[Astar_algorithm07]技术文档_Graph
Posted AIplusX
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[Astar_algorithm07]技术文档_Graph相关的知识,希望对你有一定的参考价值。
-
file: Graph.h
-
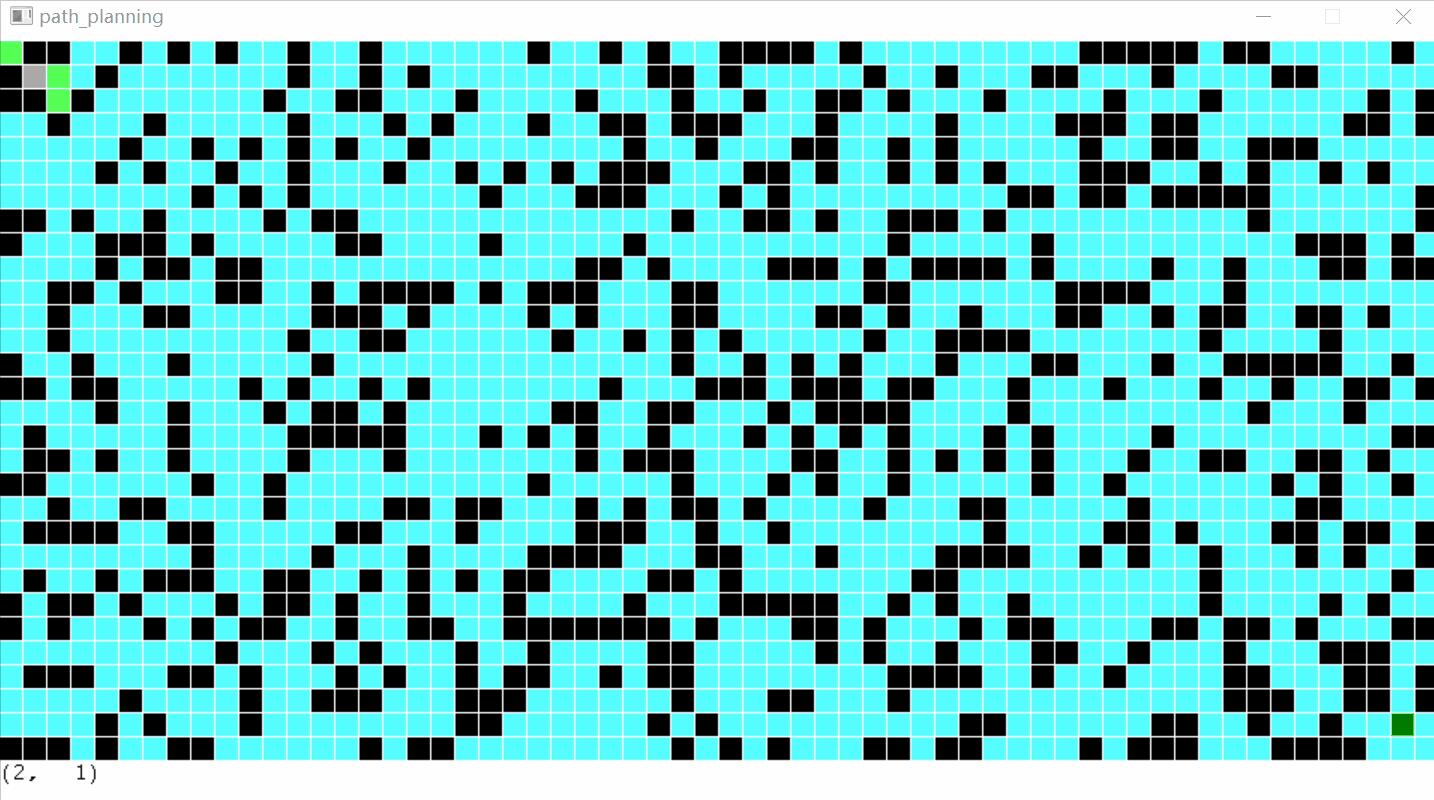
brief:这个Graph类是用来画格子地图的,这个类可以生成地图起点终点和障碍物坐标
-
author:AIplusX
-
version:beta_v0.0
-
date:2021_11_17
-
update:2021_11_17
-
warning:记得在类的析构函数里面delete掉堆内申请的内存
-
remarks:用户参数结构体里的map地图数组直接存储的是颜色数值,这样利于实现绘图,障碍物的数量是与格子数量成正比例关系的
-
todo:无
#pragma once
#include <vector>
#include <iostream>
#include <conio.h>
#include <graphics.h>
#include "Point.h"
#define RANDOM(a) (rand()%(a))
#define RANDOM_RANGE(a,b) (rand()%((b)-(a)+1)+(a)) //[i, j]
//#define BLACK 0
//#define BLUE 0xAA0000
//#define GREEN 0x00AA00
//#define CYAN 0xAAAA00
//#define RED 0x0000AA
//#define MAGENTA 0xAA00AA
//#define BROWN 0x0055AA
//#define LIGHTGRAY 0xAAAAAA
//#define DARKGRAY 0x555555
//#define LIGHTBLUE 0xFF5555
//#define LIGHTGREEN 0x55FF55
//#define LIGHTCYAN 0xFFFF55
//#define LIGHTRED 0x5555FF
//#define LIGHTMAGENTA 0xFF55FF
//#define YELLOW 0x55FFFF
//#define WHITE 0xFFFFFF
#define PATH 0xFFFF55//LIGHTCYAN
#define OBSTACLE 0x000000//BLACK
#define START 0x0000AA//RED
#define END 0x00AA00//GREEN
#define GENERATE 0x55FFFF//YELLOW
#define SEARCH 0x55FF55//LIGHTGREEN
#define PASS_SEARCH 0xAAAAAA//LIGHTGRAY
const int map_line = 60;
const int map_col = 30;
const int block = 16;
const int block_division = 3;
typedef struct _UserPara
public:
int block_size = block;
int win_width = map_line * block_size;
int win_height = map_col * block_size;
int win_real_height = win_height + block_size * 3;
int map_x = win_width / block_size - 1;
int map_y = win_height / block_size - 1;
int obstacle_num = map_line * map_col / block_division;
int map[map_line][map_col] = 0 ;
UserPara;
class A_star;
class Graph
public:
Graph(UserPara user_para);
~Graph();
friend class A_star;
static void show_map(const UserPara&);
void set_obstacles_start_end();
Point get_start();
Point get_end();
UserPara get_userPara();
std::vector<Point*> get_obstacle();
private:
UserPara graph_user_para;
Point start;
Point end;
std::vector<Point*> obstacle_vector;
std::vector<Point*> obstacle;
;
-
file:Graph.cpp
-
brief:构造函数
-
author:AIplusX
-
param:用户参数结构体
-
return:无
-
exception:无
-
note:函数内部生成起点终点和障碍物的坐标点,其中起点终点存在栈里,障碍物坐标点存在堆里,同时做easyX画图所需要的初始化操作
-
remarks:无
#include <time.h>
#include <random>
#include "Graph.h"
Graph::Graph(UserPara user_para)
graph_user_para = user_para;
start = Point(1, 1);
end = Point(graph_user_para.map_x-1, graph_user_para.map_y-1);
set_obstacles_start_end();
srand((unsigned)time(NULL));
initgraph(graph_user_para.win_width, graph_user_para.win_real_height);
settextstyle(16, 8, _T("Courier"));
setbkcolor(WHITE);
settextcolor(BLACK);
cleardevice();
-
file:Graph.cpp
-
brief:获取私有变量
-
author:AIplusX
-
param:无
-
return:相应参数
-
exception:无
-
note:无
-
remarks:无
std::vector<Point*> Graph::get_obstacle()
return obstacle;
UserPara Graph::get_userPara()
return graph_user_para;
Point Graph::get_end()
return end;
Point Graph::get_start()
return start;
-
file:Graph.cpp
-
brief:生成随机障碍坐标点
-
author:AIplusX
-
param:无
-
return:无
-
exception:无
-
note:随机障碍物坐标的生成方法是将所有坐标点存进vector里面,然后将vector打乱,之后从头开始取相应数量的坐标点做为障碍物。注意取出障碍物的坐标点之后将其从乱序vector中删除
-
remarks:注意打乱vector的方法
void Graph::set_obstacles_start_end()
for (int i = 0; i <= graph_user_para.map_x; i++)
for (int j = 0; j <= graph_user_para.map_y; j++)
Point* obstacle = new Point(i, j);
if (*obstacle != start && *obstacle != end)
obstacle_vector.push_back(obstacle);
else delete obstacle;
std::random_device rd;
std::mt19937 g(rd());
std::shuffle(obstacle_vector.begin(), obstacle_vector.end(), rd);
for (int i = 0; i < graph_user_para.obstacle_num; i++)
obstacle.push_back(obstacle_vector[0]);
obstacle_vector.erase(obstacle_vector.begin());
-
file:Graph.cpp
-
brief:可视化地图
-
author:AIplusX
-
param:用户数据结构体
-
return:无
-
exception:无
-
note:无
-
remarks:无
void Graph::show_map(const UserPara& para)
for (int i = 0; i <= para.map_x; i++)
for (int j = 0; j <= para.map_y; j++)
setfillcolor(para.map[i][j]);
fillrectangle(i * para.block_size, j * para.block_size, \\
(i + 1) * para.block_size, (j + 1) * para.block_size);
-
file:Graph.cpp
-
brief:析构函数
-
author:AIplusX
-
param:用户数据结构体
-
return:无
-
exception:无
-
note:删除掉堆里的内存,obstacle_vector和obstacle里的坐标点加起来就是整个地图上的坐标(起点终点除外)
-
remarks:无
Graph::~Graph()
for (int i = 0; i < obstacle_vector.size(); i++)
delete obstacle_vector[i];
obstacle_vector.erase(obstacle_vector.begin());
for (int i = 0; i < obstacle.size(); i++)
delete obstacle[i];
obstacle.erase(obstacle.begin());

以上是关于[Astar_algorithm07]技术文档_Graph的主要内容,如果未能解决你的问题,请参考以下文章