Linux驱动实践:带你一步一步编译内核驱动程序
Posted IOT物联网小镇
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Linux驱动实践:带你一步一步编译内核驱动程序相关的知识,希望对你有一定的参考价值。

作 者:道哥,10+年嵌入式开发老兵,专注于:C/C++、嵌入式、Linux。
文章目录
别人的经验,我们的阶梯!
大家好,我是道哥。今天给大家分享一些笔记本里的一些存货: Linux 系统中的驱动和中断相关。
大概会用 6~7 篇的文章,由浅入深的为大家介绍Linux 中驱动程序的编写方法。
文章的顺序,也是我之前自己学习时的顺序。
以前的学习记录比较零散,现在只是把它们按照一定的顺序重新梳理一下。
这几篇文章,理论知识会少一些,更注重实际的操作。
我会把操作用引导的代码,全部上传到网盘上,在文末有下载说明。
只要根据文中介绍的步骤进行操作,就一定可以操作成功。
学习的困惑
记得以前我在开始学习驱动开发的时候,找来很多文章、资料来学习,但是总是觉得缺少了点全局视角。
就好像:我想看清一座山的全貌,但总是被困在一个、又一个山谷中一样。
主要的困惑有 3 点:
每一篇文章的介绍都是正确的,但是如果把很多文章放在一起看,就会发现怎么说的都不一样啊?
有些文章注重函数的介绍,但是缺乏一个全局的视角,从整体上来观察驱动程序的结构;
对于一个新手来说,能够边学习、边实践,这是最好的学习方式,但是很多文章不会注意这方面。虽然文章内容很漂亮,但是不知道怎么去实践、验证。
因此,这几篇文章我们就从最简单的驱动模块编译开始,然后介绍字符设备驱动程序。
在这部分,会以 GPIO 为例子,重点描述其中的关键节点。
最后再介绍在中断处理程序中,如何利用信号量、小任务、工作队列,把内核事件传递到应用层来处理。
作为第一个开篇文章,从最简单的内核编译开始。
实际操作一下:如何把一个最简单的驱动程序(hello),按照 2 种方式进行编译:
编译进内核;
编译为一个独立的驱动模块;
实践环境
为了便于测试,以下操作都是在 Ubuntu16.04 操作系统里完成的。
编译Linux驱动程序,肯定需要内核源码,这里选择的是 linux-4.15 版本,可以在官网下载。
文末有下载方式。
下载之后,把linux-4.15.tar.gz解压到Ubuntu中任意目录即可,例如:解压到~/tmp/目录下:
$ tar -zxvf linux-4.15.tar.gz -C ~/tmp/
编译进内核
创建驱动程序目录
linux中的驱动,一般都放在 linux-4.15/drivers/ 目录下,因此在这个目录中创建一个hello文件夹。
$ mkdir linux-4.15/drivers/hello
对于一个驱动来说,最重要的就是3个文件:
源代码
Kconfig
Makefile
只要按照固定的格式来编写这3个文件,linux内核的编译脚本就可以确保把我们的驱动程序编译进去。
创建源文件
首先是源码,在hello文件夹中创建源文件hello.c:
$ cd linux-4.15/drivers/hello
$ touch hello.c
源文件hello.c的内容是:
#include <linux/module.h>
#include <linux/init.h>
// 当驱动被加载的时候,执行此函数
static int __init hello_init(void)
{
printk(KERN_ALERT "welcome, hello"\\n");
return 0;
}
// 当驱动被卸载的时候,执行此函数
static void __exit hello_exit(void)
{
printk(KERN_ALERT "bye, hello\\n");
}
// 版权声明
MODULE_LICENSE("GPL");
// 以下两个函数属于 Linux 的驱动框架,只要把驱动两个函数地址注册进去即可。
module_init(hello_init);
module_exit(hello_exit);
有两个小地方注意一下:
在内核中,打印函数是 printk,而不是 printf;
打印信息的级别有好几个,从 DEBUG 到 EMERG,这里使用的是 KERN_ALERT,方便查看打印信息。
创建 Kconfig 文件
这个文件是用来对内核进行配置的,当执行 make menuconfig 指令的时候,这个文件就被解析。
先创建文件:
$ cd linux-4.15/drivers/hello
$ touch Kconfig
添加如下内容:
config HELLO
tristate "hello driver"
help
just a simplest driver.
default y
第一行内容 config HELLO ,在执行配置的时候,将会生成一个变量 CONFIG_HELLO ,而这个变量,将会在编译的时候,被 Makefile 引用。
最后一行的 default y ,就表示把 CONFIG_HELLO 的值设置成 y,从而让这个驱动被编译到内核中。
现在,hello驱动中的KConfig配置文件已经准备好了,但是还需要这个配置文件登记到 Linux内核的整体配置文件中。
也就是把它登记在 linux-4.15/drivers/Kconfig 文件的末尾:
source "drivers/hello/Kconfig"
endmenu // 加在这一句的上面
现在,可以来执行下面指令,看一下具体的配置界面:
$ cd linux-4.15/
$ make distclean
$ make ARCH=x86_64 defconfig
$ make ARCH=x86_64 menuconfig
第2条指令,是用来把默认的配置保存到当前目录下的 .config 配置文件,也就是把一个默认的配置文件复制过来,作为我们自己的配置文件。
以后再修改配置参数时,修改的内容就会存储在 .config 文件中,
第3条指令,是用来配置内核的,可以进入 Device Drivers 菜单,然后在最底层看到我们的 hello driver 被标记成星号,
这表示被编译进内核。
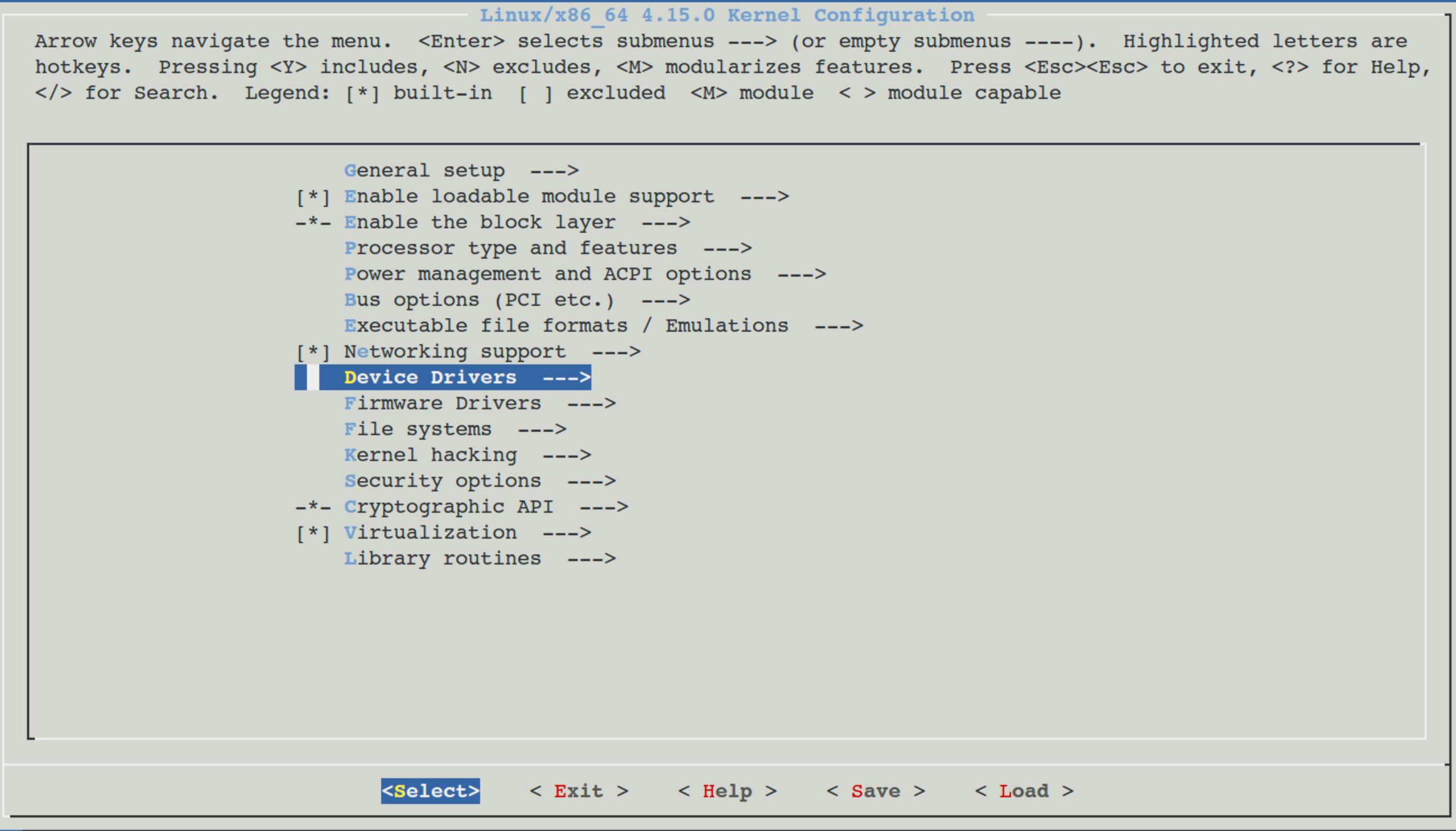
按向下方向键,把高亮定位到 Device Drivers —> ,然后敲回车键,进入到 Device Drivers 的配置界面。
按向下方向键,一直到最后一个条目,就可以看到我们的 hello 驱动了,如下:
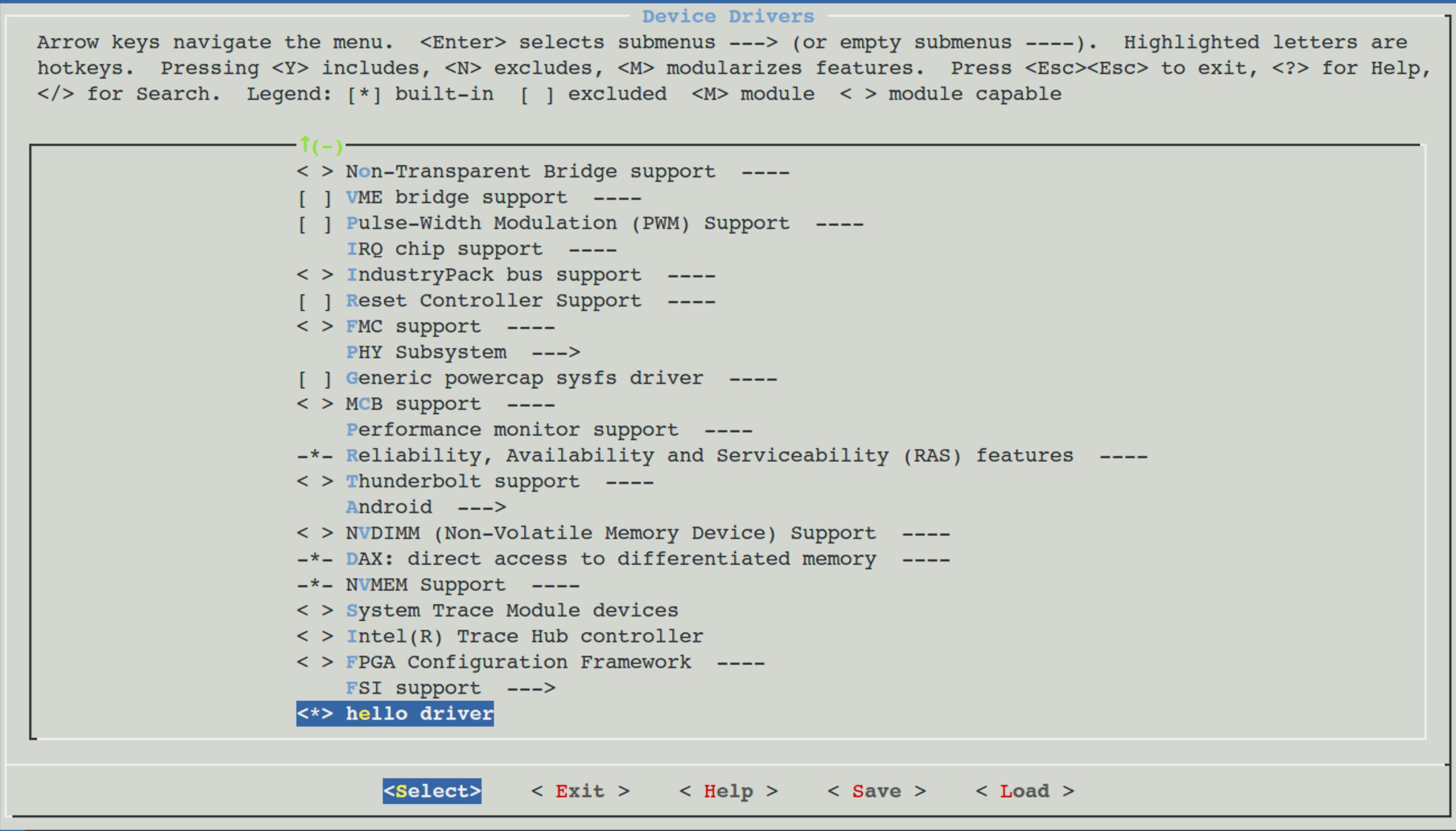
可以看到 hello driver 前面显示的是型号 *,这表示:该驱动将会编译进内核。
我们可以按下空格键试一下,会在三种标记中切换:型号,M,空值。M 标记意思是编译成驱动模块。
我们这里选择星号(编译进内核),然后按下右方向键,最下方的几个按键的焦点移动到 按钮上:
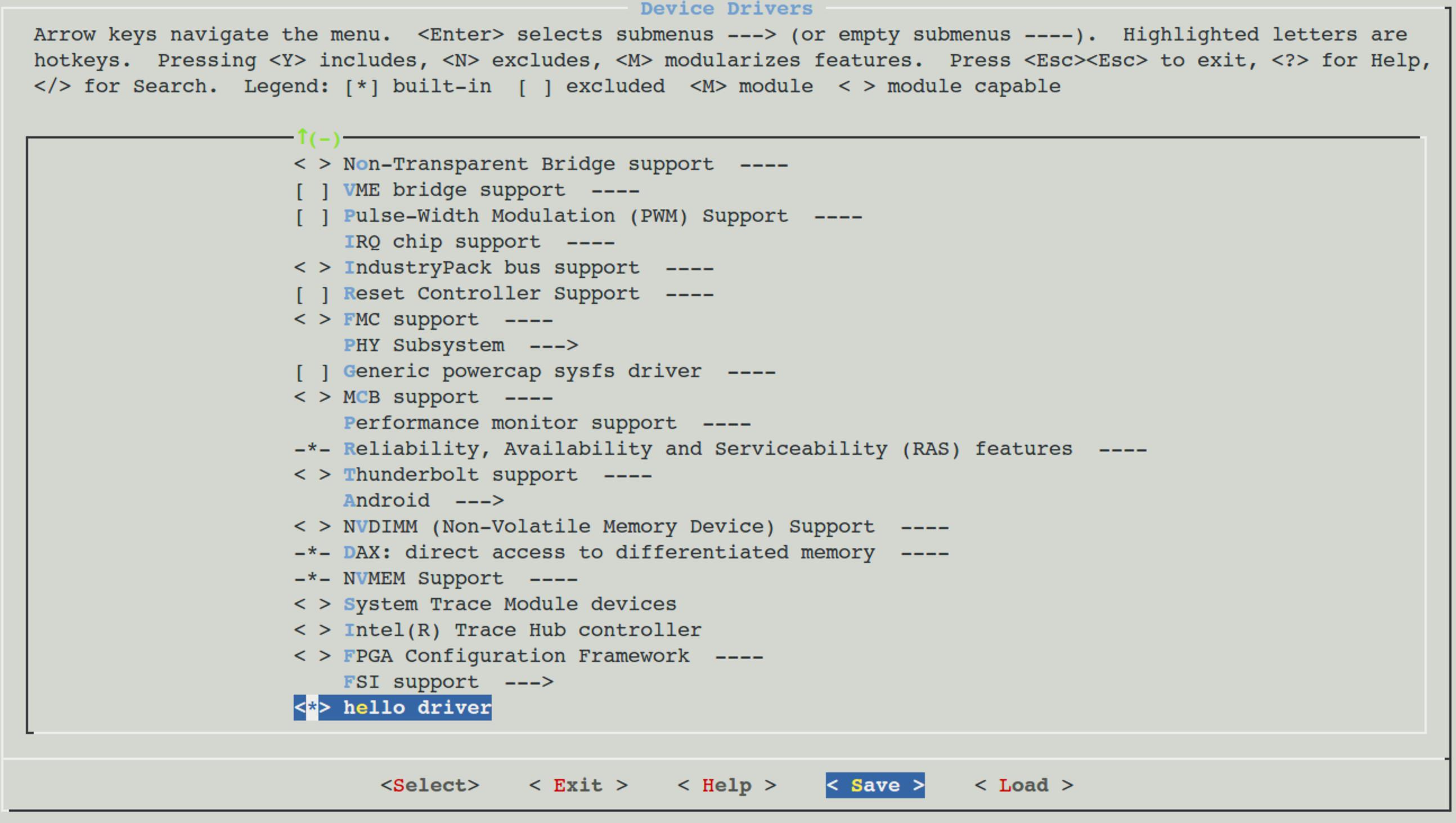
按下回车键,就会弹出保存对话框,选择默认保存文件 .config 即可,然后在 按钮高亮的时候,按下回车键即可保存。
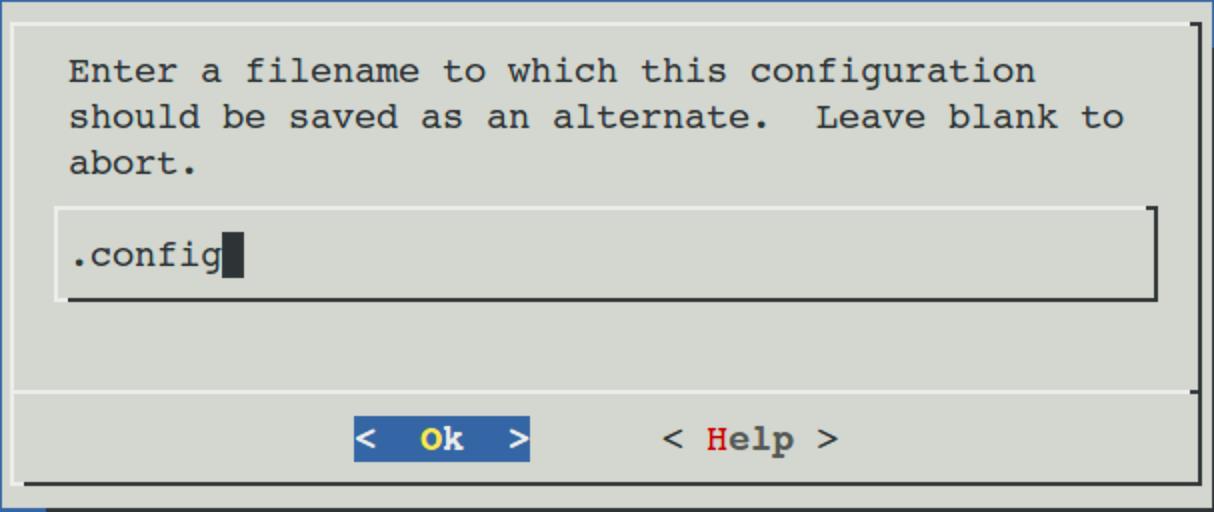
此时,在弹出的确认窗口中,选择<Exit>,按下回车键即可:
此时,返回到 Device Drivers 的配置界面,在最下面的按钮中,选择让<Exit>高亮,然后一路退出即可。
创建 Makefile 文件
Makefile文件是make工具的脚本,首先创建它:
$ cd linux-4.15/drivers/hello
$ touch Makefile
其中的内容只有一行:
obj-$(CONFIG_HELLO) += hello.o
CONFIG_HELLO 可以看做一个变量,在编译的时候,这个变量的值可能是:y, n 或者 m。
在刚才的 Kconfig 参数配置中,CONFIG_HELLO 被设置为 y,于是这句话就被翻译成: obj-y += hello,表示把 hello 驱动编译进内核。
现在,hello驱动程序的Makefile已经创建好了,我们还要让linux内核的编译框架知道这个文件才行。
在文件 linux-4.15/drivers/Makefile 中的末尾,添加如下内容:
obj-$(CONFIG_HELLO) += hello/
编译
万事俱备,只欠编译!依次执行如下指令:
$ cd linux-4.15/
$ make -j4
make指令执行结束之后,编译得到的内核中(vmlinux)就包含了我们的hello驱动。
编译为驱动模块
编译为驱动模块,也有两种 操作方式:
编译所有的驱动模块
在执行 make ARCH=x86_64 menuconfig 指令的时候,把 hello 配置成 M;
然后在 linux-4.15 中执行编译模块指令:make -j4 modules。
编译成功之后,就可以得到文件: linux-4.15/drivers/hello/hello.ko。
这样的编译指令,是把所有的模块都编译了一次(在输出信息中,可以看到编译了很多模块)。
只编译 hello 这一个驱动模块
另外一种编译驱动模块的方式是:进入hello目录,只编译这一个驱动模块。
这种编译方法,就需要修改hello目录下的Makefile文件了,内容如下:
可以把 hello 目录下的所有文件删除,只保留源文件 hello.c,然后新建 Makefile 文件。
ifneq ($(KERNELRELEASE),)
obj-m := hello.o
else
KERNELDIR ?= /lib/modules/$(shell uname -r)/build
PWD := $(shell pwd)
default:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
clean:
$(MAKE) -C $(KERNEL_PATH) M=$(PWD) clean
endif
然后,在hello文件夹中执行make指令,即可得到驱动模块 hello.ko 。
验证一下
加载驱动:
$ cd linux-4.15/drivers/hello
$ sudo insmod ./hello.ko
此时终端窗口是没有任何输出的,需要输入指令 dmesg | tail ,可以看到 hello_init 函数的输出内容:

卸载驱动:
$ sudo rmmod hello
再次输入 dmesg | tail ,可以看到 hello_exit 函数的输出内容:

资料下载
在公众号【IOT物联网小镇】的后台回复关键字:1112,获取下列文件的网盘地址:
linux-4.15.tar.gz
hello文件夹压缩包
推荐阅读
【2】C语言指针-从底层原理到花式技巧,用图文和代码帮你讲解透彻

以上是关于Linux驱动实践:带你一步一步编译内核驱动程序的主要内容,如果未能解决你的问题,请参考以下文章