点云配准 3- icp-交互式ICP点云配准
Posted 行码阁119
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了点云配准 3- icp-交互式ICP点云配准相关的知识,希望对你有一定的参考价值。
一、声明
本人作为初学者,才开始接触点云配准这一块,如有错误地方,望大家指出,我将及时修改,共同进步。其次这一部分主要是点云数据配准的第一个程序,也是官方代码比较直观的一次icp配准实验。
二、数据来源
本次数据来源于斯坦福大学的兔子,龙,和猴子。在此注明一下,官方代码只能用于三者重建好了点云数据。
斯坦福大学的兔子和龙,猴子点云数据下载地址(麻烦大家打一个小星星):
StarStar-666/PointData (github.com)
三、代码,
由于是在windows上面运行的代码,需对官方代码稍作修改,修改如下即可(把对应的数据路劲修改即可):
//读取ply文件
if (pcl::io::loadPLYFile<pcl::PointXYZ>("E:/LX/PLC/点云数据/dragon_stand/dragon_recon.tar/dragon_recon/dragon_vrip_res2.ply", *cloud_in) == -1)
{
PCL_ERROR("Couldn't read file1 \\n");
return (-2);
}
std::cout << "Loaded " << cloud_in->size() << " data points from file1" << std::endl;
if (pcl::io::loadPLYFile<pcl::PointXYZ>("E:/LX/PLC/点云数据/dragon_stand/dragon_recon.tar/dragon_recon/dragon_vrip_res2.ply", *cloud_icp) == -1)
{
PCL_ERROR("Couldn't read file1 \\n");
return (-2);
}3.1 完整代码
#include <iostream>
#include <string>
#include <pcl/io/ply_io.h> //ply格式读取
#include <pcl/io/pcd_io.h> //pcd格式读取
#include <pcl/point_types.h> //PCL中支持的点类型头文件
#include <pcl/registration/icp.h>
#include <pcl/visualization/pcl_visualizer.h> //可视化头文件
#include <pcl/console/time.h> // TicToc 计时
typedef pcl::PointXYZ PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
bool next_iteration = false;
void
print4x4Matrix(const Eigen::Matrix4d& matrix)
{
printf("Rotation matrix :\\n");
printf(" | %6.3f %6.3f %6.3f | \\n", matrix(0, 0), matrix(0, 1), matrix(0, 2));
printf("R = | %6.3f %6.3f %6.3f | \\n", matrix(1, 0), matrix(1, 1), matrix(1, 2));
printf(" | %6.3f %6.3f %6.3f | \\n", matrix(2, 0), matrix(2, 1), matrix(2, 2));
printf("Translation vector :\\n");
printf("t = < %6.3f, %6.3f, %6.3f >\\n\\n", matrix(0, 3), matrix(1, 3), matrix(2, 3));
}
void
keyboardEventOccurred(const pcl::visualization::KeyboardEvent& event,
void* nothing)//使用空格键来增加迭代次数,并更新显示
{
if (event.getKeySym() == "space" && event.keyDown())
next_iteration = true;
}
int
main(int argc,
char* argv[])
{
// 将会出现的三个点云模型
PointCloudT::Ptr cloud_in(new PointCloudT); // (原始点云)Original point cloud
PointCloudT::Ptr cloud_tr(new PointCloudT); // (位姿变化点云)Transformed point cloud
PointCloudT::Ptr cloud_icp(new PointCloudT); // (ICP迭代输出点云)ICP output point cloud
int iterations = 1; // 默认的ICP迭代次数
pcl::console::TicToc time;
time.tic();
//读取ply文件
if (pcl::io::loadPLYFile<pcl::PointXYZ>("E:/LX/PLC/点云数据/dragon_stand/dragon_recon.tar/dragon_recon/dragon_vrip_res2.ply", *cloud_in) == -1)
{
PCL_ERROR("Couldn't read file1 \\n");
return (-2);
}
std::cout << "Loaded " << cloud_in->size() << " data points from file1" << std::endl;
if (pcl::io::loadPLYFile<pcl::PointXYZ>("E:/LX/PLC/点云数据/dragon_stand/dragon_recon.tar/dragon_recon/dragon_vrip_res2.ply", *cloud_icp) == -1)
{
PCL_ERROR("Couldn't read file1 \\n");
return (-2);
}
std::cout << "Loaded " << cloud_icp->size() << " data points from file1" << std::endl;
// 定义旋转矩阵和平移向量Matrix4d是4*4的矩阵
Eigen::Matrix4d transformation_matrix = Eigen::Matrix4d::Identity();
// 旋转矩阵 (请参考 https://en.wikipedia.org/wiki/Rotation_matrix)
double theta = M_PI / 8; // // 旋转的角度用弧度的表示方法
transformation_matrix(0, 0) = std::cos(theta);
transformation_matrix(0, 1) = -sin(theta);
transformation_matrix(1, 0) = sin(theta);
transformation_matrix(1, 1) = std::cos(theta);
// 平移向量在X,Y,Z方向的位移 (meters)
transformation_matrix(0, 3) = 1;
transformation_matrix(1, 3) = 2;
transformation_matrix(2, 3) = 4;
// 在终端显示转换矩阵
std::cout << "Applying this rigid transformation to: cloud_in -> cloud_icp" << std::endl;
print4x4Matrix(transformation_matrix);
// 执行点云转化
pcl::transformPointCloud(*cloud_icp, *cloud_icp, transformation_matrix);
*cloud_tr = *cloud_icp; // 备份cloud_icp赋值给cloud_tr为后期使用
// icp算法配准
time.tic();
pcl::IterativeClosestPoint<PointT, PointT> icp;
icp.setMaximumIterations(iterations); //设置要执行的初始迭代次数(默认值为1)
icp.setInputSource(cloud_icp);//设置输入点云
icp.setInputTarget(cloud_in); //设置目标点云(输入点云进行仿射变换,得到目标点云)
icp.align(*cloud_icp);//匹配后源点云
icp.setMaximumIterations(1); // 设置为1以便下次调用
std::cout << "Applied " << iterations << " ICP iteration(s) in " << time.toc() << " ms" << std::endl;
if (icp.hasConverged()) //输出变换矩阵的适合性评估,检查ICP算法是否收敛;否则退出程序。如果成功,我们将转换矩阵存储在4x4矩阵中,然后打印刚性矩阵转换
{
std::cout << "\\nICP has converged, score is " << icp.getFitnessScore() << std::endl;
std::cout << "\\nICP transformation " << iterations << " : cloud_icp -> cloud_in" << std::endl;
transformation_matrix = icp.getFinalTransformation().cast<double>();
print4x4Matrix(transformation_matrix);
}
else
{
PCL_ERROR("\\nICP has not converged.\\n");
return (-1);
}
// //可视化
pcl::visualization::PCLVisualizer viewer("ICP demo");
// 创建两个独立垂直观察视点
int v1(0);
int v2(1);
viewer.createViewPort(0.0, 0.0, 0.5, 1.0, v1);
viewer.createViewPort(0.5, 0.0, 1.0, 1.0, v2);
// 定义显示的颜色信息
float bckgr_gray_level = 0.0; // 黑色
float txt_gray_lvl = 1.0 - bckgr_gray_level;
// 原始的点云设置为白色的
pcl::visualization::PointCloudColorHandlerCustom<PointT> cloud_in_color_h(cloud_in, (int)255 * txt_gray_lvl, (int)255 * txt_gray_lvl,
(int)255 * txt_gray_lvl);
viewer.addPointCloud(cloud_in, cloud_in_color_h, "cloud_in_v1", v1);
viewer.addPointCloud(cloud_in, cloud_in_color_h, "cloud_in_v2", v2);
// 转换后的点云显示为绿色
pcl::visualization::PointCloudColorHandlerCustom<PointT> cloud_tr_color_h(cloud_tr, 20, 180, 20);
viewer.addPointCloud(cloud_tr, cloud_tr_color_h, "cloud_tr_v1", v1);
// ICP配准后的点云为红色
pcl::visualization::PointCloudColorHandlerCustom<PointT> cloud_icp_color_h(cloud_icp, 180, 20, 20);
viewer.addPointCloud(cloud_icp, cloud_icp_color_h, "cloud_icp_v2", v2);
// 加入文本的描述在各自的视口界面
viewer.addText("White: Original point cloud\\nGreen: Matrix transformed point cloud", 10, 15, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "icp_info_1", v1);
viewer.addText("White: Original point cloud\\nRed: ICP aligned point cloud", 10, 15, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "icp_info_2", v2);
std::stringstream ss; //需要使用字符串流ss来将整数迭代转换为字符串,在终端显示迭代次数
ss << iterations;
std::string iterations_cnt = "ICP iterations = " + ss.str();
viewer.addText(iterations_cnt, 10, 60, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "iterations_cnt", v2);
viewer.setBackgroundColor(bckgr_gray_level, bckgr_gray_level, bckgr_gray_level, v1);
viewer.setBackgroundColor(bckgr_gray_level, bckgr_gray_level, bckgr_gray_level, v2);
// 设置相机的坐标和方向(在终端初始观察的位置)
viewer.setCameraPosition(-3.68332, 2.94092, 5.71266, 0.289847, 0.921947, -0.256907, 0);
viewer.setSize(1280, 1024); //可视化窗口的大小
// 配准按键回调函数 :
viewer.registerKeyboardCallback(&keyboardEventOccurred, (void*)NULL);
//显示可视化终端
while (!viewer.wasStopped())
{
viewer.spinOnce();
// 按下空格键 :
if (next_iteration)
{
// The Iterative Closest Point algorithm(ICP算法)
time.tic();
icp.align(*cloud_icp);
std::cout << "Applied 1 ICP iteration in " << time.toc() << " ms" << std::endl;
if (icp.hasConverged())
{
printf("\\033[11A"); // Go up 11 lines in terminal output.
printf("\\nICP has converged, score is %+.0e\\n", icp.getFitnessScore());
std::cout << "\\nICP transformation " << ++iterations << " : cloud_icp -> cloud_in" << std::endl;
transformation_matrix *= icp.getFinalTransformation().cast<double>(); // WARNING /!\\ This is not accurate! For "educational" purpose only!
print4x4Matrix(transformation_matrix); // // 打印原始位置与现在位置的矩阵变换
ss.str("");
ss << iterations;
std::string iterations_cnt = "ICP iterations = " + ss.str();
viewer.updateText(iterations_cnt, 10, 60, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "iterations_cnt");
viewer.updatePointCloud(cloud_icp, cloud_icp_color_h, "cloud_icp_v2");
}
else
{
PCL_ERROR("\\nICP has not converged.\\n");
return (-1);
}
}
next_iteration = false;
}
return (0);
}
四 实验结果
4.1 龙
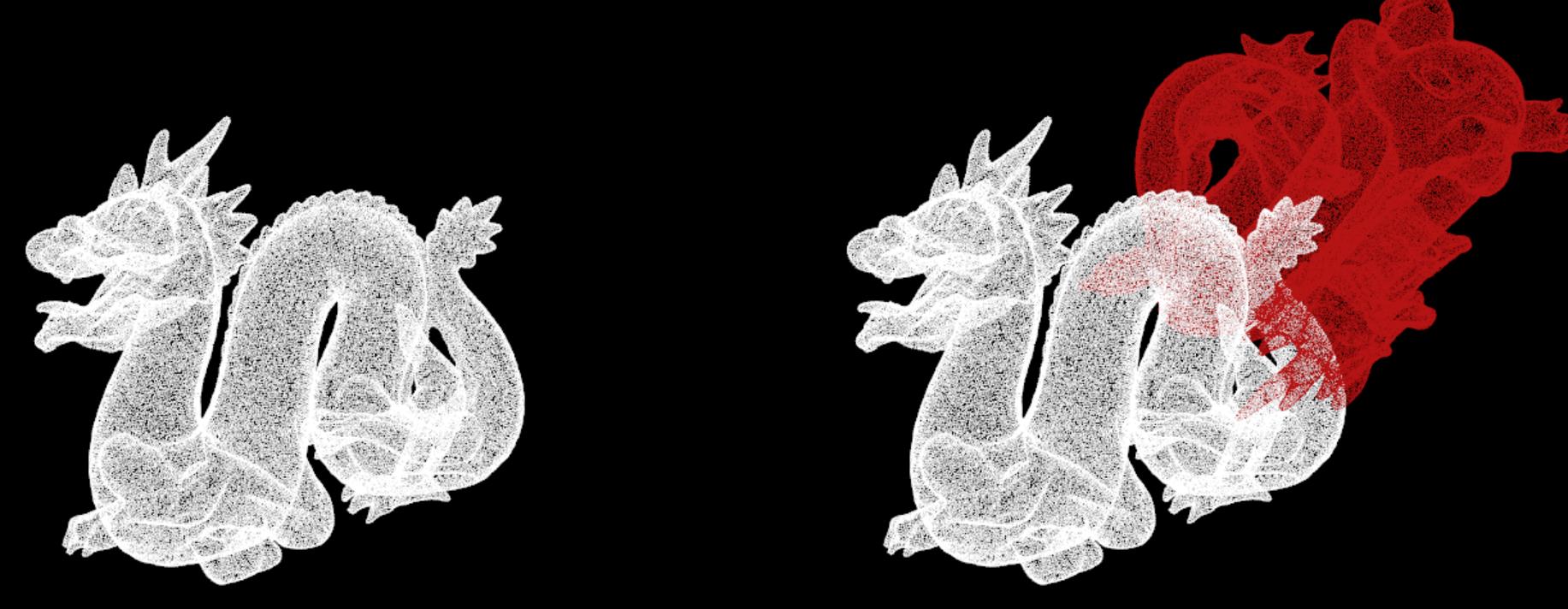
随着迭代的进行,发现icp对于其配准效果不好(迭代47step),龙头和龙尾是相反的:
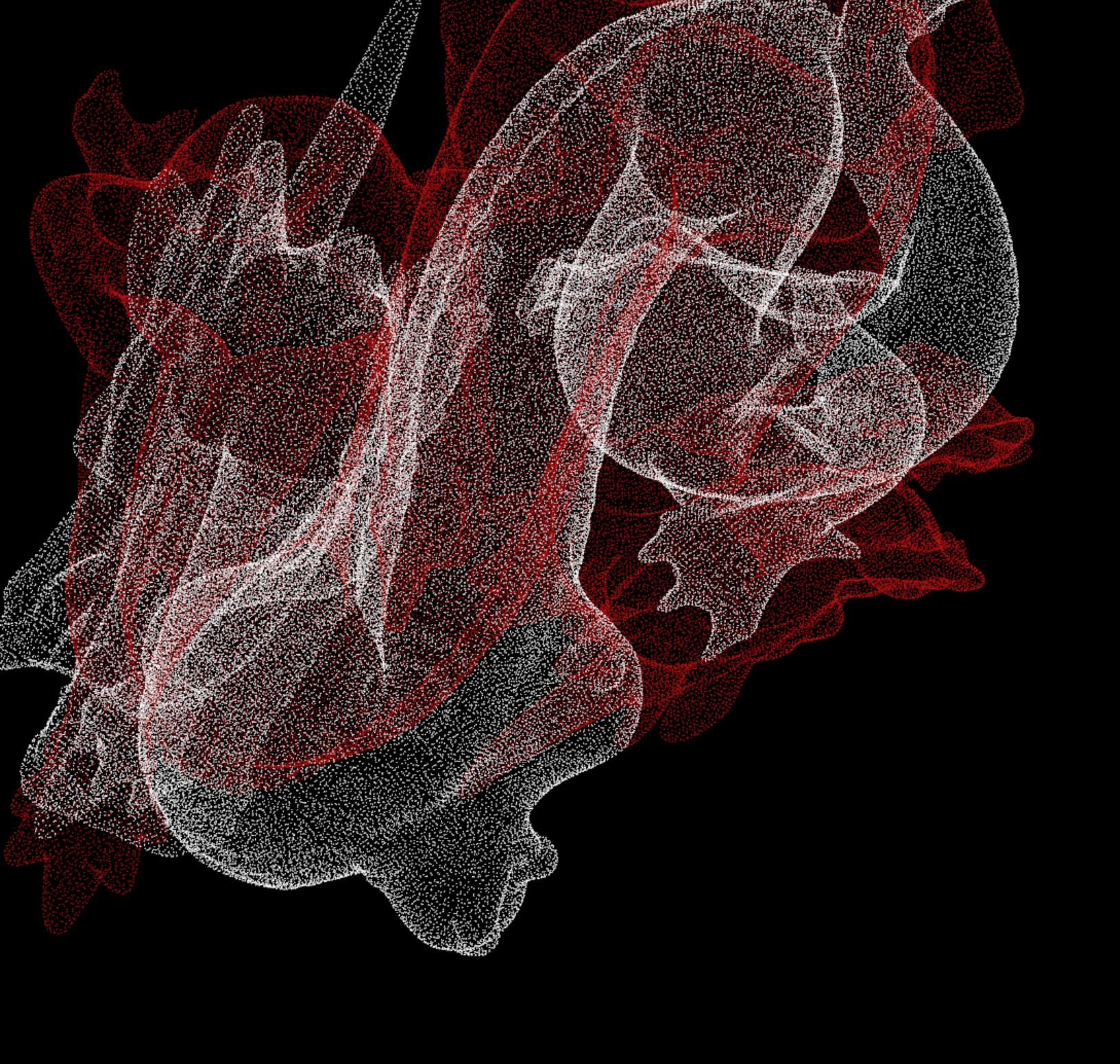
迭代104step
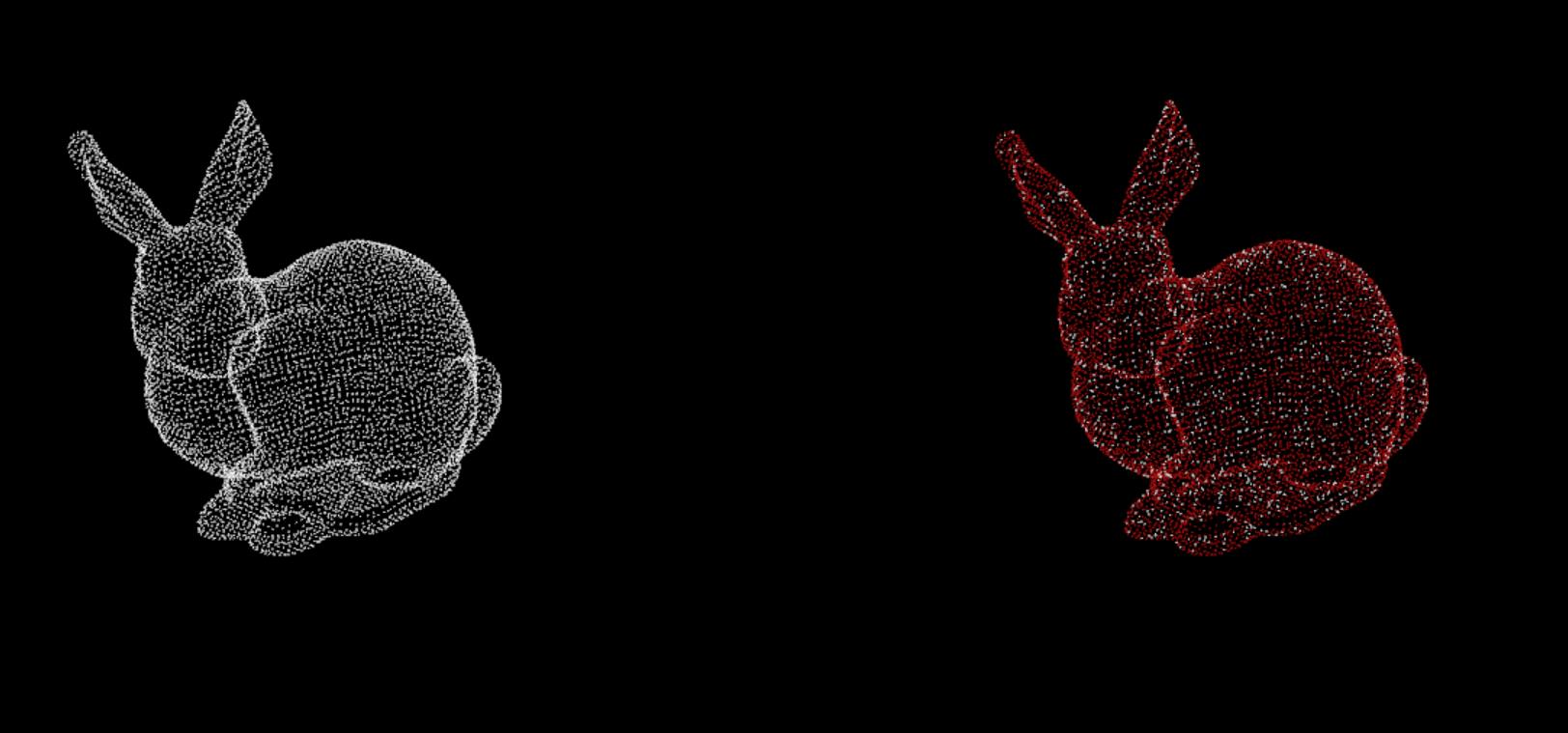
4.2 兔子

迭代31sep就可
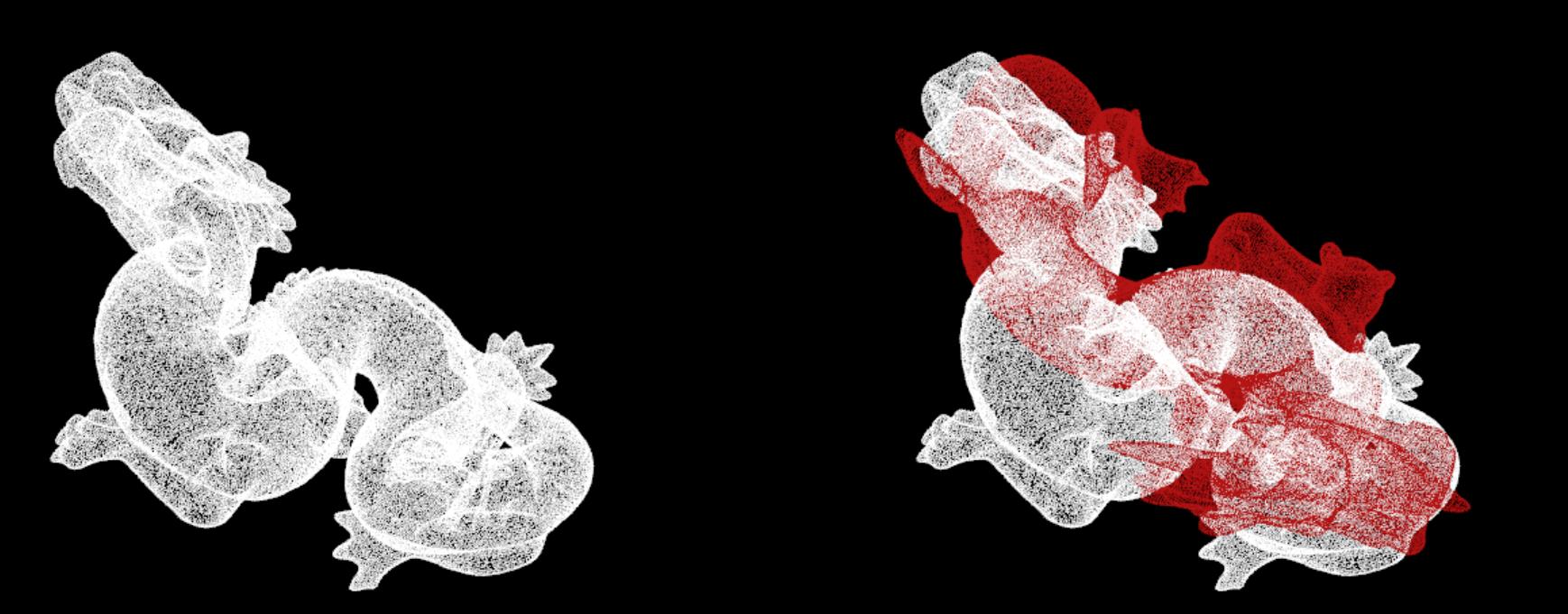
当目标点云和源电源初始状态差距太大,

迭代327epoch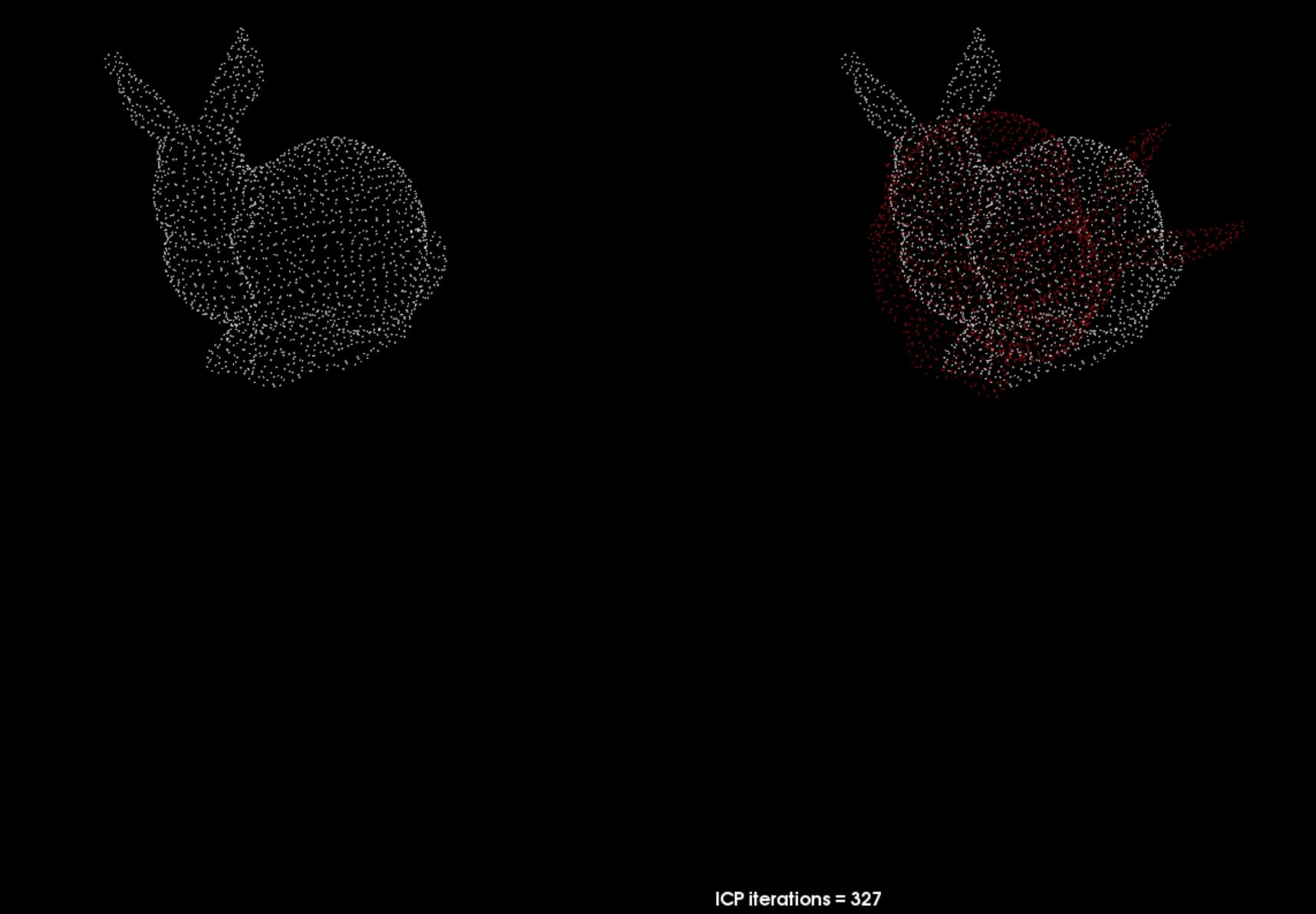
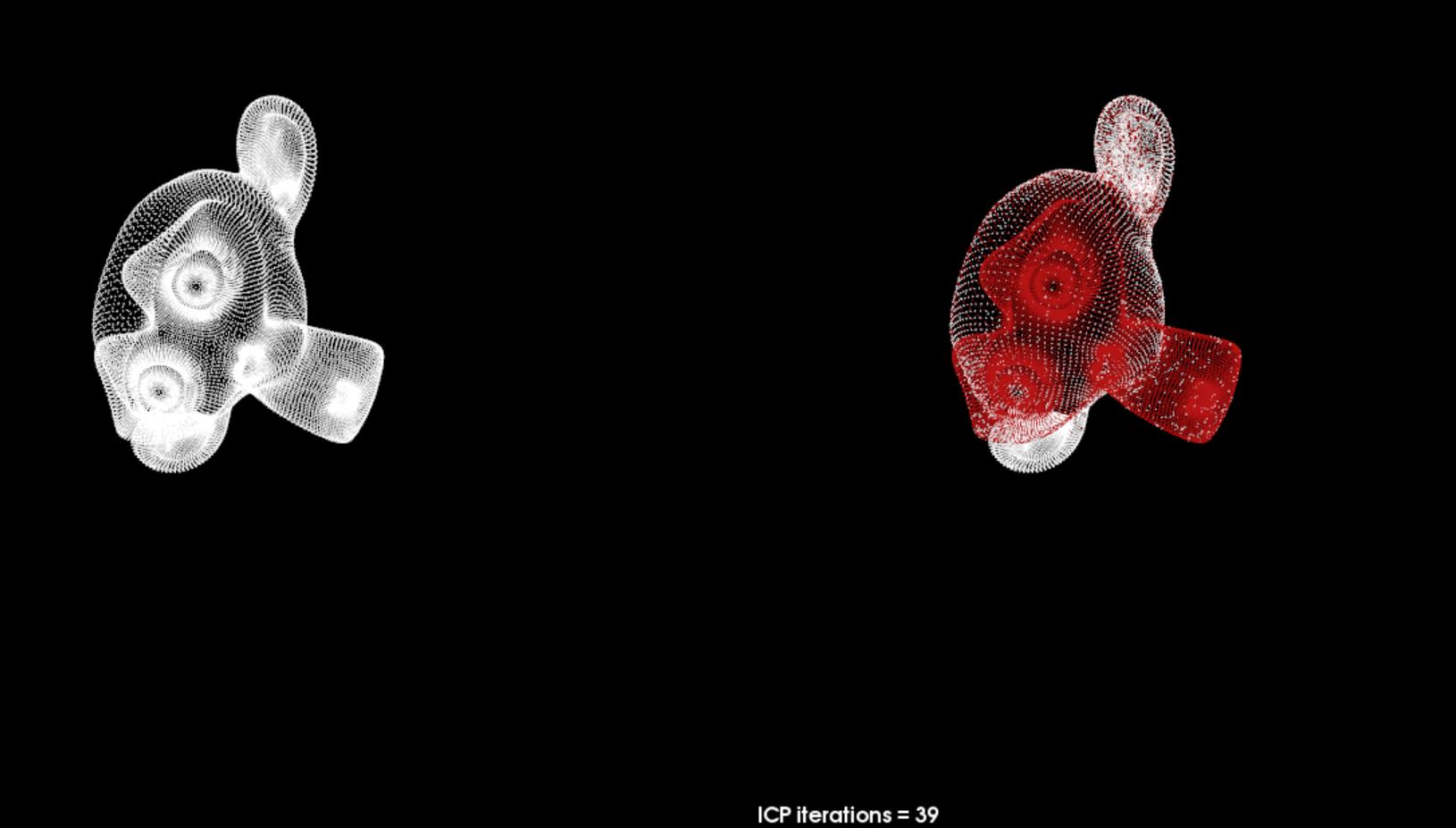
4.3 猴子

五、结论
1、点之间的重复性越大,icp配准效果越好
2、icp适合精配准,如果差异性太大,效果不是很好(比较龙)
3、容易陷入局部最优
以上是关于点云配准 3- icp-交互式ICP点云配准的主要内容,如果未能解决你的问题,请参考以下文章