ENC28J60 简介
Posted Li-Yongjun
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ENC28J60 简介相关的知识,希望对你有一定的参考价值。
单片机以太网方案
单片机想要使用以太网的话,通常有以下几种方案:
- 如果 MCU 内部集成 MAC 控制器,则只需外接一个 PHY 芯片就可以了
- 如果 MCU 内部没有 MAC 控制器,需要外接 MAC 芯片和 PHY 芯片,这两颗芯片可以分立也可以集成在一颗芯片中
以上两种方案,MAC + PHY 完成了 TCP/IP 五层模型的最低两层,即物理层和数据链路层。上面几层,如网络层、传输层、应用层则需要在 MCU 中实现。当然,普通程序员要想实现 IP 层、TCP/UDP 层还是有一定难度的。不过不用担心,我们可以使用成熟的开源 TCP/IP 协议栈,如 uIP、LwIP。它们都是轻量级的 TCP/IP 协议栈,适用于资源受限的单片机。
- 使用硬件 TCP/IP 协议栈,MCU 只需要实现应用层代码就可以了
例如,使用 W5500 芯片,传输层及其以下全部由外部这颗芯片完成,MCU 只需要配置 W5500,从 W5500 收发数据,完成应用层逻辑就可以了。还有一种方案是 MCU 外接一个串口转以太网模块,原理和使用 W5500 方案类似。
ENC28J60
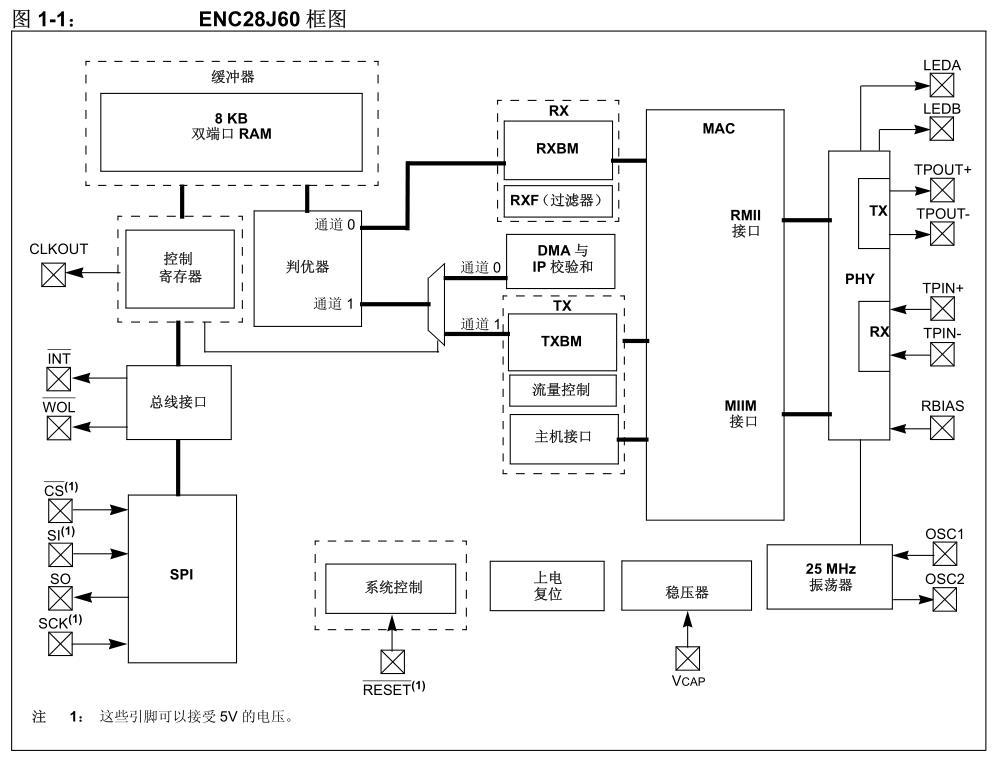
ENC28J60 属于上面介绍的方案 2,ENC28J60 单颗芯片集成了 MAC 和 PHY,提供 SPI 接口用来和 MCU 通信。
寄存器 —— 硬件的灵活性体现
在方案 2 中,网络层、传输层、应用层 是以软件的形式在 CPU 中实现的,而物理层、数据链路层则是以硬件的形式在 ENC28J60 中实现的,虽然 ENC28J60 是一个硬件,我们无法对其进行编程修改功能,但其仍然留有一定的灵活性,那就是可以配置的寄存器。我们可以设置寄存器以达到控制最低两层的目的,也可以读寄存器以达到监控最低两层的目的。
比如我们可以设置 ECON1 寄存器,来控制接收使能、发送请求、DMA、存储区选择等。
还可以设置 PHCON1 寄存器,来控制 PHY 模块复位等功能。
缓冲器 —— 硬件的价值体现
说到底 ENC28J60 的功能是从 IP 层拿数据并发送出去,或者将收到的数据送给 IP 层。这两个方向的操作都需要用到缓冲器,用来暂存数据。
ENC28J60 读写特性
ENC28J60 中有三种类型的存储器:
• 控制寄存器
• 以太网缓冲器
• PHY 寄存器
其中 MCU 可以通过 SPI 接口,使用指令来直接读写 控制寄存器 和 以太网缓冲器。但是不可以通过 SPI 接口直接访问 PHY 寄存器,只可以通过 MAC 中的 MII 访问这些寄存器。
可以理解为 SPI 是和 MAC 相连的,可以直接访问 MAC 的寄存器,但是 PHY 只与 MAC 通过 RMII、MIIM 接口相连,所以想要读取 PHY 寄存器的值,必须要通过 MAC,进一步讲是通过 MAC 的 MIIM 接口,或者说是通过 MAC 的 MII 寄存器。
ENC28J60 中所有的存取器都是以静态 RAM 的方式实现的。
控制寄存器存储空间分为四个存储区,可用 ECON1 寄存器中的存储区选择位 BSEL1:BSEL0 进行选择。 每个存储区都是 32 字节长,可以用 5 位地址值进行寻址。
所有存储区的最后五个单元 (1Bh 到 1Fh)都指向同一组寄存器:EIE、EIR、ESTAT、ECON2 和 ECON1。 它们是控制和监视器件工作的关键寄存器,由于被映射到同一存储空间,因此可以在不切换存储区的情况下很方便地访问它们。
下图是所有的控制寄存器:
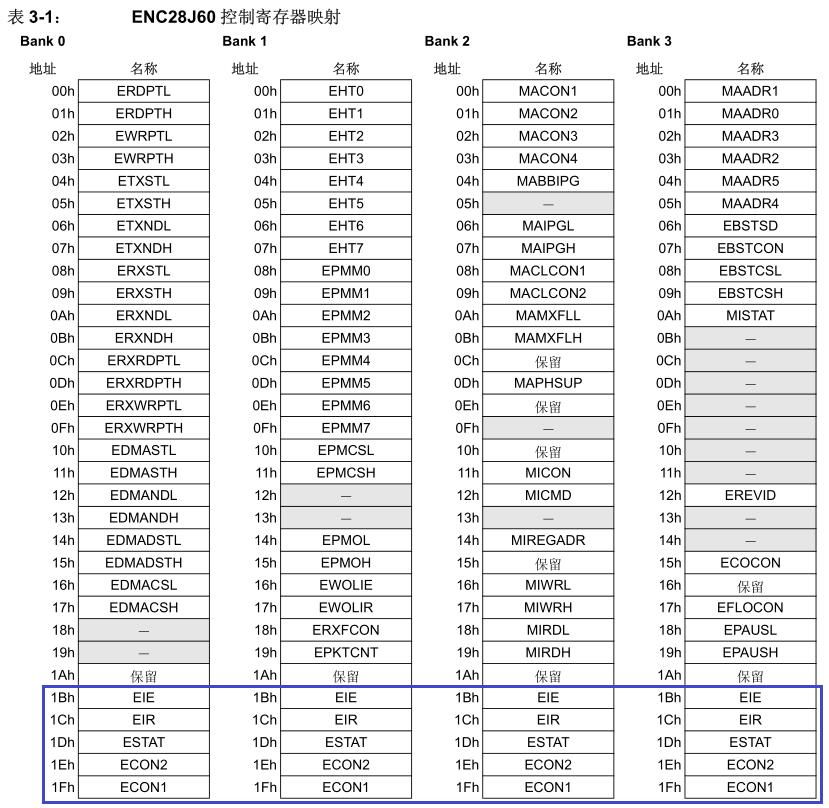
能够从任意 Bank 访问 ECON1 是有必要的,因为 ECON1 中存有选择 Bank 的两个 bit,倘若 ECON1 只能在 Bank 0 中访问,那么,一旦将访问权切换到 Bank 2,而 Bank 2 又无法访问 ECON1 来选择 Bank,那不就悲催了嘛,只能停留在 Bank 2 了。。😂
读取 PHY 寄存器实例
下面粗略地写一段代码来读取 PHY 的 PHSTAT1 寄存器,此寄存器的 bit2 表示链路状态

我们就按照步骤一步步写

代码
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t tx_data = 0x00;
uint8_t rx_data = 0x00;
uint16_t pyh_data;
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SPI1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* 1111111111111111111. */
/* select bank 2 begin */
tx_data = 0xA0 | 0x1F; // BFC | ECONT1 // BF
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
tx_data = 0x03; // 清除最低两位 // 03
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET); // 拉高 CS 引脚可结束 BFC 命令
tx_data = 0x80 | 0x1F; // BFS | ECONT1 // 9F
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
tx_data = 0x02; // 10h 表示选中 bank2 // 02
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET); // 拉高 CS 引脚可结束 BFS 命令
/* select bank 2 end */
/* MIREGADR(14h) <-- PHSTAT1(01h) begin */
tx_data = 0x40 | 0x14; // WCR | MIREGADR(14h) // 地址 // 54
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
tx_data = 0x01; // PHSTAT1(01h) // 值 // 01
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET);
/* MIREGADR(14h) <-- PHSTAT1(01h) end */
/* 2222222222222222222 */
/* MICMD(12h) <-- MIIRD(01h) begin */ // 92
tx_data = 0x80 | 0x12; // BFS | MICMD(12h) // 地址
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
tx_data = 0x01; // MIIRD(01h) // 值 // 01
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET);
/* MICMD(12h) <-- MIIRD(01h) end */
/* select bank 3 begin */
tx_data = 0x80 | 0x1F; // BFS | ECONT1 // 9F
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
tx_data = 0x03; // 11h 表示选中 bank2 // 03
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET); // À¸ß CS Òý½Å¿É½áÊø BFS ÃüÁî
/* select bank 3 end */
/* MISTAT(0Ah) <-- BUSY(01h) begin */
tx_data = 0x80 | 0x0A; // BFS | MICMD(0Ah) // 地址 // 8A
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
tx_data = 0x01; // BUSY(01h) // 值 // 01
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET);
/* MISTAT(0Ah) <-- BUSY(01h) end */
/* 333333333333333333. */
/* 等待 10.24us */
// HAL_Delay(1);
/* MISTAT(0Ah) */
// tx_data = 0x00 | 0x0A; // RCR | MISTAT(0Ah) // µØÖ·
// HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
// HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
//
// HAL_SPI_Transmit(&hspi1, &rx_data, 1, 10); // ¶ÁÖµ
// HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET);
///* MIREGADR(14h) <-- PHSTAT1(01h) end */
// printf("rx_data = 0x%x\\r\\n", rx_data);
/* 4 */
/* select bank 2 begin */
tx_data = 0xA0 | 0x1F; // BFC | ECONT1
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
tx_data = 0x03; // Çå³ý×îµÍÁ½Î»
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET); // À¸ß CS Òý½Å¿É½áÊø BFC ÃüÁî
tx_data = 0x80 | 0x1F; // BFS | ECONT1
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
tx_data = 0x02; // 10h ±íʾѡÖÐ bank2
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET); // À¸ß CS Òý½Å¿É½áÊø BFS ÃüÁî
/* select bank 2 end */
/* MICMD(12h) <-- MIIRD(01h) begin */
tx_data = 0xA0 | 0x12; // BFC | MICMD(12h) // µØÖ·
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
tx_data = 0x01; // MIIRD(01h) // Öµ
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET);
/* MICMD(12h) <-- MIIRD(01h) end */
/* 5 */
/* read MIRDL(18h) begin */
tx_data = 0x00 | 0x18; // RCR | MIRDL(18h) // µØÖ·
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_SPI_Receive(&hspi1, &rx_data, 1, 10); // ¶ÁÖµ
// printf("rx_data = 0x%x\\r\\n", rx_data);
HAL_SPI_Receive(&hspi1, &rx_data, 1, 10); // ¶ÁÖµ
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET);
// printf("rx_data = 0x%x\\r\\n", rx_data);
pyh_data = rx_data;
/* read MIRDH(19h) begin */
tx_data = 0x00 | 0x19; // RCR | MIRDH(19h) // µØÖ·
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &tx_data, 1, 10);
HAL_SPI_Receive(&hspi1, &rx_data, 1, 10);
HAL_SPI_Receive(&hspi1, &rx_data, 1, 10); // ¶ÁÖµ
HAL_GPIO_WritePin(SPI1_CS_GPIO_Port, SPI1_CS_Pin, GPIO_PIN_SET);
/* read MIRDH(19h) end */
// printf("rx_data = 0x%x\\r\\n", rx_data);
pyh_data = pyh_data + (rx_data << 8);
printf("pyh_data = 0x%x\\r\\n", pyh_data);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
// printf("helo\\r\\n");
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
HAL_Delay(1000);
// printf("0x%X: 0x%x\\n", tx_data, rx_data);
// cr_addr++;
}
/* USER CODE END 3 */
}
插拔网线
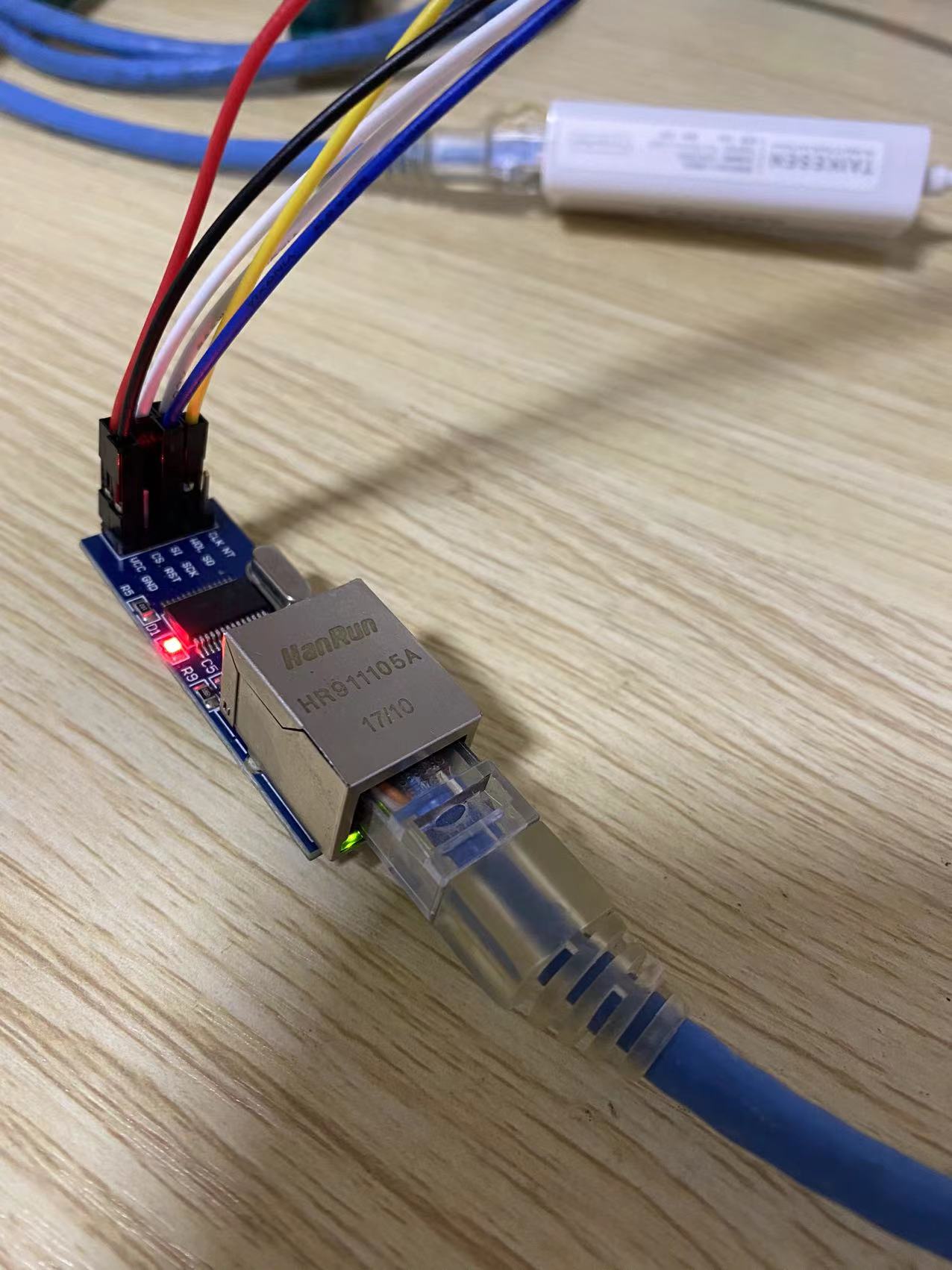

读取到的 PHSTAT1 寄存器值

插上网线,值为 0x1804,即 bit2 = 1;
拔掉网线,值为 0x1800,即 bit2 = 0。
读到的寄存器状态和网线连接状态一致,成功!
以上是关于ENC28J60 简介的主要内容,如果未能解决你的问题,请参考以下文章