传感与检测实验报告,差动变压器的特性测定,江南大学物联网自动化
Posted 叶绿体不忘呼吸
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了传感与检测实验报告,差动变压器的特性测定,江南大学物联网自动化相关的知识,希望对你有一定的参考价值。

public class LeastSquares {
public static void matching(double[] x, double[] y, double[] input, double fully) {
double k = getK(x, y);
double b = getB(x, y);
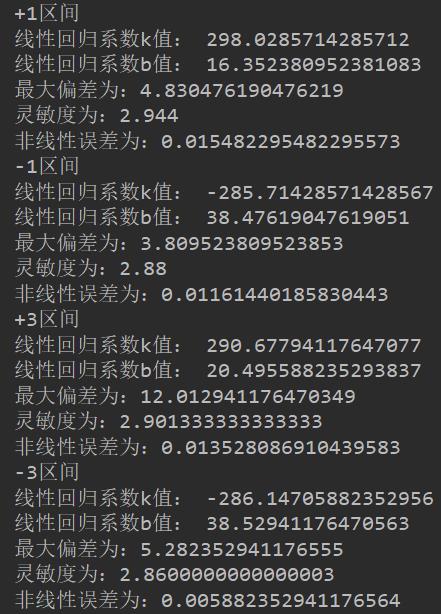
System.out.println("线性回归系数k值:\\t"+k+"\\n" + "线性回归系数b值:\\t" + b);
double maxy = 0; //用来记录最大偏差
//寻找最大偏差
for (int i = 0; i < input.length; i++) {
if (Math.abs(k * input[i] + b - y[i]) > maxy){
maxy = Math.abs(k * input[i] + b - y[i]);
}
}
System.out.println("最大偏差为:" + maxy);
//求灵敏度
double s = 0;
double sum = 0;
for (int i = 1; i < y.length; i++) {
sum += y[i] - y[i-1];
}
s = sum / (y.length - 1) / 20;
System.out.println("灵敏度为:" + s);
//求线性误差
System.out.println("非线性误差为:" + maxy/fully);
}
//返回x的系数k公式:k=( n sum( xy ) - sum( x ) sum( y ) )/( n sum( x^2 )-sum(x) ^ 2 )
public static double getK(double[] x, double[] y) {
int n = x.length;
return (double) ((n * pSum(x, y) - sum(x) * sum(y)) / (n * sqSum(x) - Math.pow(sum(x), 2)));
}
//返回常量系数系数b 公式:b = sum( y ) / n - k * sum( x ) / n
public static double getB(double[] x, double[] y) {
int n = x.length;
double k = getK(x, y);
return sum(y) / n - k * sum(x) / n;
}
//求和
private static double sum(double[] ds) {
double s = 0;
for (double d : ds) {
s = s + d;
}
return s;
}
//求平方和
private static double sqSum(double[] ds) {
double s = 0;
for (double d : ds) {
s = (double) (s + Math.pow(d, 2));
}
return s;
}
//返回对应项相乘后的和
private static double pSum(double[] x, double[] y) {
double s = 0;
for (int i = 0; i < x.length; i++) {
s = s + x[i] * y[i];
}
return s;
}
public static void main(String[] args) {
double[] x1 = {0,0.2,0.4,0.6,0.8,1.0};
double[] y1 = {17.6,73.6,133,200,256,312};
double[] inputs1 = x1;
double[] x2 = {0,-0.2,-0.4,-0.6,-0.8,-1.0};
double[] y2 = {40.0,96,152,208,264,328};
double[] inputs2 = x2;
double[] x3 = {0,0.2,0.4,0.6,0.8,1.0,1.2,1.4,1.6,1.8,2.0,2.2,2.4,2.6,2.8,3.0};
double[] y3 = {17.6,73.6,133,200,256,312,372,428,484,548,600,672,712,776,832,888};
double[] inputs3 = x3;
double[] x4 = {0,-0.2,-0.4,-0.6,-0.8,-1.0,-1.2,-1.4,-1.6,-1.8,-2.0,-2.2,-2.4,-2.6,-2.8,-3.0};
double[] y4 = {40.0,96,152,208,264,328,384,440,496,552,616,666,720,784,840,898};
double[] inputs4 = x4;
System.out.println("+1区间");
matching(x1, y1,inputs1,y1[y1.length-1]);
System.out.println("-1区间");
matching(x2, y2,inputs2,y2[y2.length-1]);
System.out.println("+3区间");
matching(x3, y3,inputs3,y3[y3.length-1]);
System.out.println("-3区间");
matching(x4, y4,inputs4,y4[y4.length-1]);
}
}
以上是关于传感与检测实验报告,差动变压器的特性测定,江南大学物联网自动化的主要内容,如果未能解决你的问题,请参考以下文章