2021电赛F题之openmv巡线(完结)
Posted 要努力加油-
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了2021电赛F题之openmv巡线(完结)相关的知识,希望对你有一定的参考价值。
效果展示:
出错解决方法
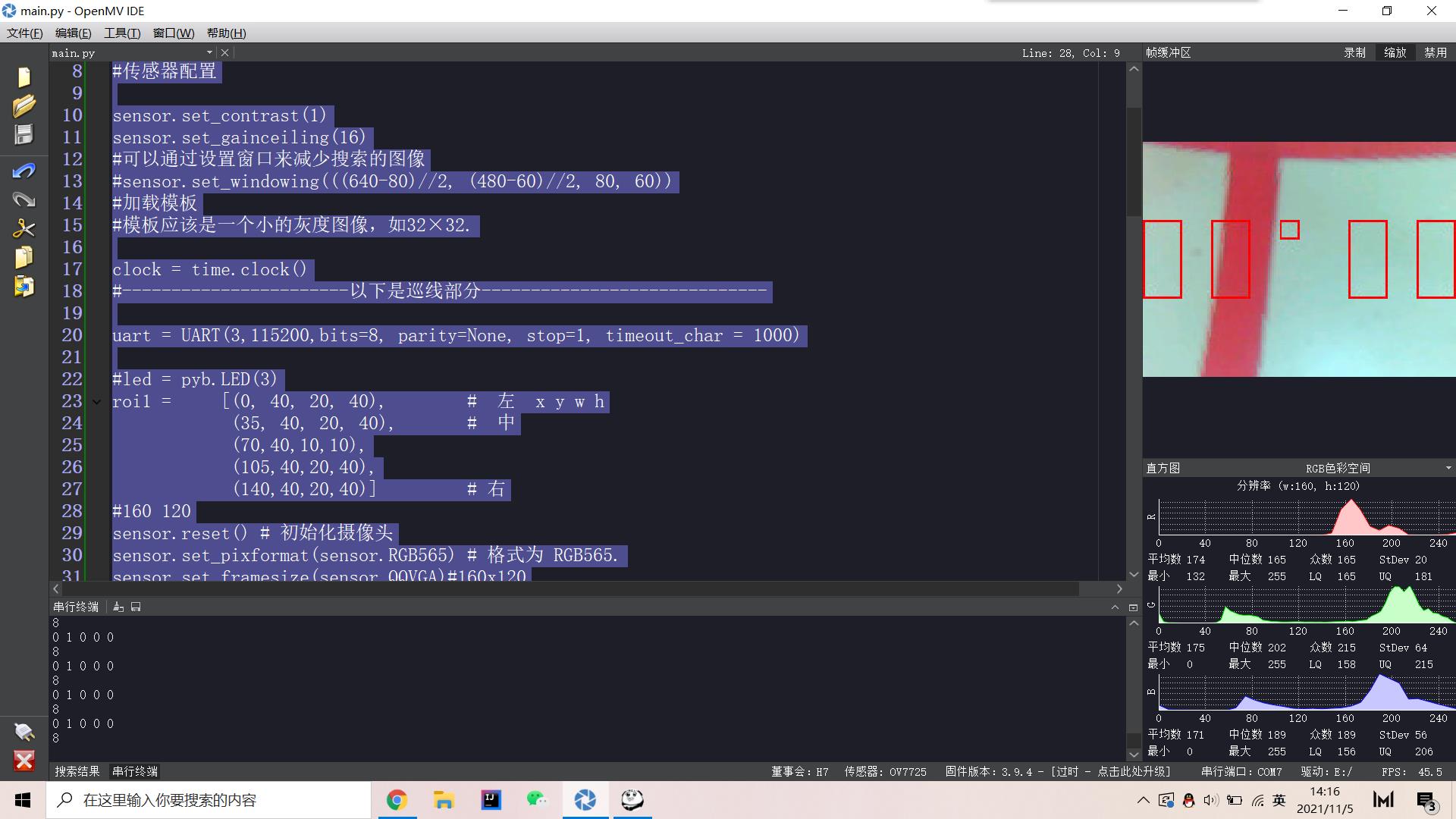
通过使用不同阈值的方法可以得到当前区域中什么区域有红线,对于电控而言作用类似于红外对管,之后电控通过逻辑判断如何运动,这就是我们队伍目前的思想。最后会不会用上还不确定。
如果对你有帮助就点个赞吧
代码下载
import pyb, sensor, image, math, time
from pyb import UART
import ustruct
from image import SEARCH_EX, SEARCH_DS
#传感器配置
sensor.set_contrast(1)
sensor.set_gainceiling(16)
#可以通过设置窗口来减少搜索的图像
#sensor.set_windowing(((640-80)//2, (480-60)//2, 80, 60))
#加载模板
#模板应该是一个小的灰度图像,如32×32.
clock = time.clock()
#-----------------------以下是巡线部分-----------------------------
uart = UART(3,115200,bits=8, parity=None, stop=1, timeout_char = 1000)
#led = pyb.LED(3)
roi1 = [(0, 40, 20, 40), # 左 x y w h
(35, 40, 20, 40), # 中
(70,40,10,10),
(105,40,20,40),
(140,40,20,40)] # 右
#160 120
sensor.reset() # 初始化摄像头
sensor.set_pixformat(sensor.RGB565) # 格式为 RGB565.
sensor.set_framesize(sensor.QQVGA)#160x120
sensor.skip_frames(time=2000) # 跳过10帧,使新设置生效
sensor.set_auto_whitebal(True) # turn this off.
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_vflip(False)# 垂直方向翻转
sensor.set_hmirror(False)# 水平方向翻转
clock = time.clock()
#low_threshold = (0, 100) # 105--115
#GRAYSCALE_THRESHOLD = [(20,100)]
#思路 现在需要除红线外全是黑色,红线为白
GROUND_THRESHOLD=(59, 25, 127, 19, -128, 89)
def sending_data(data):
global uart;
data = ustruct.pack("<bbb", #格式为俩个字符俩个短整型(2字节)
0xA5, #帧头1
0xA6,
data
) #数组大小为7,其中2,3,4,5为有效数据,0,1,6为帧头帧尾
uart.write(data); #必须要传入一个字节数组
#print("head",data[0],"status",data[1],"tail",data[2])
print(data[2])
getp=0
#GRAYSCALE_THRESHOLD =(59, 25, 127, 19, -128, 89)
GROUND_THRESHOLD1=(78, 24, 127, 18, -28, 59)
#GRAYSCALE_THRESHOLD =(100, 33, 114, 22, 11, 127)#(100, 33, 127, 28, -4, 127)#(100, 30, 127, 17, -37, 127)
while(True):
data=0
blob1=None
blob2=None
blob3=None
blob4=None
blob5=None
flag = [0,0,0,0,0]
img = sensor.snapshot().lens_corr(strength = 1.7 , zoom = 1.0)#畸变矫正
#img.binary([low_threshold],invert = 1)#设置最低阈值 反转
#img = sensor.snapshot().binary([GROUND_THRESHOLD])
blob1 = img.find_blobs([GROUND_THRESHOLD1], roi=roi1[0]) #left
blob2 = img.find_blobs([GROUND_THRESHOLD1], roi=roi1[1]) #middle
blob3 = img.find_blobs([GROUND_THRESHOLD], roi=roi1[2])
blob4 = img.find_blobs([GROUND_THRESHOLD1], roi=roi1[3])
blob5 = img.find_blobs([GROUND_THRESHOLD1], roi=roi1[4])
if blob1:
flag[0] = 1 #左边检测到红线
if blob2:
flag[1] = 1 #中间检测到红线
if blob3:
flag[2] = 1 #右边检测到红线
if blob4:
flag[3] = 1 #中间检测到红线
if blob5:
flag[4] = 1 #右边检测到红线
print(flag[0],flag[1],flag[2],flag[3],flag[4])
for i in (0,1,2,3,4): # 0 1 2 3 4
data|=(flag[i]<<(4-i))
sending_data(data)
for rec in roi1:
img.draw_rectangle(rec, color=(255,0,0))#绘制出roi区域
以上是关于2021电赛F题之openmv巡线(完结)的主要内容,如果未能解决你的问题,请参考以下文章