恒源云_CAN: 借助数据分布提升分类性能
Posted AI酱油君
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了恒源云_CAN: 借助数据分布提升分类性能相关的知识,希望对你有一定的参考价值。
文章来源 | 恒源云社区(专注人工智能/深度学习GPU免费加速平台,官方体验网址:https://gpushare.com)
原文作者 | Mathor
本文将介绍一种用于分类问题的后处理技巧(Trick),出自EMNLP 2021 Findings的一篇论文《When in Doubt: Improving Classification Performance with Alternating Normalization》。经过实测,CAN(Classification with Alternating Normalization)确实多数情况下能提升多分类问题的效果(CV、NLP通用),而且几乎没有增加预测成本,因为它仅仅只是对预测结果的重新归一化操作
CAN的思想
有趣的是,其实CAN的思想非常朴素,朴素到我们每个人几乎都用过。具体来说,假设考试中有10道选择题,前9道你都比较有信心,第10题完全不会只能瞎蒙,但是你发现前面9题选A、B、C、D的比例是3:3:2:2,那么第10题在蒙的时候,你会不会更倾向于C和D?如果是更极端的情况,你发现前面9题选A、B、C的都有,但就是没有选D的,那你蒙第10题的时候,会不会更倾向于D?
回到分类任务上,假设现在有一个二分类问题,模型对于输入aaa给出的预测结果是 p ( a ) = [ 0.05 , 0.95 ] p^{(a)}=[0.05,0.95] p(a)=[0.05,0.95],那么我们就可以给出预测类别为1;接下来,对于输入bbb,模型给出的预测结果是 p ( b ) = [ 0.5 , 0.5 ] p^{(b)}=[0.5,0.5] p(b)=[0.5,0.5],这种结果是最不确定的,我们也不知道应该输出哪个类别
但是,假如我告诉你:
- 类别必然是0或1其中之一
- 两个类别出现的概率各为0.5
在已知这两点「先验」信息的情况下,由于前一个样本的预测结果为1,那么基于朴素的均匀思想,我们是否会更倾向于将后一个样本预测为0,以得到一个满足第二点「先验」的预测结果?
这些简单的例子背后,有着跟CAN同样的思想,其实就是用**「先验分布」来校正「低置信度」的预测结果,使得新的预测结果的分布更接近先验分布**
TOP-K熵
准确地说,CAN是针对低置信度预测结果的后处理手段,所以我们首先要有一个衡量预测结果不确定性的指标。常见的度量是「熵」,对于
p
=
[
p
1
,
p
2
,
…
,
p
m
]
p=[p_1,p_2,…,p_m]
p=[p1,p2,…,pm] ,定义为

虽然熵是一个常见的选择,但其实它得出的结果并不总是符合我们的直观理解。例如对于
p
(
a
)
=
[
0.5
,
0.25
,
0.25
]
和
p
(
b
)
=
[
0.5
,
0.5
,
0
]
p^{(a)}=[0.5, 0.25,0.25]和p^{(b)}=[0.5,0.5,0]
p(a)=[0.5,0.25,0.25]和p(b)=[0.5,0.5,0],直接套用公式得到
H
(
p
(
b
)
)
H
(
p
(
b
)
)
H(p^{(b)})H(p ^{(b)} )
H(p(b))H(p(b)),但如果让人主观去评价这两个概率分布,显然我们会认为
p
(
b
)
比
p
(
a
)
p^{(b)}比p^{(a)}
p(b)比p(a)更不确定,所以直接用熵还不够合理
客观地讲,熵值越大,表示这个系统内部越不稳定。如果要与置信度联系起来,熵值越大,置信度越低
一个简单的修正是只用前top-k个概率值来算熵,假设
p
1
,
p
2
,
…
,
p
k
p_1,p_2,…,p_k
p1,p2,…,pk是概率最高的
k
k
k个值,那么

其中,
T
\\mathcal{T}
T是一个取向量最大的前k个值的操作
R
m
{R}^{m}
Rm→
R
k
{R}^{k}
Rk。我们可以将式(2)带入式(1)展开得

其中,
p
i
=
p
i
/
∑
i
=
1
k
p
i
p~i= p_i / \\sum\\limits_{i=1}^k p_i
p i=pi/i=1∑kpi
交替归一化(ALTERNATING NORMALIZATION)
这一部分我先给出论文中的算法步骤描述,下一节我会手动模拟一遍计算过程
Step1
设列向量
b
0
∈
R
m
\\mathbf{b}_0\\in \\mathbb{R}^m
b0∈Rm为输入样本
x
x
x对应各类别的概率分布,
m
m
m表示类别数。我们生成一个
n
n
n×
m
m
m的概率矩阵
A
0
,
A
0
A_0,A_0
A0,A0其实是
n
n
n个置信度非常高的样本对各个类别的预测概率向量拼接而得,通过将
A
0
和
b
0
A_0和\\mathbf{b}_0
A0和b0进行拼接得到一个
(
n
+
1
)
×
m
(n+1)×m
(n+1)×m的矩阵
L
0
L_0
L0

Step2
第二步是一个迭代的过程,具体来说,首先对矩阵
L
0
L_0
L0进行列归一化(使得每列求和为1),然后进行行归一化(使得每行求和为1)。进行算法步骤前,先定义一个向量对角化操作:

D(v)会将列向量
v
∈
R
n
\\mathbf{v}\\in \\mathbb{R}^n
v∈Rn转换为
n
×
n
n×n
n×n的对角矩阵,对角线元素即原本的向量元素
列归一化

其中,参数
α
∈
N
+
\\alpha \\in \\mathbb{N}^+
α∈N+控制着
b
0
\\mathbf{b}_0
b0收敛到高置信度的速度(越大速度越快,默认取1);
e
∈
R
n
+
1
\\mathbf{e}\\in \\mathbb{R}^{n+1}
e∈Rn+1是全1的列向量。经过式(4)的变换后,矩阵
S
d
∈
R
(
n
+
1
)
×
m
S_d\\in \\mathbb{R}^{(n+1)\\times m}
Sd∈R(n+1)×m是
L
d
−
1
L_{d-1}
Ld−1矩阵的列归一化形式;
Λ
S
−
1
\\Lambda_S^{-1}
ΛS−1是
Λ
S
\\Lambda_S
ΛS的逆矩阵
行归一化

其中,
e
∈
R
m
\\mathbf{e}\\in \\mathbb{R}^{m}
e∈Rm仍然是全1的列向量,只不过此时它的维度是mmm维的;矩阵
L
d
∈
R
(
n
+
1
)
×
m
L_d\\in \\mathbb{R}^{(n+1)\\times m}
Ld∈R(n+1)×m是行归一化的(但
L
d
L_d
Ld并不是具体某个矩阵的行归一化形式);
Λ
q
∈
R
m
×
m
\\Lambda_q \\in \\mathbb{R}^{m\\times m}
Λq∈Rm×m是一个对角矩阵,对角线上的元素是各类别的分布占比
例如
表示这是一个三分类问题,并且各个类别的比例为1:2:2

Step3
Step2循环迭代ddd次后得到的矩阵
L
d
L_d
Ld:

其中,
b
d
\\mathbf{b}_d
bd就是根据「先验分布」调整后的新的概率分布
注意,这个过程需要我们遍历每个低置信度的预测结果,也就是说逐个样本进行修正,而不是一次性修正的。并且虽然迭代过程中 A 0 A_0 A0里对应的各个样本的预测概率也都随之更新了,但那只是临时结果,最后都是弃之不用的,每次修正都是用原始的 A 0 A_0 A0
模拟计算AN(ALTERNATING NORMALIZATION)
首先我们设置一些矩阵和参数
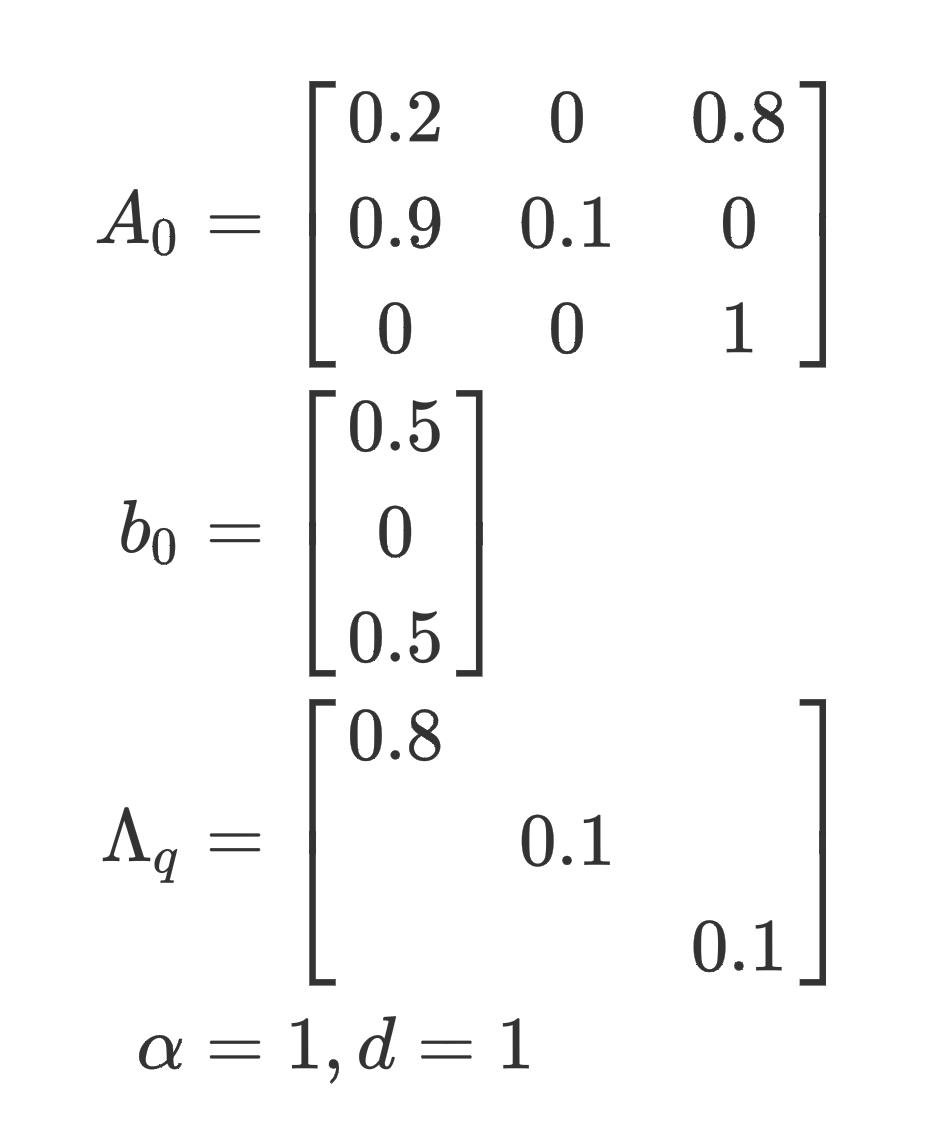
稍微解释一下,
A
0
A_0
A0根据原算法描述是nnn个置信度比较高的样本的预测概率分布进行拼接,可以看出只有3个样本置信度比较高,并且他们的预测类别分别为2,0,2;
b
0
b_0
b0以上是关于恒源云_CAN: 借助数据分布提升分类性能的主要内容,如果未能解决你的问题,请参考以下文章