2机器学习实现 Rosenblatt 感知器
Posted 安果移不动
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了2机器学习实现 Rosenblatt 感知器相关的知识,希望对你有一定的参考价值。
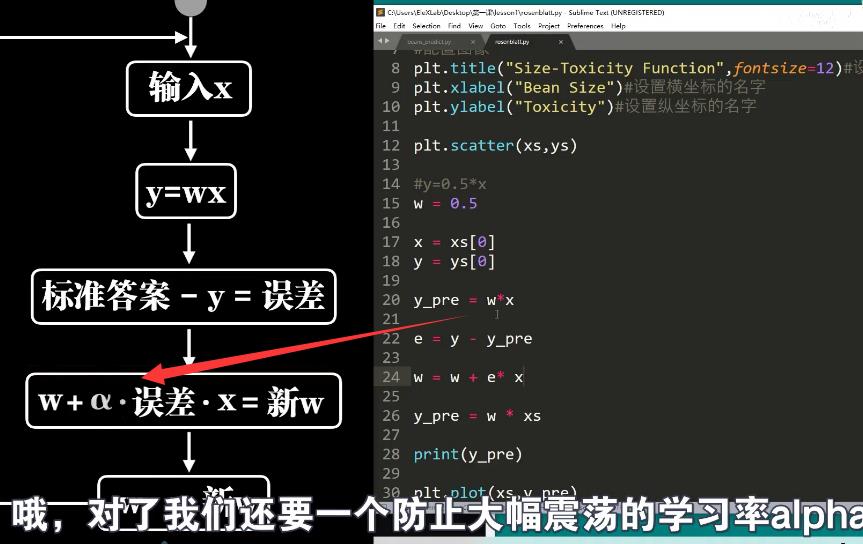
整个流程为
通过输入已有x坐标 根据y=wx
计算出来标准答案 然后根据y的坐标知道误差
用: w + 误差*x =新w
这里你可能会疑惑,为什么是误差*x 因为
当预测函数为负数的时候 需要增大 而不是减少。和正数的时候截然相反
所以通过
w + 误差*x =新w 事情就被巧妙的解决了
一个流程就是这样的
x = xs[0]
y = ys[0]
y_pre = w * x
e = y - y_pre
alpha = 0.05
w = w + alpha * e * x循环起来就是这样的
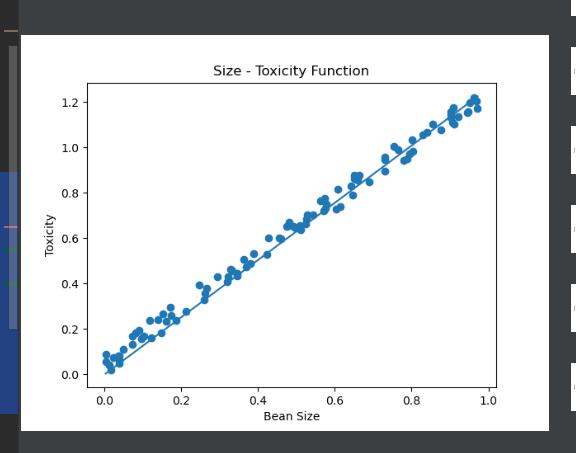
# 一百次的参数调整
for m in range(beansSize):
# 一次的参数调整
for i in range(beansSize):
x = xs[i]
y = ys[i]
y_pre = w * x
e = y - y_pre
alpha = 0.05
w = w + alpha * e * x
print(w)总得效果就是这样的
以上是关于2机器学习实现 Rosenblatt 感知器的主要内容,如果未能解决你的问题,请参考以下文章