车间调度基于matlab模拟退火算法求解车间调度(jobshop-3)问题含Matlab源码 1082期
Posted 紫极神光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了车间调度基于matlab模拟退火算法求解车间调度(jobshop-3)问题含Matlab源码 1082期相关的知识,希望对你有一定的参考价值。
一、车间调度简介
1 车间调度定义
车间调度是指根据产品制造的合理需求分配加工车间顺序,从而达到合理利用产品制造资源、提高企业经济效益的目的。车间调度问题从数学上可以描述为有n个待加工的零件要在m台机器上加工。问题需要满足的条件包括每个零件的各道工序使用每台机器不多于1次,每个零件都按照一定的顺序进行加工。
2 传统作业车间调度
传统作业车间带调度实例
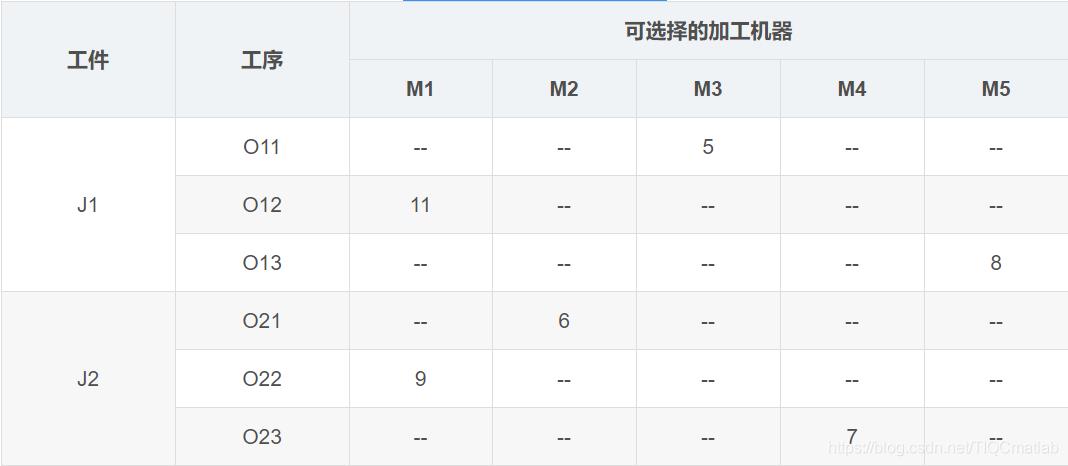
有若干工件,每个工件有若干工序,有多个加工机器,但是每道工序只能在一台机器上加工。对应到上面表格中的实例就是,两个工件,工件J1有三道工序,工序Q11只能在M3上加工,加工时间是5小时。
约束是对于一个工件来说,工序的相对顺序不能变。O11->O12->O13。每时刻,每个工件只能在一台机器上加工;每个机器上只能有一个工件。
调度的任务则是安排出工序的加工顺序,加工顺序确定了,因为每道工序只有一台机器可用,加工的机器也就确定了。
调度的目的是总的完工时间最短(也可以是其他目标)。举个例子,比如确定了O21->O22->O11->O23->O12->O13的加工顺序之后,我们就可以根据加工机器的约束,计算出总的加工时间。
M2加工O21消耗6小时,工件J2当前加工时间6小时。
M1加工O22消耗9小时,工件J2当前加工时间6+9=15小时。
M3加工O11消耗5小时,工件J1当前加工时间5小时。
M4加工O23消耗7小时,工件J2加工时间15+7=22小时。
M1加工O12消耗11小时,但是要等M1加工完O22之后才开始加工O12,所以工件J1的当前加工时间为max(5,9)+11=20小时。
M5加工O13消耗8小时,工件J2加工时间20+8=28小时。
总的完工时间就是max(22,28)=28小时。
2 柔性作业车间调度
柔性作业车间带调度实例(参考自高亮老师论文
《改进遗传算法求解柔性作业车间调度问题》——机械工程学报)

相比于传统作业车间调度,柔性作业车间调度放宽了对加工机器的约束,更符合现实生产情况,每个工序可选加工机器变成了多个,可以由多个加工机器中的一个加工。比如上表中的实例,J1的O12工序可以选择M2和M4加工,加工时间分别是8小时和4小时,但是并不一定选择M4加工,最后得出来的总的完工时间就更短,所以,需要调度算法求解优化。
相比于传统作业车间,柔性车间作业调度的调度任务不仅要确定工序的加工顺序,而且需要确定每道工序的机器分配。比如,确定了O21->O22->O11->O23->O12->O13的加工顺序,我们并不能相应工序的加工机器,所以还应该确定对应的[M1、M3、M5]->[M1、M2、M3]->[M1、M2、M3、M4、M5]->[M2、M3、M4、M5]->[M2、M4]->[M1、M3、M4、M5]的机器组合。调度的目的还是总的完工时间最短(也可以是其他目标,比如机器最大负荷最短、总的机器负荷最短)
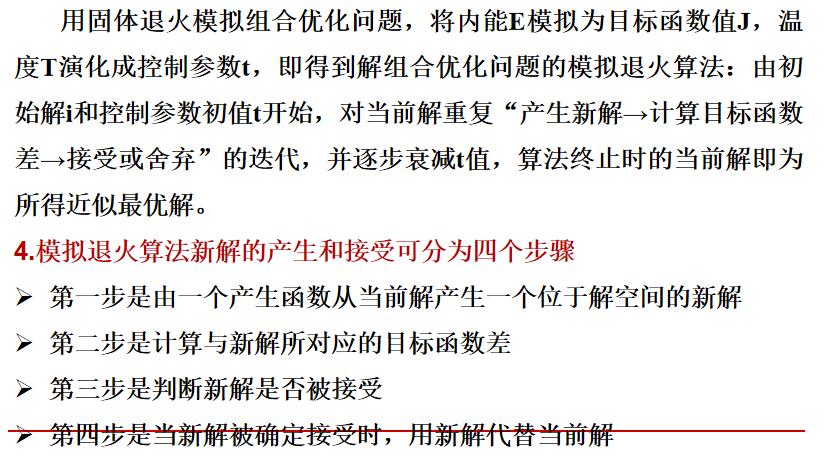
二、模拟退火算法简介

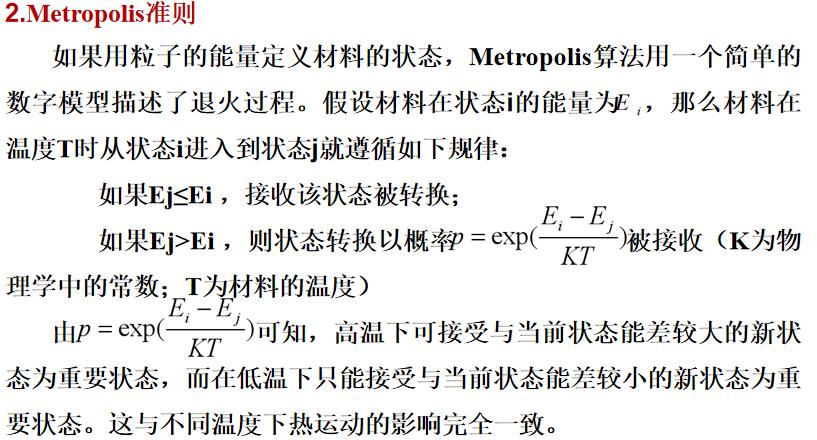

5 模拟退火算法的参数
模拟退火是一种优化算法,它本身是不能独立存在的,需要有一个应用场合,其中温度就是模拟退火需要优化的参数,如果它应用到了聚类分析中,那么就是说聚类分析中有某个或者某几个参数需要优化,而这个参数,或者参数集就是温度所代表的。它可以是某项指标,某项关联度,某个距离等等。
三、部分源代码
clc
clear
%=========数据录入,参数调整=================
swarminitNum=20;%初始生成的粒子数;
MM=[1 2 3 4 5 6
6 6 6 6 6 6];%工件、工序数量矩阵,MM第一行表示工件,第二行表示每个工件的工序数;
machineNum=6; %加工机器数;
initT=500; %模拟退火初始温度;
gen=1000; %循环迭代数;
w1=0.35; %变异率;
changeNum=3; %变异变换对数;
restrictmatrixM=[3 1 2 4 6 5
2 3 5 6 1 4
3 4 6 1 2 5
2 1 3 4 5 6
3 2 5 6 1 4
2 4 6 1 5 3];%job-shop机器约束矩阵;
restrictmatrixT=[1 3 6 7 3 6
8 5 10 10 10 4
5 4 8 9 1 7
5 5 5 3 8 9
9 3 5 4 3 1
3 3 9 10 4 1];%job-shop时间约束矩阵;
%===============PSO算法==========================
swarminit=cell(1,swarminitNum);
swarminitLong=sum(MM(2,:)); %所有工序数即粒子长度;
for i=1:swarminitNum,
swarminit{i}=randomparticle(MM) ;
end %随机生成初始粒子群体
[popu,s] = size(swarminit);
trace = ones(1,gen);
trace(1) = 10000; % 初始全局最佳适应度设为足够大
for i = 1:s,
bestfit(i) = 10000; % 初始个体历史最佳适应度设为足够大
end
bestpar = swarminit; % 个体历史最佳粒子初始化
for u=1:swarminitNum,
fitlist=[0];
end
T=initT;
for step = 1:gen,
for q=1:swarminitNum,
fitlist(q)=timedecode(swarminit{q},restrictmatrixM,restrictmatrixT,machineNum) ;
end % 计算当前粒子群每个粒子的适应度
[minval,sub] = min(fitlist); % 求得这代粒子的适应度最小值及其下标
if(trace(step) > minval) ,
trace(step) = minval;
bestparticle = swarminit{sub};
end
if(step~= gen) ,
trace(step + 1) = trace(step); % 全局最佳适应度及最佳粒子调整
end
T=0.97*T;
for i = 1:s,
tt=fitlist(i)-bestfit(i);
if(tt<0)|(min(1,exp(-tt/T))>=rand(1,1));
bestfit(i) = fitlist(i);
bestpar{i} = swarminit{i};
end
end % 个体历史最佳粒子及适应度调整 ;
for j = 1:s,
if rand(1,1)<w1,
bestparticle1=bianyi(bestparticle,changeNum,swarminitLong);
else
bestparticle1=bestparticle;
end %粒子变异;
l1=1000;
l2=1;
l3=1000;
l4=1;
while (l1-l2)>swarminitLong,
m=fix(swarminitLong*rand(1,1));
n=fix(swarminitLong*rand(1,1));
l1=max(m,n)+1;
l2=min(m,n)+1;
end
while (l3-l4)>swarminitLong,
m1=fix(swarminitLong*rand(1,1));
n1=fix(swarminitLong*rand(1,1));
l3=max(m1,n1)+1;
l4=min(m1,n1)+1;
end
swarminit{j}=cross(bestpar{j},swarminit{j},l2,l1);
swarminit{j}=cross(bestparticle1,swarminit{j},l4,l3);%粒子交叉;
end
end
function gant(particle,swarminitLong,restrictmatrixM,restrictmatrixT,b)
%particle=[1.0 1.0 3.0 2.0 3.0 4.0 2.0 6.0 4.0 3.0 1.0 6.0 5.0 5.0 6.0 4.0 3.0 2.0 4.0 3.0 2.0 5.0 4.0 6.0 1.0 2.0 1.0 5.0 5.0 6.0 1.0 4.0 2.0 6.0 3.0 5.0];
% restrictmatrixM=[ 3 1 2 4 6 5
% 2 3 5 6 1 4
% 3 4 6 1 2 5
% 2 1 3 4 5 6
% 3 2 5 6 1 4
% 2 4 6 1 5 3];
%restrictmatrixT= [ 1 3 6 7 3 6
% 8 5 10 10 10 4
% 5 4 8 9 1 7
% 5 5 5 3 8 9
% 9 3 5 4 3 1
% 3 3 9 10 4 1];
% swarminitLong=36;
for i=1:6
counter(i)=[1] ; %位置计数器
s(i)=[0] ; %工件上一工序结束时间
t(i)=[0] ; %机器上一工序结束时间
end
for j=1:swarminitLong,
k=particle(j);
time(k,counter(k))=restrictmatrixT(k ,counter(k)) ;
%时间矩阵解码
machine(k,counter(k))=restrictmatrixM(k,counter(k));
%机器矩阵解码
[rom]=max( s(k), t(machine(k,counter(k))) );
s(k)=rom+time(k,counter(k));
t(machine(k,counter(k)))=rom+time(k,counter(k));
%计算每台机器上加工时间
%生成甘特图
x=[rom t(machine(k,counter(k)))];
y=[machine(k,counter(k)) machine(k,counter(k))];
x1=[t(machine(k,counter(k)))-0.1 t(machine(k,counter(k)))];
y1=[machine(k,counter(k)) machine(k,counter(k))];
plot(x,y,'LineWidth',7.5,'Color','k');
hold on
plot(x1,y1,'LineWidth',7.5,'Color','white');
hold on
a=k*10+counter(k);
text((rom+t(machine(k,counter(k))))/2-1,machine(k,counter(k))-0.5,num2str(a)) ;
% text((rom+t(machine(k,counter(k))))/2-1,machine(k,counter(k))-0.5,num2str(a)) ;
hold on
axis([0 b+5 0 7]) ;
counter(k)=counter(k)+1 ;
end
xlabel('time(minute)');
ylabel('machine');
title('甘特图');
四、运行结果

五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.
以上是关于车间调度基于matlab模拟退火算法求解车间调度(jobshop-3)问题含Matlab源码 1082期的主要内容,如果未能解决你的问题,请参考以下文章