基于 ETC 专用短程通信的车路协同 第 1 部分:应用集及应用数据交互需求
Posted 爱是与世界平行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于 ETC 专用短程通信的车路协同 第 1 部分:应用集及应用数据交互需求相关的知识,希望对你有一定的参考价值。
本站文章引用或转载写明来源,感谢原作者的辛苦写作,如果有异议或侵权,及时联系我处理,谢谢!
更多车路协同,车路协同建设解决方案,参考链接:https://gitee.com/AiShiYuShiJiePingXing/smart-city
-
个人网站:https://www.lovebetterworld.com/
-
QQ:1090239782
-
微信:lovebetterworld
-
公众号:爱是与世界平行

基于 ETC 专用短程通信的车路协同第 1 部分:应用集及应用数据交互需求
1 范围
本文件定义了基于专用短程通信(5.8GHz DSRC(ETC))的车路协同(I2V)系列应用,以及数据交互需求等内容。
本文件适用于基于5.8GHz DSRC系统的应用场景开发、验证及商用。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 2312 信息交换用汉字编码字符集 基本集
GB 5768.2—2009 道路交通标志和标线 第2部分:道路交通标志
GB/T 27957—2011 冰雹等级
GB/T 27967—2011 公路交通气象预报格式
GB/T 29100—2012 道路交通信息服务 交通事件分类与编码
GB/T 31024.1—2014 合作式智能运输系统 专用短程通信 第1部分:总体技术要求
T/ITS 0058—2017 合作式智能运输系统 车用通信系统 应用层及应用数据交互标准
3 术语和定义
GB/T 31024.1—2014、T/ITS 0058—2017界定的以及下列术语和定义适用于本文件。
3.1 定义
3.1.1主车 host vehicle
装有车载单元且运行应用程序的目标车辆。
[来源:T/ITS 0058—2017,3.1.3]
3.1.2车载单元 on-board unit
安装在车辆上的可实现ETC2.0(3.1.5)通讯,支持ETC2.0(3.1.5)应用的硬件单元。
[来源:GB/T 31024.1—2014,2.3,有修改]
3.1.3路侧单元 road side unit
安装在路侧的可实现ETC2.0通讯,支持ETC2.0应用的硬件单元。
[来源:GB/T 31024.1—2014,2.4,有修改]
3.1.4广播 broadcast
路侧单元(3.1.3)以广播地址发出信息,面向车载单元(3.1.2)且不需要车载单元(3.1.2)回 复的通信应用
3.1.5专用短程通信 dedicate short range communication
专门用于道路环境的车辆与车辆、车辆与基础设施、基础设施与基础设施间,通信距离有限的无线通信方式,是智能运输系统领域中的基础通信方式之一。
[来源:GB/T 31024.1—2014,2.2]
3.1.6车路协同 vehicle-infrastructure cooperative system
基于无线通信、传感探测等技术进行车路信息获取,通过车车、车路信息交互和共享,实现车辆与基础设施之间智能协同与配合,以及车辆与其它交通要素之间的通信,从而形成的安全、高效、环保和信息服务类的道路交通系统。
3.1.7基于ETC专用短程通信的车路协同 vehicle-infrastructure cooperative system based on Electronic Toll Collection (ETC) dedicated short range communication
基于ETC专用短程通信(5.8GHz DSRC)的车路协同,即基于ETC实现的车辆与基础设施之间,及车辆与其它交通要素之间的通信,可实现交通安全、效率、信息服务类的应用场景。
3.1.8系统延迟 system delay
用于规范各应用场景中的基本性能要求,从路侧单元发送通信数据,到车端接收数据并通过网络层进行信息处理后传递给应用层的时间。
[来源:T/ITS 0058—2017,3.1.2,有修改]
3.2 缩略语
以下缩略语适用于本文件:
DE:数据元素(Data Element)
DF:数据帧(Data Frame)
DSRC:专用短程通信(Dedicate Short Range Communication)
ETC:电子收费(Electronic Toll Collection)
ETC2.0:基于ETC专用短程通信的车路协同(Vehicle-Infrastructure Cooperative System Based On Electronic Toll Collection(ETC) Dedicated Short Range Communication)
HMI:人机交互界面(Human Machine Interface)
HV:主车(Host Vehicle)
I2V:路侧设施与车载单元通讯(Infrastructure to Vehicle)
MEC:边缘计算(Multi-Access Edge Computing)
OBU:车载单元(On-Board Unit)
OBE-SAM:车载设备安全访问模块(On-board Equipment Security Access Module)
P:周边行人(Pedestrian)
RSU:路侧单元(Road Side Unit)
4 ETC2.0 系统总体架构
相对于单纯用于收费的 ETC 系统,ETC2.0 需要进行实时预警或服务消息的推送,如面向安全类车路协同应用的路侧预警消息发布。因此,系统架构中除了传统 ETC RSU(支持 ETC2.0)之外,还可能需要包括如路侧感知、MEC 等子系统。ETC2.0 系统总体架构见图 1:
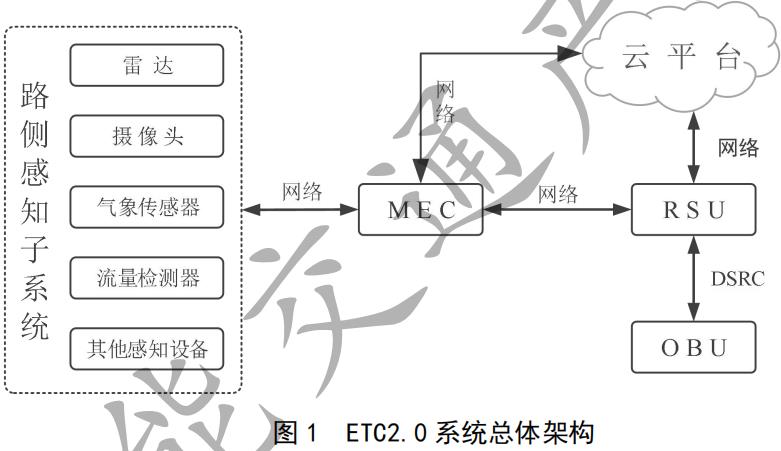
ETC2.0 系统各子系统介绍如下:
a) 路侧感知子系统:检测交通流状况及异常交通事件,如车辆逆行、行人闯入机动车道、违法停车、交通拥堵、交通事故、危险气象状况(横风、团雾、暴雨)、道路施工等,可使用多种传感器如摄像头、雷达、气象传感器等;
b) MEC:边缘计算大脑,处理传感器收集的数据,形成实时决策;也可接收云平台下发的数据,进行综合逻辑判断;
c) RSU:这里是指 ETC 天线,可支持 ETC2.0 应用场景;
d) OBU:这里是指智能 OBU,可支持 ETC2.0 应用场景;
e) 云平台:大数据汇集中心,可实现交通数据汇集及分析。支持设备状态管理、交通事件管理、大数据分析、交通调度信息发布等。可以基于现有的交通云控平台建设。
注:ETC 通信特点是能实现断面覆盖。由于交通流具有方向性,因此只要保证车辆以一定速度经过 RSU 所在断面时,能接收到 RSU 发送的消息即可实现信息传递。
5 基于 ETC 专用短程通信的车路协同应用
5.1 需求分析
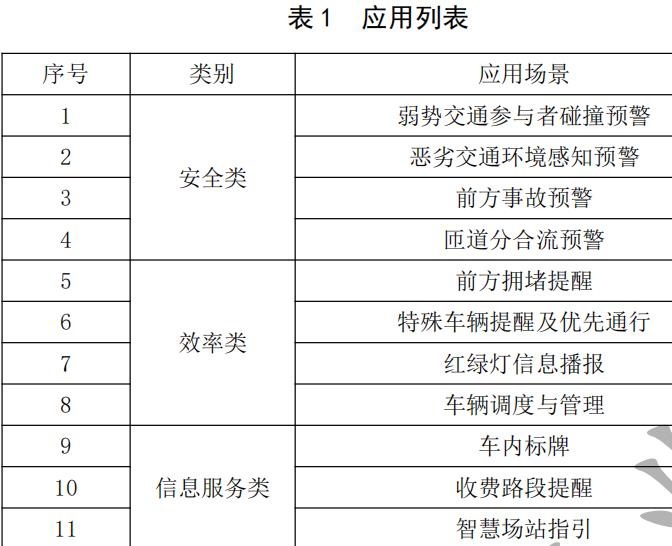
本文件选取涵盖安全、效率、信息服务三个类别,十一个典型车路协同(I2V)应用场景。
5.2 应用定义及基本要求
5.2.1 总则
本节从应用定义、主要场景、基本工作原理、通信方式、基本性能要求、数据交互需求六个方面对该标准定义的I2V应用分别进行描述。
5.2.2 弱势交通参与者碰撞预警
5.2.2.1 应用定义和预期效果
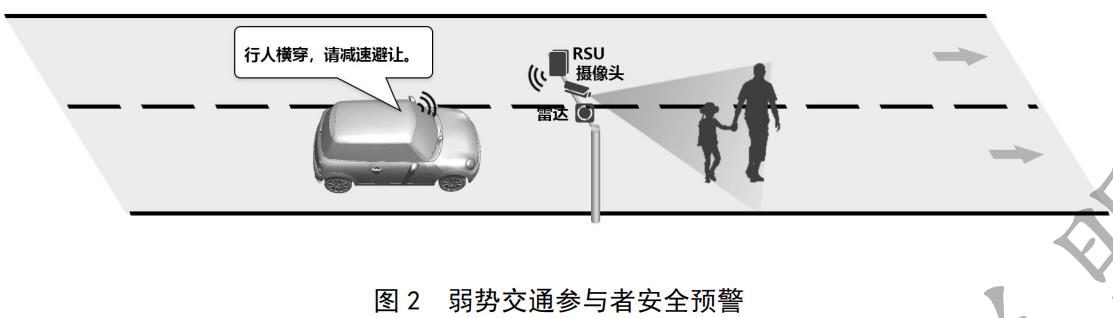
弱势交通参与者碰撞预警是指,车辆在行驶中,与 P(含义拓展为广义上的弱势交通参与者,包括行人、自行车、电动自行车等,以下描述以行人为例)存在碰撞危险时,该应用将对车辆驾驶员进行预警。本应用适用于城市及郊区普通道路及公路的碰撞危险预警。
弱势交通参与者碰撞预警应用可以辅助驾驶员避免或降低与前方行人碰撞危险,提高车辆及行人通行安全。
5.2.2.2 主要场景
弱势交通参与者碰撞预警主要场景描述如下:
a) 车辆在行进时,路侧感知子系统检测到 P 从侧前方出现,车辆驾驶员的视线可能被出现在路边的其他车辆或遮挡物遮挡;
b) 车辆需装配 ETC2.0 OBU,能够接收及播报由 RSU 发送的消息提醒,P 是否具备短程无线通信能力不影响应用场景的有效性;
c) 车辆接近 P 时,RSU 将路侧感知子系统检测到的行人信息发送给 OBU,对驾驶员进行预警, 提醒驾驶员与前方 P 存在碰撞危险;
d) 车辆驾驶员收到预警后,采取减速或变道等措施,避免与 P 发生碰撞。
注:由于 OBU 与 RSU 的通信距离有限,该场景主要适用于一些经常发生弱势交通参与者碰撞事故的重点路段,如高速公路上常发生行人违规穿越的区域等。感知系统与 RSU 可以分开布设,例如,感知系统布设在事故多发点,而 RSU布设在事故多发点之前一定距离处,以提前通知车辆进行避让。
5.2.2.3 基本工作原理
弱势交通参与者碰撞预警基本工作原理如下:
a) 路侧感知子系统识别行人(P),通过 MEC 分析并筛选出与车辆行驶方向上可能发生冲突的行人;
b) MEC 将路侧感知子系统检测到的行人经纬度坐标信息转化为 RSU 与行人的距离(车辆行驶方向直线距离);
c) 若存在多个威胁行人(或行人组),则筛选出最紧急的威胁行人(或行人组);
d) 系统将行人位置信息通过 RSU 进行广播,对车辆驾驶员进行相应的碰撞预警。
5.2.2.4 通信方式
OBU 和 RSU 需要具备短程无线通信能力,利用路侧感知设备对行人信息进行感知,通过 RSU 将行人信息发给车辆。
5.2.2.5 基本性能要求
弱势交通参与者碰撞预警基本性能要求如下:
——车速≤130 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——系统延迟<100 ms。
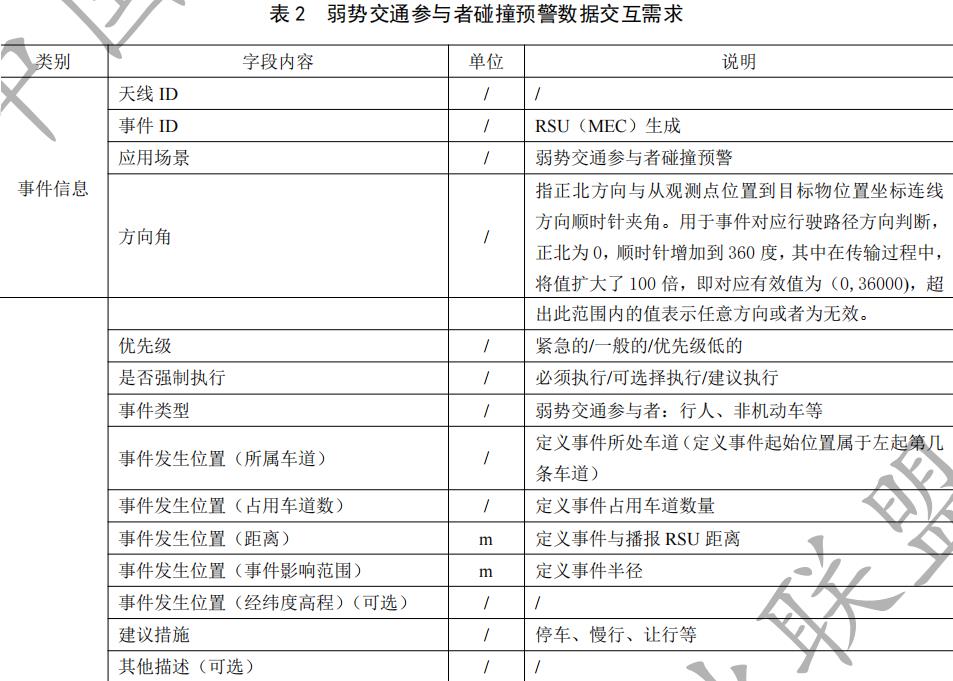
5.2.2.6 数据交互需求
表 2 弱势交通参与者碰撞预警数据交互需求
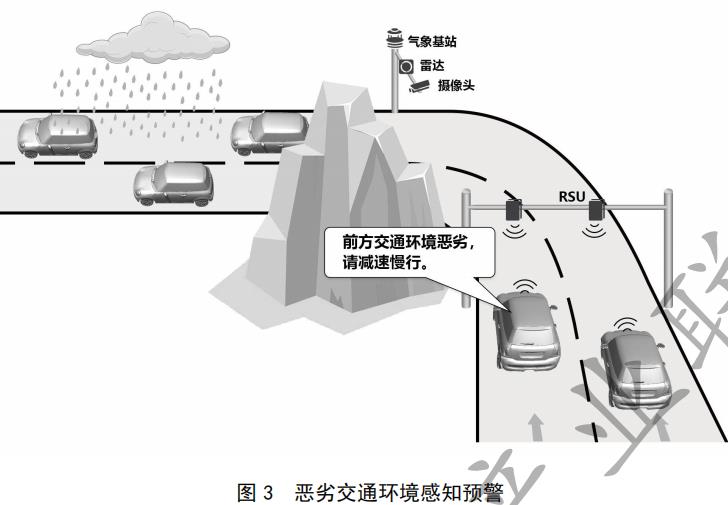
5.2.3 恶劣交通环境感知预警
5.2.3.1 应用定义和预期效果
恶劣交通环境感知预警是指,车辆行驶过程中遇到恶劣交通环境(恶劣天气、危险路段等),存在发生事故风险时,系统启动相应的安全预警及诱导功能,保障行驶车辆在恶劣交通环境情况下的安全顺利通行。本应用适用于城市道路、郊区道路和高速公路等容易发生危险状况的路段或者临时性存在道路危险状况的路段。
5.2.3.2 主要场景
当路侧感知子系统(如摄像头、气象检测器等)检测到当前路段出现恶劣交通环境后(恶劣气象环境、危险路段等),该信息通过 MEC 处理后由 RSU 播报,提醒即将驶入该路段车辆谨慎驾驶,以保障行驶安全。恶劣交通环境预警包括如下主要场景:
a)行车方向较远处有恶劣交通环境情形
路侧感知子系统检测到车辆行进方向较远处有恶劣交通环境(如大雾、横风、冰雹、封路施工等),RSU 对外广播交通环境信息,包括:位置、危险描述等,提醒即将行经该区域的车辆及时采取避让措施,如改变行驶路径避免驶入危险路段等,减轻事故风险;
b)行车方向不远处有危险路段情形
路侧感知子系统检测到路段不远处前方有危险路段情形(如地面抛洒物、隧道积水、路面湿滑、急转弯等)发生时,RSU 对驶近该危险路况点的车辆驾驶员发出安全预警,提醒驾驶员提前采取应急措施,如减速慢行、变道行驶等,防止安全事故发生。由于 RSU 的有效通信距离受限,该类提醒多布设在事故多发处。
5.2.3.3 基本工作原理
恶劣交通环境预警基本工作原理如下:
a) 路侧感知子系统识别恶劣交通环境信息,通过 MEC 分析并判断事件类型及影响范围;
b) MEC 进一步判断并筛选出事件发生位置附近路段信息,从该路段行驶过来的车辆在一定时间范围内可能会受到事件影响;
c) 计算事件发生地与附近受影响路段布设的 RSU 的距离,结合路段信息判断可能的避险措施;
d) 针对受影响的路段所处不同位置,发出相应的避险提醒:如车辆离事件较远时 RSU 广播车辆提前变换行驶路径指引信息,对相对事件较近处车辆发出减速避险等警示。
5.2.3.4 通信方式
OBU 和 RSU 需要具备短程无线通信能力,利用路侧感知子系统对恶劣路况环境信息进行感知,经过 MEC 运算决策后,通过 RSU 将警示信息发给车辆(I2V)。
5.2.3.5 基本性能要求
恶劣交通环境预警基本性能要求如下:
——车速≤130 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——系统延迟<100 ms。
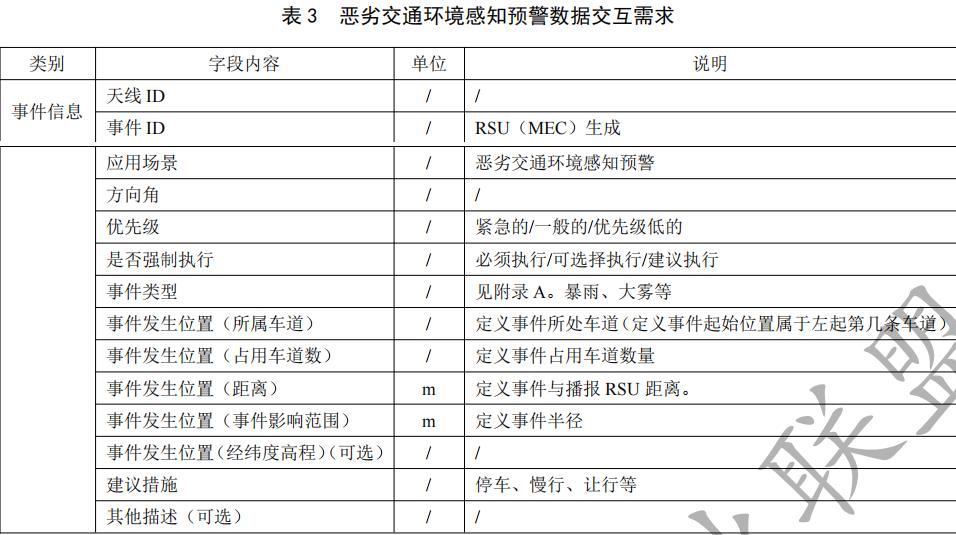
5.2.3.6 数据交互需求
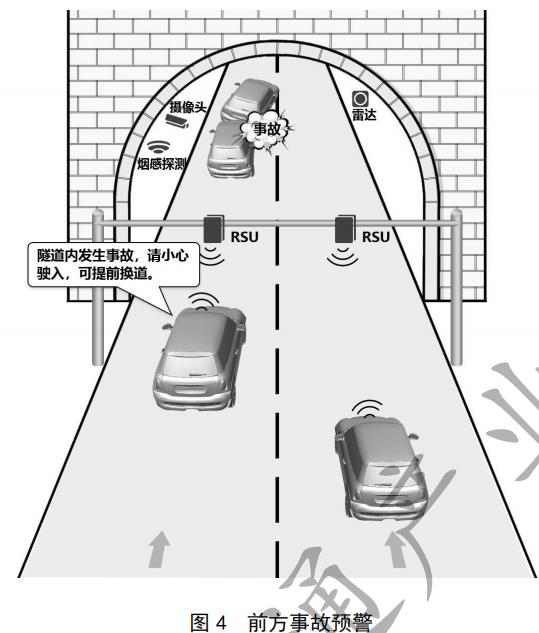
5.2.4 前方事故预警
5.2.4.1 应用定义和预期效果
前方事故预警是指,当路侧感知子系统(摄像头、雷达等)监测到车辆行驶路段前方发生交通事故信息时,该应用对车辆驾驶员进行预警,提醒同向车辆减速避让,防止二次事故发生。本应用适用于城市及郊区普通道路及高速公路的事故预警。
5.2.4.2 主要场景
前方事故预警主要场景如下:
a) 路侧感知子系统检测到车辆行进前方发生交通事故,车辆驾驶员的视线可能被出现在路边遮挡物遮挡或当前车速较快;
b) 车辆需装配 OBU,能够接收及播报由 RSU 发送的消息提醒;
c) 当车辆接近事故地点时,RSU 将路侧传感设备检测到的事故信息发送给 OBU,对驾驶员进行预警,提醒驾驶员与前方事故存在碰撞危险;
d) 车辆驾驶员收到预警后,采取减速或变道等措施,避免发生二次事故。
5.2.4.3 基本工作原理
前方事故预警基本工作原理如下:
a) 路侧感知子系统识别交通事故信息,通过 MEC 分析判断事件类型及影响范围;
b) MEC 分析、计算事件发生地与附近受影响路段的 RSU 位置、距离等信息,结合事件信息判断可能的避让措施;
c) RSU 将该事故信息及建议措施进行播报,提醒驾驶员减速行驶或变道避让。
5.2.4.4 通信方式
OBU 和 RSU 需要具备短程无线通信能力,利用路侧感知子系统对事故信息感知,经 MEC 运算决策后,由 RSU 将预警信息广播给车辆(I2V)。
5.2.4.5 基本性能要求
前方事故预警基本性能要求如下:
——车速≤130 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——系统延迟<100 ms。
5.2.4.6 数据交互需求

5.2.5 匝道分合流预警
5.2.5.1 应用定义和预期效果
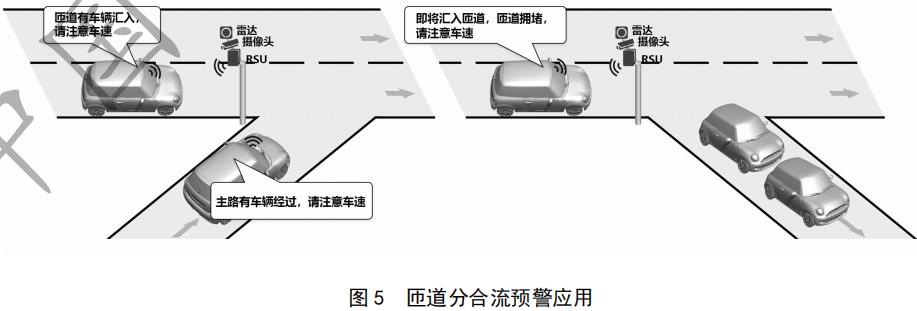
匝道分合流预警是指,当车辆即将从匝道汇入主路或从主路驶入匝道时,给予车辆相应的安全预警,减少匝道分合流区域事故的发生。
5.2.5.2 主要场景
当路侧感知子系统(如摄像头、雷达等)检测到匝道处有主路车辆驶出或匝道车辆汇入时,RSU对驶近匝道口的车辆广播分合流信息,提醒车辆驾驶员注意避让。匝道分合流预警包括如下主要场景:
a)匝道汇入主路
当路侧感知子系统(如摄像头、雷达等)检测到匝道合流区主道有车经过时,通知匝道车辆减速慢行;对匝道上的车辆进行检测,如果检测到匝道上有车辆通行时,对经过合流区主道最右侧车道的车辆进行预警。
b)主路驶入匝道
当主道车辆准备变道驶入匝道,如果匝道发生拥堵,则通知主道车辆进行减速慢行。
5.2.5.3 基本工作原理
通过路侧感知子系统(如摄像头、雷达等)对匝道分合流区域进行监测,当发现有碰撞风险时,向过往车辆进行预警。
5.2.5.4 基本性能要求
匝道分合流预警基本性能要求如下:
——车速≤130 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——系统延迟<100 ms。
5.2.5.5 通信方式
OBU 和 RSU 需具备短程无线通信能力,RSU 将分合流预警信息发送给分合流区车辆(I2V)。
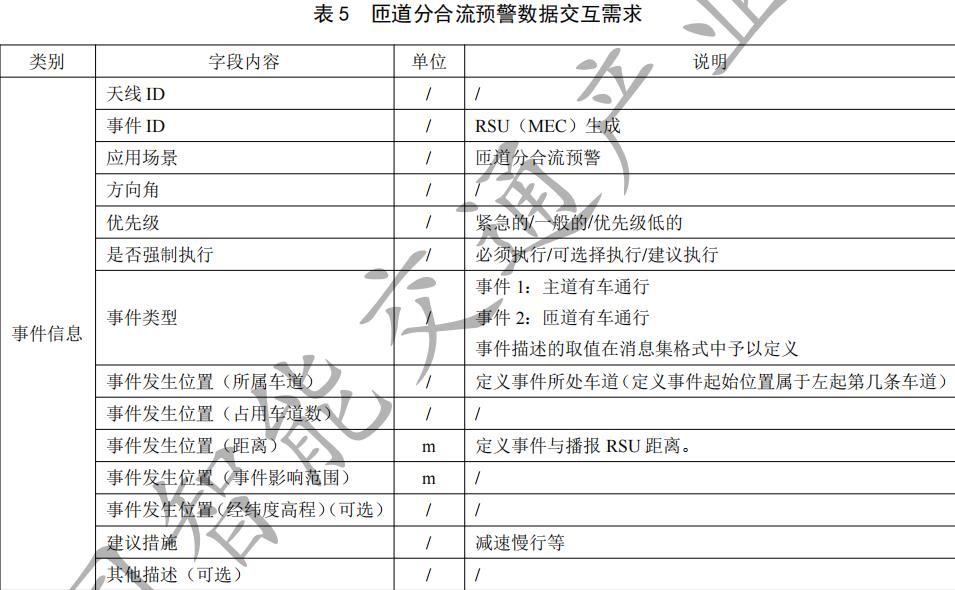
5.2.5.6 数据交互需求
5.2.6 前方拥堵提醒
5.2.6.1 应用定义和预期效果
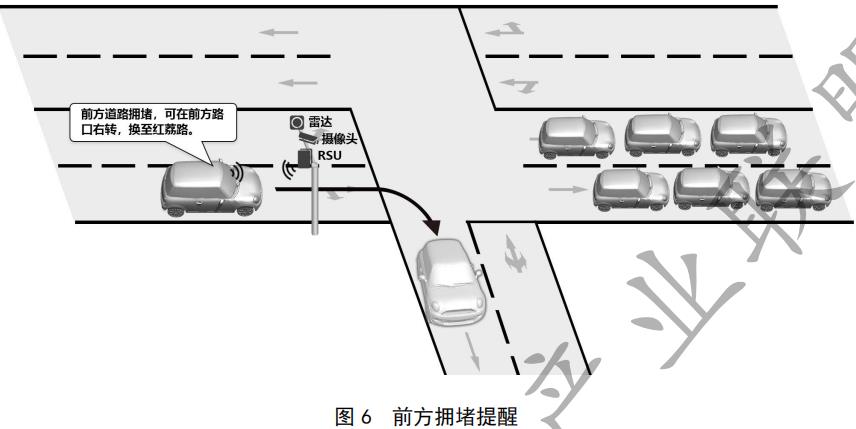
前方拥堵提醒是指,当车辆行驶方向发生交通拥堵状况时,该应用通过将该信息提前播报给车辆驾驶员,驾驶员根据信息提示可在到达拥堵路段前提前改变当前行驶路线,减轻交通压力,提高通行效率。
本应用适用于城市及郊区普通道路及高速公路拥堵路段的预警。
5.2.6.2 主要场景
路侧传感设备检测到车辆行驶前方发生交通拥堵,将该拥堵信息通过 MEC 上传云平台;云平台收到拥堵信息后,判断其拥堵情况,并将该信息下发到拥堵路段附近 RSU 进行对外广播,提醒驾驶员前方拥堵;驾驶员可结合自身情况选择继续沿当前道路行驶或改变行驶路线。
5.2.6.3 基本工作原理
前方拥堵提醒基本工作原理如下:
a) 路侧传感设备(如摄像头、雷达等)检测到当前路段车辆缓行或拥堵后,将拥堵信息(如拥堵位置)上传至云平台;
b) 云平台分析当前拥堵情况,筛选出即将汇入该拥堵路段的车道及 RSU;
c) 云平台向筛选出的路段 RSU 下发前方路段拥堵信息,RSU 收到信息后对驶入天线覆盖范围内的车辆广播该拥堵信息;
d) 车辆驾驶员收到信息后,结合自身情况判断是否按当前路段继续行驶或改变行驶路径;
e) 该信息需要在离拥堵路段较远处进行播报,给车辆驾驶员预留足够时间换道行驶,避免造成拥堵加剧。
5.2.6.4 基本性能要求
前方拥堵提醒基本性能要求如下:
——车速≤130 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——系统延迟<100 ms。
5.2.6.5 通信方式
OBU 和 RSU 需具备短程无线通信能力,RSU 将拥堵信息发送给车辆(I2V)。
5.2.6.6 数据交互需求

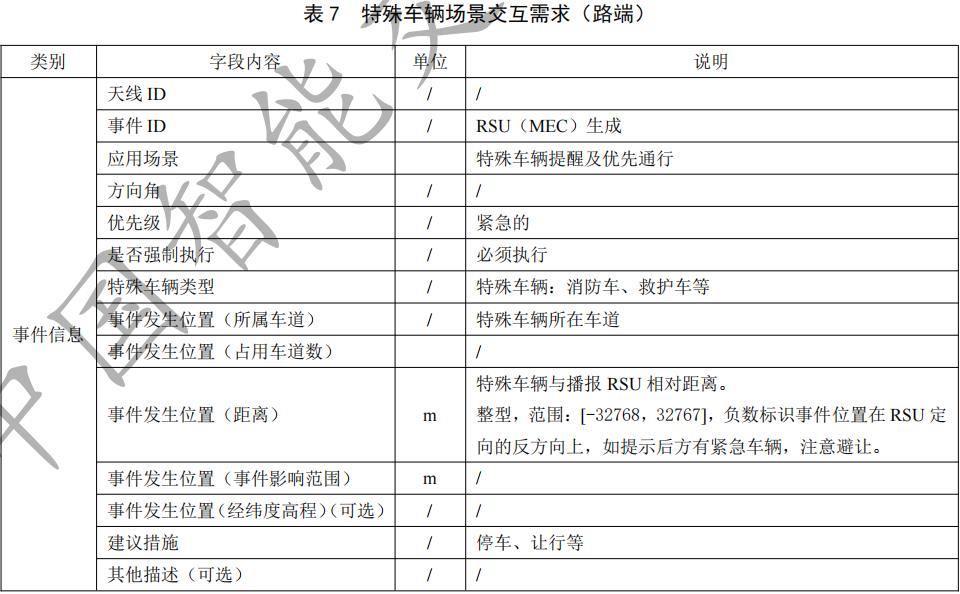
5.2.7 特殊车辆提醒及优先通行
5.2.7.1 应用定义和预期效果
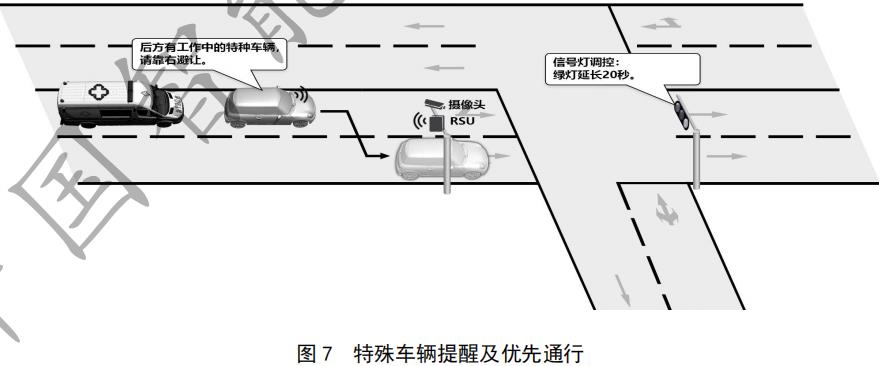
特殊车辆提醒及优先通行是指,当 RSU 识别工作状态下的特殊车辆(如救护车、警车、消防车等)时,调整交通信号灯相位信息,并对附近行驶普通车辆进行广播提醒(可选动作),实现优先通行。
5.2.7.2 主要场景
RSU识别到工作状态下的特殊车辆,通过路侧感知子系统检测、定位该特殊车辆,分析其所处车道、距离等信息,并将该信息通过RSU广播给附近车辆,提醒周围车辆让行;同时,结合当前交叉口(道路)的红绿灯相位信息,调整红灯状态或延长绿灯时间,使特殊车辆快速通过。
注:由于 ETC OBU 目前不能进行车车通信,该场景的实现分为两个步骤:一是通过 RSU 与特殊车辆的通信识别特殊车辆身份;该 RSU 布设在需要信号灯协同的路口之前一定距离,以及时检测特殊车辆。二是 RSU 将采集到的信息传送给路侧系统的其它设施,如传送给信号灯进行配时调整;传送给可变情报板等设备以通知其它车辆进行让行;或者传送给其它位置的 RSU 以通过车路通信的方式通知其它车辆。
5.2.7.3 基本工作原理
特殊车辆提醒及优先通行基本工作原理如下:
a) 特殊车辆驾驶员通过 OBU 设置将车辆调整为工作状态;
b) 当特殊车辆驶入 RSU 覆盖范围内时,RSU 通过读取 OBU 内容识别车辆类型及当前工作状态;
c) 路侧传感设备定位特殊车辆所处位置(与 RSU 车道方向距离、所处车道等);
d) MEC 分析、处理收到的特殊车辆位置信息后该信息通过本 RSU 或附近其它 RSU 对外广播(可选);
e) 普通车辆驾驶员收到 RSU 播报的特殊车辆位置信息后,根据当前自身所处车道进行变道,给特殊车辆让出行驶车道;
f) MEC 将特殊车辆信息发送信号控制器,信号灯控制器结合 MEC 发送的特殊车辆信息,调整当前红绿灯相位状态,让特殊车辆快速通行。
5.2.7.4 基本性能要求
特殊车辆提醒及优先通行基本性能要求如下:
——车速≤70 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——系统延迟<100 ms。
5.2.7.5 通信方式
OBU 和 RSU 需具备短程无线通信能力,RSU 将信号灯信息发送给车辆(I2V)。
5.2.7.6 数据交互需求

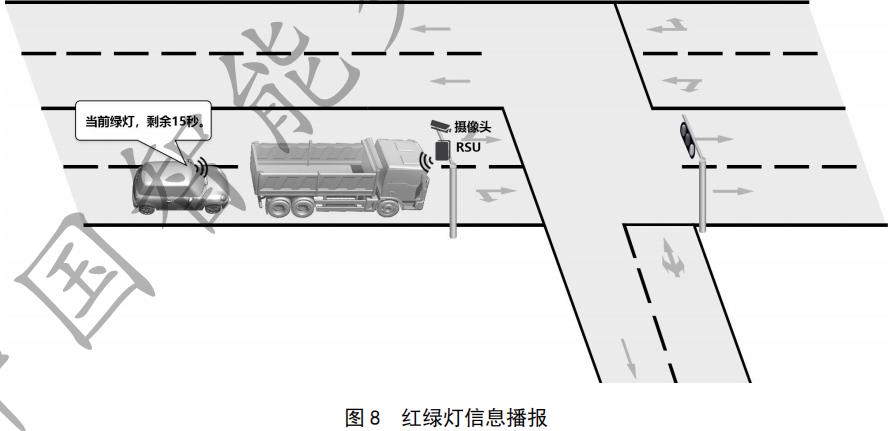
5.2.8 红绿灯信息播报
5.2.8.1 应用定义和预期效果
红绿灯信息播报是指,车辆经过有信号控制的交叉口(车道),RSU向车辆发送当前红绿灯相位信息,防止车辆因视线遮挡导致误闯红灯。
本应用适用于城市及郊区道路及公路的交叉路口、环道出入口和可控车道、高速路入口和隧道等有信号控制的车道。
此场景要求RSU布设于每个接近红绿灯方向道路的路侧,即能对每个接近红绿灯方向的车辆进行红绿灯信息播报。
5.2.8.2 主要场景
当车辆即将通过有红绿灯的交叉路口、车道时,红绿灯信息播报应用将当前路口红绿灯信息(如灯色信息、剩余时间等)对车辆驾驶员进行播报,车辆驾驶员结合收到的信息自行判断安全通过或减速停车,避免有前方大车遮挡视线或恶劣天气影响视线,或由于其他原因,导致误闯红灯的情形。同时,该场景也可以应用于自动驾驶车辆,帮助车辆获取信号灯配时信息。
5.2.8.3 基本工作原理
红绿灯信息播报基本工作原理如下:
a) MEC 获取车辆行驶方向红绿灯灯色信息及当前状态剩余时间,并将该信息同步给 RSU;
b) 当车辆驶入布设在交叉口(车道)RSU 覆盖范围内时,RSU 将当前红绿灯信息广播给车辆;
c) OBU 收到信息后,将该信息通过 HMI 显示并语音播报当前红绿灯状态及剩余时间;
d) 车辆驾驶员结合收到的红绿灯信息及当前距离红绿灯位置等自行判断,安全通过或减速停车。
5.2.8.4 基本性能要求
红绿灯信息播报基本性能要求如下:
——车速≤70 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——数据更新频率≥2 Hz;
——系统延迟<100 ms。
5.2.8.5 通信方式
具备短程无线通信设备的 RSU,将有关交叉口(车道)信息广播给具有短程通信能力的车辆(I2V)。
5.2.8.6 数据交互需求

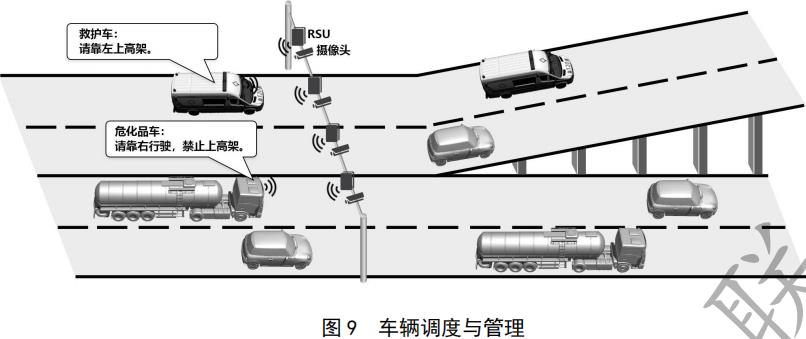
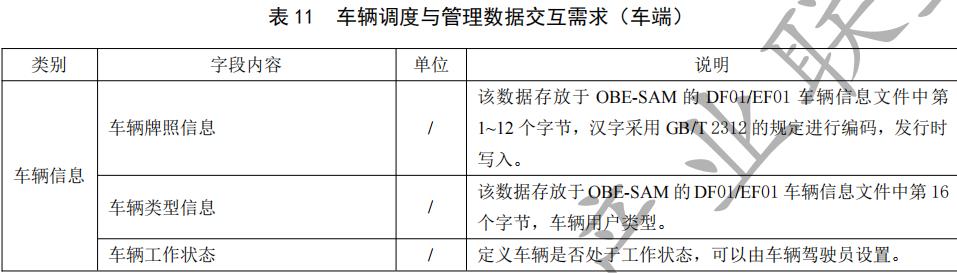
5.2.9 车辆调度与管理
5.2.9.1 应用定义和预期效果
交通调度与管理应用是指,RSU 识别被调度车辆并与其分别进行通信,实现按车型、车牌号等信息进行灵活交通调度或交通管制信息定向下发等应用。本应用适用于任何交通道路场景。
5.2.9.2 主要场景
RSU 通过读取 OBU(ETC 标签)信息识别到特定车辆(如某一号牌类型车辆、紧急车辆、“两客一危”车辆等)通过特定路段时,RSU 向特殊车辆播报由云平台下发路线指引等交通调度指令,指引车辆改变/继续当前行驶路线,以最佳的行驶方案到达目的地。
5.2.9.3 基本工作原理
车辆调度与管理基本工作原理:
a) RSU 读取 OBU 中车辆类型、当前工作状态等车辆信息;
b) 路侧感知子系统定位当前特殊车辆所处位置信息(与 RSU 车道方向距离、处于哪条车道等),并上报该信息至云平台;
c) 云平台结合当前特殊车辆所处道路信息(如拥堵情况、高架桥、限行情况等)情况,下发行驶指引路径;
d) RSU 向特殊车辆播报路径指引信息,特殊车辆收到信息后根据自身情况选择执行/不执行该引导信息。
5.2.9.4 基本性能要求
车辆调度与管理基本性能要求如下:
——车速≤130 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——系统延迟<100 ms。
5.2.9.5 通信方式
OBU 和 RSU 需具备短程无线通信能力,RSU 将云平台下发的车辆调度信息发送给车辆(I2V)。
5.2.9.6 数据交互需求

5.2.10 车内标牌
5.2.10.1 应用定义和预期效果
车内标牌是指,当装载 ETC2.0 车载单元(OBU)的车辆经过特定路段时,会收到由路侧单元(RSU)发送的交通标牌信息,给予驾驶员相应的交通标牌提示,保证车辆安全行驶。本应用适用于任何交通道路场景。
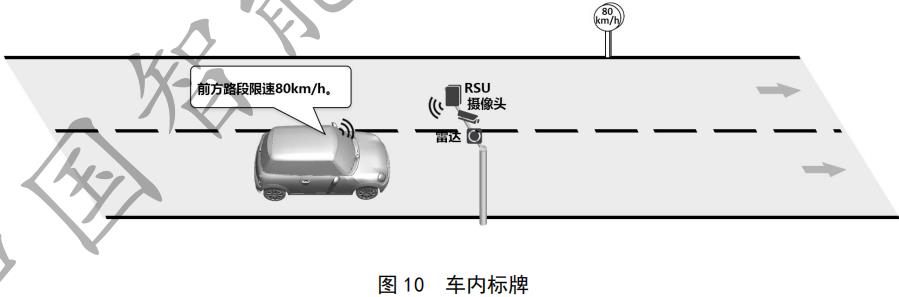
5.2.10.2 主要场景
当车辆通过 RSU 覆盖区域时,RSU 将当前路段交通标牌信息广播给通过该区域行驶的车辆(如限速标牌、前方急弯等静态信息),提醒车辆按照当前路段行驶要求安全行驶。
5.2.10.3 基本工作原理
车内标牌基本工作原理如下:
a) 云平台向靠近特定路段的 RSU 下发当前路段标牌信息,如限速、急转弯等;
b) 当车辆驶入布设 RSU 覆盖范围内时,RSU 将标牌信息广播给车辆;
c) 车辆驾驶员收到信息后结合自身驾驶情况调整当前驾驶状态。
5.2.10.4 基本性能要求
车内标牌性能要求如下:
——车速≤130 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——系统延迟<100 ms。
5.2.10.5 通信方式
OBU 和 RSU 需要具备短程无线通信能力,云平台将相关重要交通标志信息发给 RSU,或者本地存储在 RSU,由 RSU 将该信息发送给车辆(I2V 方式)。
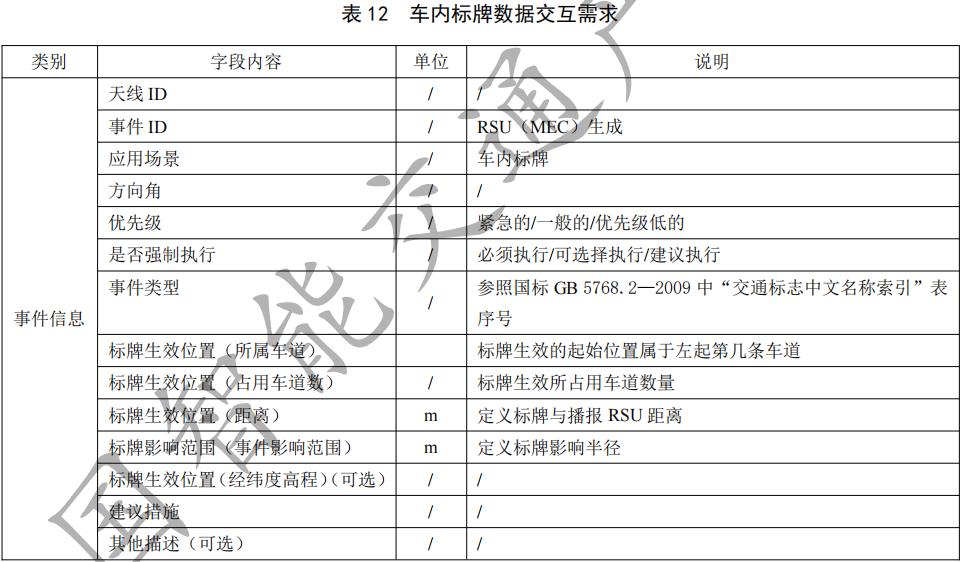
5.2.10.6 数据交互需求
5.2.11 收费路段提醒
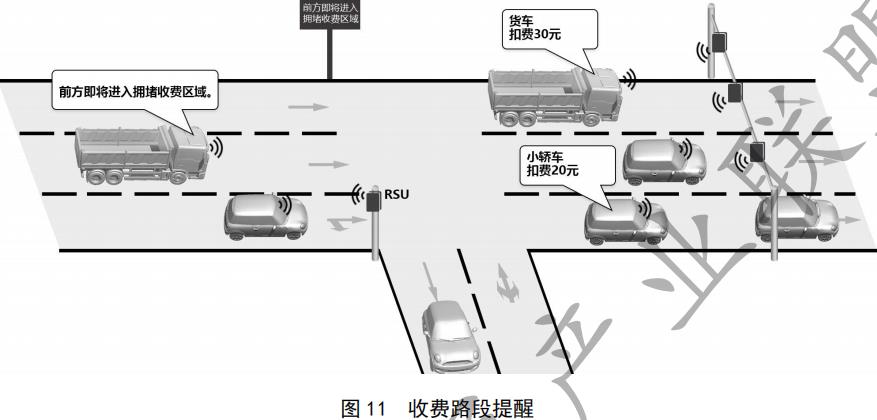
5.2.11.1 应用定义和预期效果
收费路段提醒应用指,当车辆即将驶入收费路段(如拥堵收费,或带有罚款性质的禁行路段)时,该应用给车辆发送收费信息提醒。通过对特定路段的使用者收费来引导和调节交通需求,缓解交通拥堵,同时提高道路利用率和效益。
5.2.11.2 主要场景
车辆行驶前方有收费路段,RSU 提前向即将驶入该收费路段的车辆广播收费提醒信息,如收费时段、费率等,车辆驾驶员收到信息后结合收费信息及其他出行成本因素判断是否继续当前道路行驶。该应用要求给车辆预留足够时间绕道行驶,避免车辆被动进入收费路段。
5.2.11.3 基本工作原理
收费路段提醒基本工作原理如下:
a) 云平台向汇入收费路段的 RSU 下发当前时段、路段、不同车型的收费标准;
b) 当车辆驶入 RSU 天线覆盖范围内时,RSU 天线通过读取 OBU 内容识别车辆类型,并播报该类车辆的收费标准(语音播报或 HMI 显示);
c) 该信息要求在车辆离收费路段较远处就发送给车辆,使车辆驾驶员预留足够时间换道行驶,避免造成被迫驶入收费路段;
d) RSU 可根据收费标准对行驶进入收费路段的车辆 OBU 进行实时费用扣取(ETC 自身功能)。
5.2.11.4 基本性能要求
收费路段提醒基本性能要求如下:
——车速≤70 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——系统延迟<100 ms。
5.2.11.5 通信方式
OBU 和 RSU 需具备短程无线通信能力,RSU 读取车辆类型(可选),同时将云平台下发的费率信息,及前方有收费路段信息发送给车辆(I2V)。
5.2.11.6 数据交互需求


5.2.12 智慧场站指引
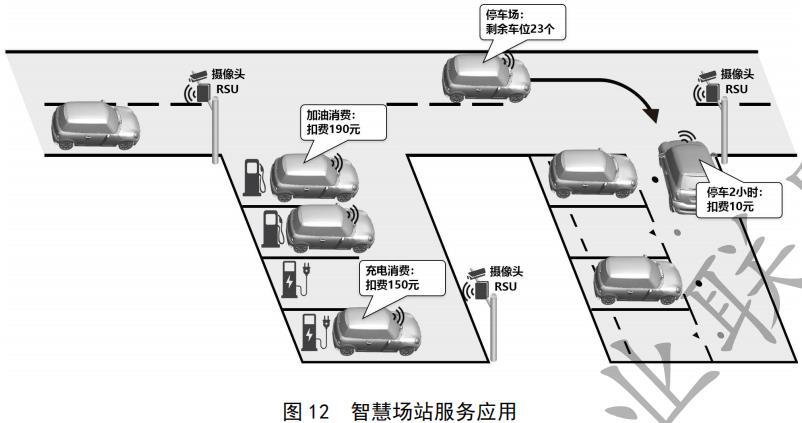
5.2.12.1 应用定义和预期效果
智慧场站指引应用是为车辆提供停车位、加油站、充电站等资源的实时信息,结合其它模块进行预约与调度,实现车辆、车牌、资源(如车位、加油位、充电桩等)的一体化匹配,智能引导车辆驶入该资源位,并在服务完成后通过 OBU 自动扣费(扣费交易流程在本文件中不再进行描述),实现服务区的智能化升级。
5.2.12.2 主要场景
资源位置描述方式说明:
对于加油站等站点较少的场站:播报加油站当前空位编号,指引车辆快速驶入服务位;
对于停车场等车位较多的场站:播报当前停车场剩余空位数量。
5.2.12.3 基本工作原理
智慧场站指引基本工作原理:
a) 智慧场站后台将场站内停车位、加油站、充电站等资源的信息实时下发给 RSU,信息包括停车场、加油站的剩余数量、位置等;
b) RSU 对外广播该场站信息,车辆驾驶员根据指引到相应位置。
5.2.12.4 基本性能要求
智慧场站指引基本性能要求如下:
——车速≤130 km/h;
——通信距离:沿道路方向纵向>20 m(能有效实现断面覆盖);
——系统延迟<100 ms。
5.2.12.5 通信方式
OBU 和 RSU 需具备短程无线通信能力,RSU 将信号灯信息发送给车辆(I2V)。
5.2.12.6 数据交互需求

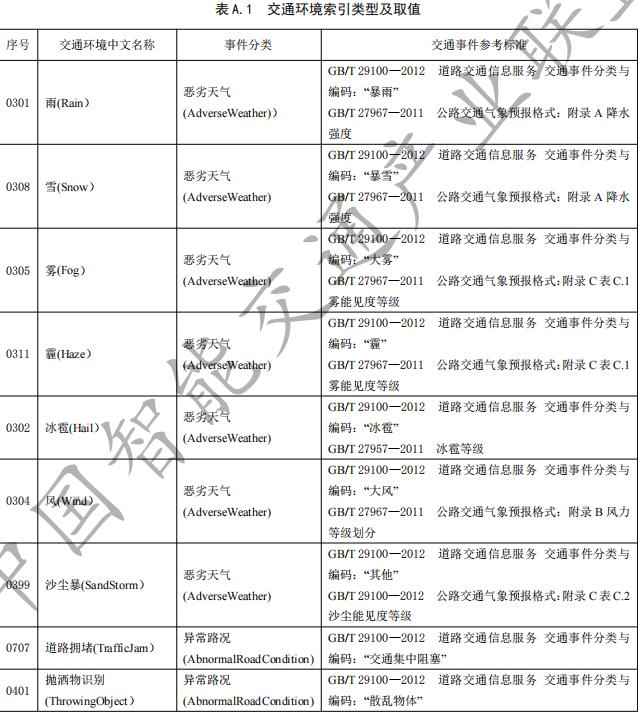
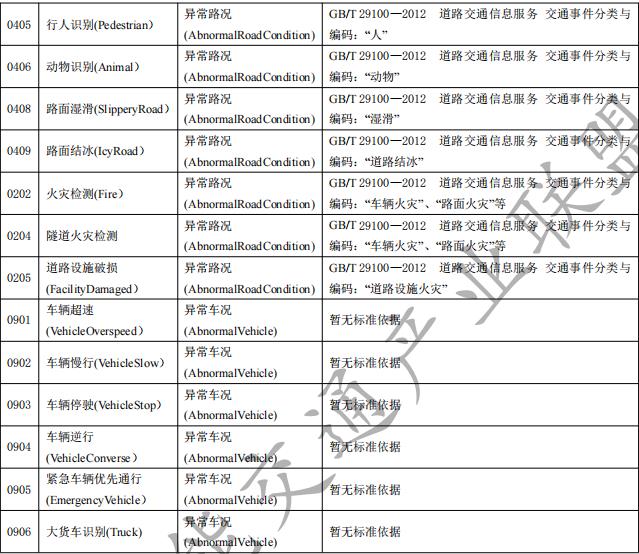
附 录 A 交通事件索引
A.1 DE_TrafficEnvironment(交通环境索引)类型及取值
表A.1给出了交通环境索引类型及取值。
A.2 DE_TrafficType(交通事故索引)类型及取值
表A.2给出了交通环境索引类型及取值。

参 考 文 献
[1] GB 5768.5—2017 道路交通标志和标线 第 5 部分:限制速度
[2] GB/T 20851.1—2019 电子收费 专用短程通信 第 1 部分:物理层
[3] GB/T 20851.2—2019 电子收费 专用短程通信 第 2 部分:数据链路层
[4] GB/T 20851.3—2019 电子收费 专用短程通信 第 3 部分:应用层
[5] GB/T 20851.4—2019 电子收费 专用短程通信 第 4 部分:设备应用
[6] GB/T 20851.5—2019 电子收费 专用短程通信 第 5 部分:物理层主要参数测试方法
[7] CJJ 37—2012 城市道路工程设计规范(2016 年版)
[8] YD/T 3709—2020 基于 LTE 的车联网无线通信技术 消息层技术要求
[9] GA/T 1090—2013 天气状况分类与代码
[10] 电子收费单片式车载单元(OBU)技术要求(交通部 35 号公告)
以上是关于基于 ETC 专用短程通信的车路协同 第 1 部分:应用集及应用数据交互需求的主要内容,如果未能解决你的问题,请参考以下文章