测试MM32 MicroPython测试电路板的基本功能
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了测试MM32 MicroPython测试电路板的基本功能相关的知识,希望对你有一定的参考价值。
简 介: 对于来自于逐飞的MM32 MicroPython模块进行补充测试。总结了现在一些缺少的功能。
关键词: MicroPython,MM32,逐飞,灵动单片机
§01 测试板简介
在 测试逐飞的MM32F3277 MicroPython开发板的基本功能 中对于来自于逐飞的MM32 MicroPython测试模块的基本功能进行了初步测试。包括GPIO, ADC, PWM以及Timer的功能。下面对于该模块的其它功能进行逐一测试。
一、改进下载软件
使用 STM32 Bootloader 利用串口REPL功能对于测试板进行程序下载。将测试板上的SD卡去掉之后,复位之后模块自动进REPL状态。改进后的软件通过检测 “>>> ”字符串确定是否开始发送 CTRL+E。利用这种条件提高了STM32 Bootloader下载的成功率。
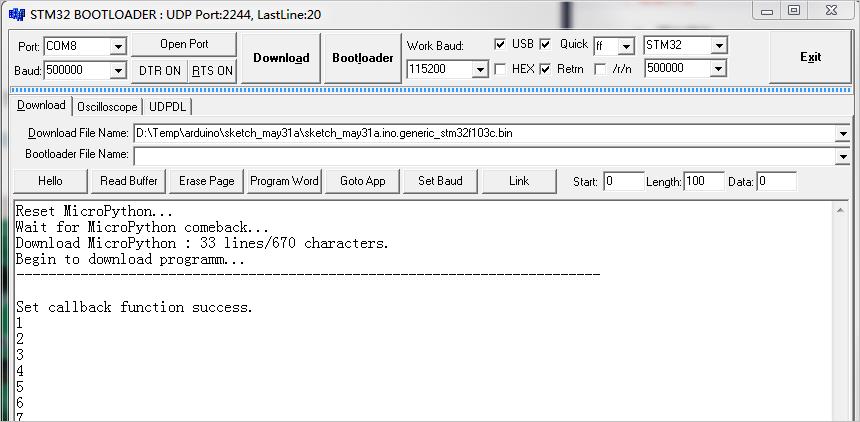
▲ 图1.1.1 下载MicroPython的过程
二、SD卡中的示例程序
在模块内部的SD中包括以下几个示例程序:
- ADC.py
- CCD.py
- ENCODER.py
- GPIO.py
- LCD180.py
- main.py
- MicroPython驱动层接口定义.xlsx
- PWM.py
- SERVO.py
- TIMER.py
- UART.py
三、将REPL的RX连接到B11
1、开发板改造
为了能够在后面测试中实现MicroPython程序与REPL之间的交互,将调试端口RX连接到B11(UART,RX)。这主要是在移植后的MicroPython中没有实现Input函数,所以通过UART3接收来自于REPL的字符,可以方便面后期的测试。
2、STM32命令
使用如下tsp 命令可以从UART3接收到字符:
stm32cmd('SENDC%s‘%string)
有MicroPython通过如下子程序接收到string.
while True:
if uart.any():
uart_str = uart.read()
print(uart_str)
servo.angle(int(uart_str))
§02 测试模块
一、UART测试
1、UART 模块
UART1使用了MCU 的UART3。
-
UART参数:
-
端口:UART3
RX:B11
TX:B10

▲ 图2.1.1 UART模块的基本信息
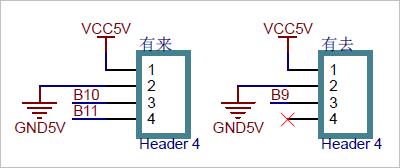
▲ 图2.1.2 B10,B11在背板上的位置
2、测试代码
循环输出‘U’,应该对应0b01010101 字符。
from seekfree import UART,GPIO
uart = UART(115200)
def delay(loop=50000):
for _ in range(loop):
pass
print('Test UART.')
while True:
uart.write('U')
delay(100000)
3、测量结果
在B10(TX)测量到输出字符‘U’对应的电压波形:
▲ 图2.1.3 B10 输出的信号波形
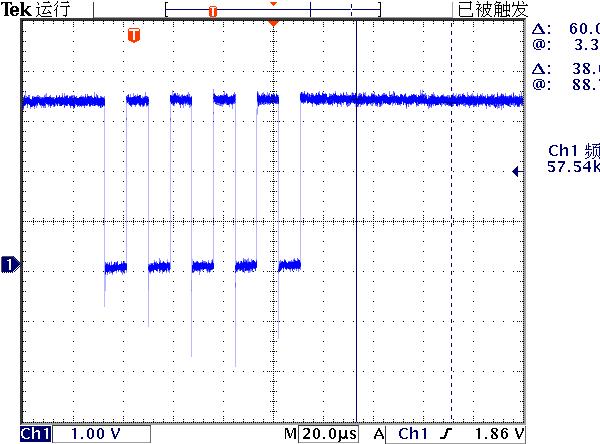
但是同时,在REPL接收到‘1’字符的输出。下面是REPL UART输出的波形。
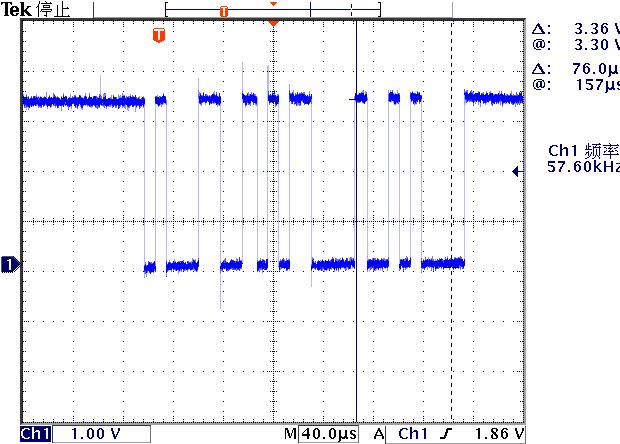
▲ 图2.1.4 REPL输出波形
将发送的字符信息修改成“HELLO”,则在REPL输出会得到‘5’。这说明每当uart输出时,会同时在REPL端口输出UART送出的字符的个数。
提示:这应该是原来移植过程中的调试信息,需要被去掉。
while True:
uart.write('HELLO')
delay(100000)
4、测试输入输出
将B10,B11短接起来,这样便可以接收到自行发送的字符。
(1)测试代码
from seekfree import UART,GPIO
uart = UART(115200)
def delay(loop=50000):
for _ in range(loop):
pass
print('Test UART.')
while True:
if uart.any():
uart_str = uart.read()
print(uart_str)
uart.write('HELLO')
delay(100000)
(2)REPL输出

▲ 图2.1.5 REPL窗口输出结果
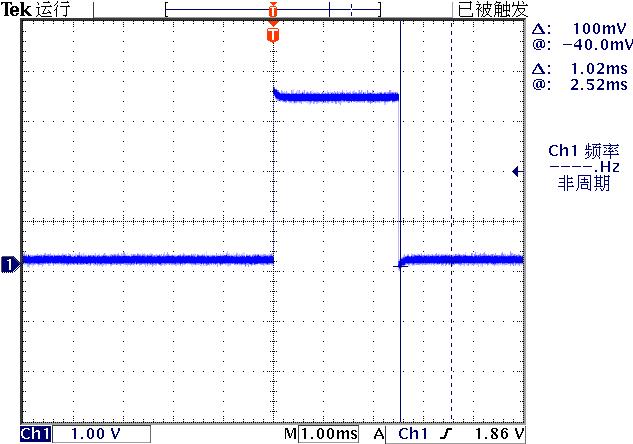
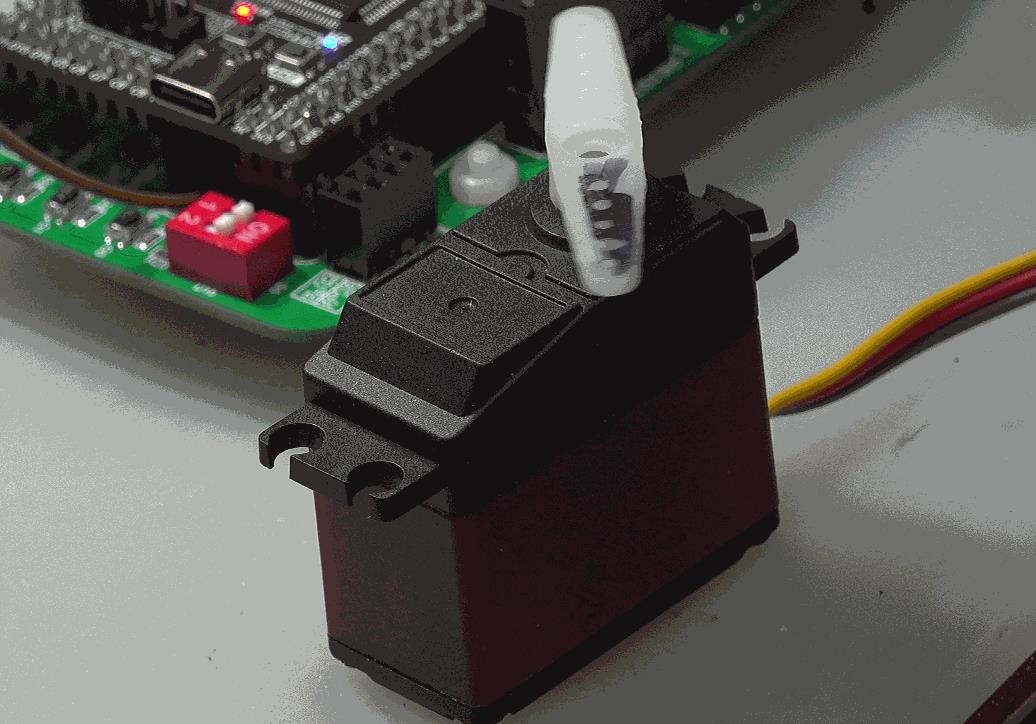
二、SERVO测量
1、硬件端口
-
舵机的输出接口:
-
MCU端口:A15
▲ 图2.2.1 SERVO 基本特性
2、输出信号
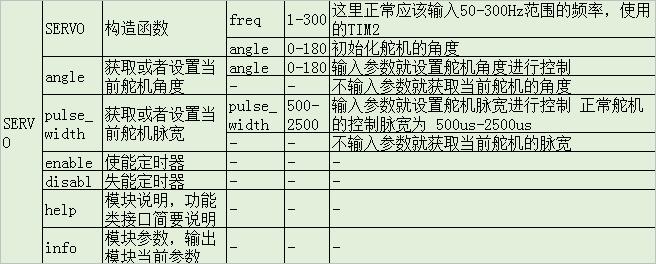
(1)Angle=0输出脉冲
angle=0时,输出脉冲宽度为0.5ms。
▲ 图2.2.2 angle = 0 对应的servo 的脉冲
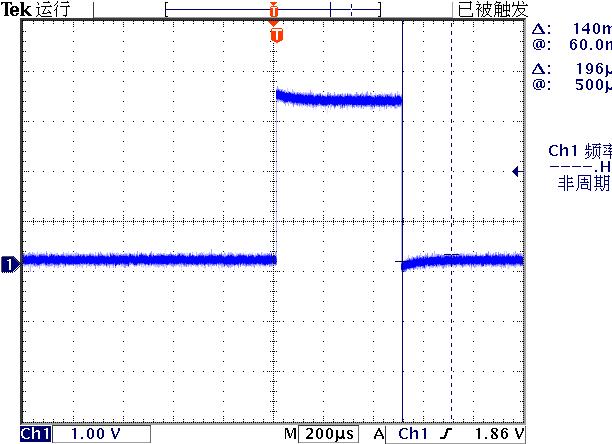
(2)Angle=180输出脉冲
angle = 180,输出脉冲的宽度为2.5ms。
▲ 图2.2.3 angle = 180 对应的servo 的脉冲
3、测试不同的angle
通过设置angle 从0 ~ 180,测量 SERVO脉冲平均电压。如下图所示。
可以看到除了少数的测量抖动之外,输出的电压平均值随着angle线性上升。
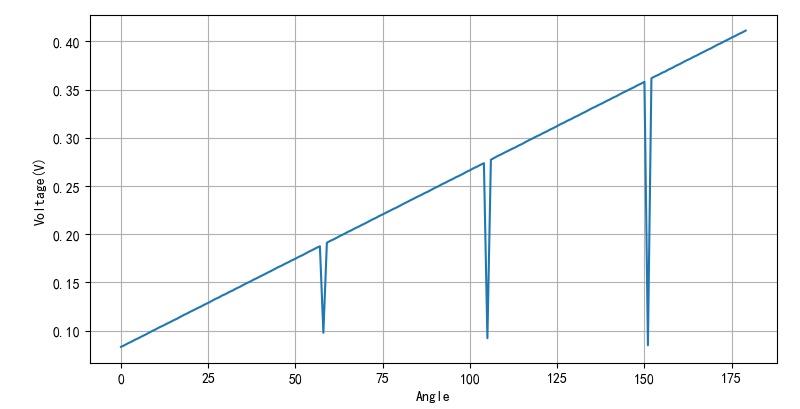
▲ 图2.2.4 不同的ANGLE设置下测量SERVO脉冲平均电压
解释:后面通过试验证明,上述曲线中的往下的三次抖动,来源于接受字符串没有能够完整接收到设置参数的3个字符。如果将判断 改成 uart.any() >= 3,便可以消除这方面的抖动了。
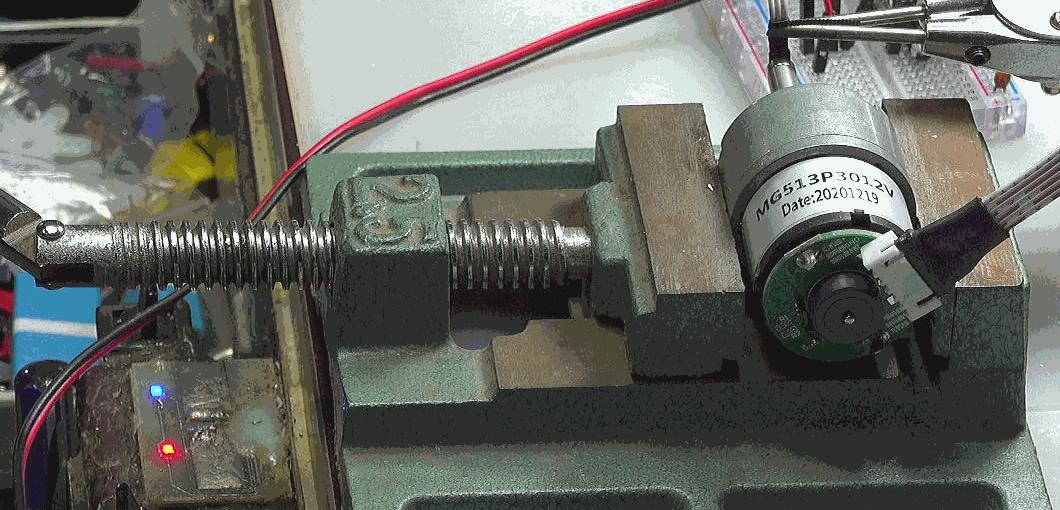
4、带动舵机
(1)测试代码
from seekfree import SERVO,GPIO,UART
servo = SERVO(50)
uart = UART(115200)
dir = 1
n = 0
count = 0x2ff
led1 = GPIO(0x1d, 1, 0)
led2 = GPIO(0x72, 1, 0)
servo.angle(180)
print("Test Servo..")
flag = 1
while True:
if uart.any():
uart_str = uart.read()
print(uart_str)
servo.angle(int(uart_str))
#--------------------------------------------------------
while count != 0:
count -= 1
count = 0x2ff
if flag == 0:
led1.high()
led2.low()
flag = 1
else:
led1.low()
led2.high()
flag = 0
#--------------------------------------------------------
if dir == 1:
n += 1
if n >= 180:
dir = 0
else:
n -= 1
if n <= 0:
dir = 1
servo.angle(n)
(2)舵机运动
▲ 图2.2.5 控制舵机运动
三、LCD180测试
1、HELP信息
module : LCD180
---------------------------------------------------------------------------------
func | explain
---------------------------------------------------------------------------------
LCD180() | Parameter up to one, at least zero.
LCD180(dir) | dir[[0-PORTAIT_U,1-PORTAIT_D,2-CROSSWISE_R,3-CROSSWISE_L]], default dir = 0.
LCD180(dir, pen_color) | pen_color[RGB565], default pen_color = BLACK<0x0000>.
LCD180(dir, pen_color, bgcolor)| bgcolor[RGB565], default bgcolor = WHITE<0xFFFF>.
---------------------------------------------------------------------------------
LCD180.help() | No parameter. Module prompt.
---------------------------------------------------------------------------------
LCD180.info() | No parameter. Module parameter info.
---------------------------------------------------------------------------------
LCD180.full() | Parameter up to one, at least zero.
LCD180.full(color) | color[RGB565]
| Enter with no Parameter will full whith bgcolor.
---------------------------------------------------------------------------------
LCD180.show_image \\ | Parameter up to six, at least three.
(img, length, wide, x, y, zoom)| img - image, must be entered.
| length - image length, must be entered.
| wide - image wide, must be entered.
| x - display offset for x axial, default 0, should be less than X_MAX.
| y - display offset for y axial, default 0, should be less than Y_MAX.
| zoom - the ratio of display reduction, default 0, scale down the length and width.
---------------------------------------------------------------------------------
LCD180.show_wave \\ | Parameter up to six, at least three.
(wave, length, max, | wave - wave, must be entered.
x, y, zoom_x, zoom_y) | length - wave length, must be entered.
| max - wave max value, must be entered.
| x - display offset for x axial, default 0, should be less than X_MAX.
| y - display offset for y axial, default 0, should be less than Y_MAX.
| zoom_x - the ratio of display reduction, default 0, scale down the length.
| zoom_y - the ratio of display reduction, default 0, scale down the max.
---------------------------------------------------------------------------------
LCD180.show_str \\ | Parameter up to six, at least three.
(str, x, y, color, sparency) | str - string, must be entered.
| x - display offset for x axial, default 0, should be less than X_MAX.
| y - display offset for y axial, default 0, should be less than Y_MAX.
| color - string color, RGB565 data, default bgcolor.
| sparency- background transparent, default is 0-disable, set 1-enable.
---------------------------------------------------------------------------------
2、填充颜色
from seekfree import GPIO,UART,LCD180
dis = LCD180(0)
def delay(loop=50000):
for _ in range(loop):
pass
while True:
delay()
dis.full(dis.BLUE)
delay()
dis.full(dis.RED)
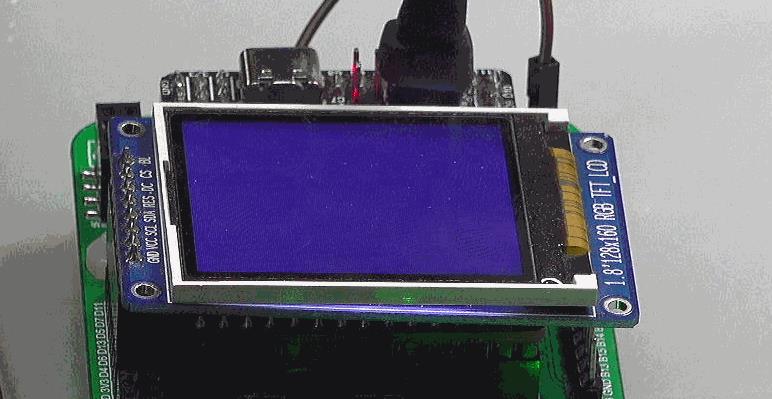
▲ 图2.3.1 重复填充颜色
3、显示字符串
from seekfree import GPIO,UART,LCD180
dis = LCD180(0)
dis.full(dis.BLUE)
def delay(loop=50000):
for _ in range(loop):
pass
dis.show_str('hello', 0, 0)
count = 0
while True:
dis.show_str('COUNT:%04d'%count, 10, 100)
count += 1
delay(10000)
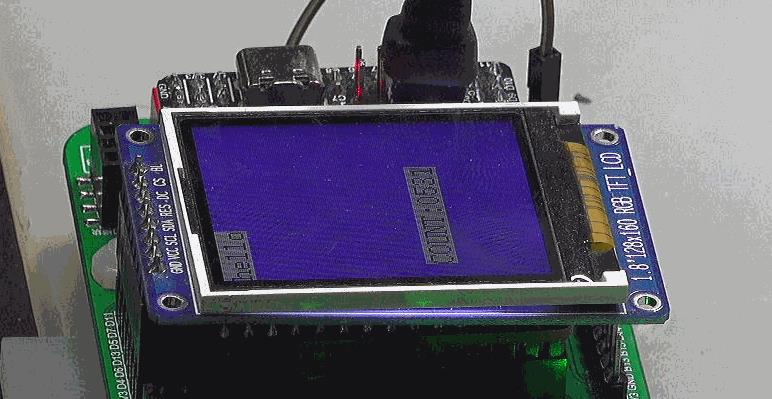
▲ 图2.3.2 显示字符串
4、显示电压波形
从ADC读取电压,并显示在LCD中。
from seekfree import GPIO,UART,LCD180,ADC
adc = ADC(0)
adc.channel_init(adc.A4)
dis = LCD180(1)
dis.full(dis.WHITE)
def delay(loop=50000):
for _ in range(loop)