R-CNNFast R-CNNFaster R-CNN算法对比
Posted 大彤小忆
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了R-CNNFast R-CNNFaster R-CNN算法对比相关的知识,希望对你有一定的参考价值。
R-CNN、Fast R-CNN、Faster R-CNN算法都是基于Region Proposal(候选区域)的深度学习目标检测算法,是2-stage两阶段检测模型。
Region Proposal就是预先找出图中目标可能出现的位置,通过利用图像中的纹理、边缘、颜色等信息,保证在选取较少窗口(几千个甚至几百个)的情况下保持较高的召回率(IoU)。
边框回归(Bouding Box Regression):对RegionProposal进行纠正的线性回归算法,目的是为了让Region Proposal提取到的窗口与目标窗口(Ground Truth)更加吻合。
从R-CNN到Fast R-CNN,再到Faster R-CNN,目标检测的四个基本步骤(候选区域生成、特征提取、目标分类、边框回归)终于被统一到一个深度网络框架之内。

- R-CNN(Region-based Convolutional Neural Networks)
步骤:1. SS提取RP;
2. CNN提取特征;
3. SVM分类;
4. BB盒回归。
优点:1. 从DPM HSC的34.3%直接提升到了66%(mAP);
2. 引入RP+CNN。
缺点:1. 训练步骤繁琐(微调网络+训练SVM+训练bbox);
2. 训练、测试均速度慢;
3. 训练占空间。

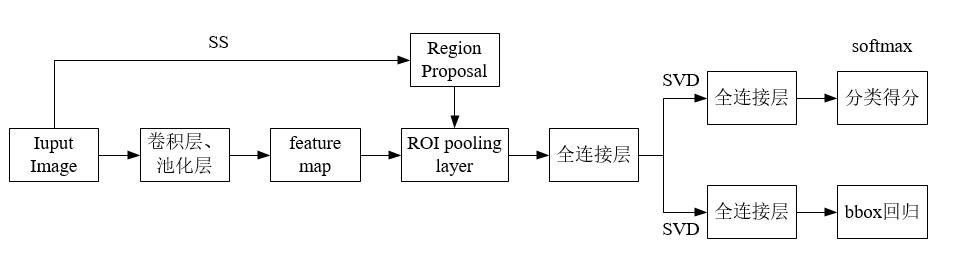
- Fast R-CNN (Fast Region-based Convolutional Neural Networks)
步骤:1. SS提取RP;
2. CNN提取特征;
3. softmax分类;
4. 多任务损失函数边框回归。
优点:1. 由66.9%提升到70%;
2. 每张图像耗时约为3s。
缺点:1. 依旧用SS提取RP(耗时2-3s,特征提取耗时0.32s);
2. 无法满足实时应用,没有真正实现端到端训练测试;
3. 利用了GPU,但是候选区域提取方法是在CPU上实现的。
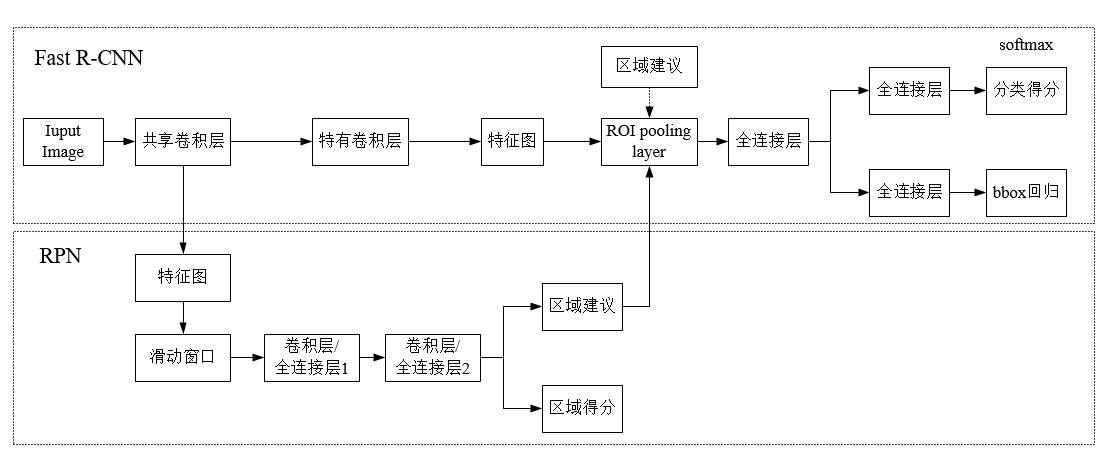
- Faster R-CNN (Fast Region-based Convolutional Neural Networks)
步骤:1. RPN提取RP;
2. CNN提取特征;
3. softmax分类;
4. 多任务损失函数边框回归。
优点:1. 提高了检测精度和速度;
2. 真正实现端到端的目标检测框架;
3. 生成建议框仅需约10ms。
缺点:1. 还是无法达到实时检测目标;
2. 获取region proposal,再对每个proposal分类计算量还是比较大。
以上是关于R-CNNFast R-CNNFaster R-CNN算法对比的主要内容,如果未能解决你的问题,请参考以下文章
(转)基于深度学习的目标检测技术演进:R-CNNFast R-CNNFaster R-CNN
目标检测梳理:基于深度学习的目标检测技术演进:R-CNNFast R-CNNFaster R-CNN
R-CNNSPPnetFast R-CNNFaster R-CNN的对比