如何使用esp32从零制作一个ROS2的teleop遥控器(cmd_vel)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了如何使用esp32从零制作一个ROS2的teleop遥控器(cmd_vel)相关的知识,希望对你有一定的参考价值。
使用课程所用镜像,硬件连线如下图所示:
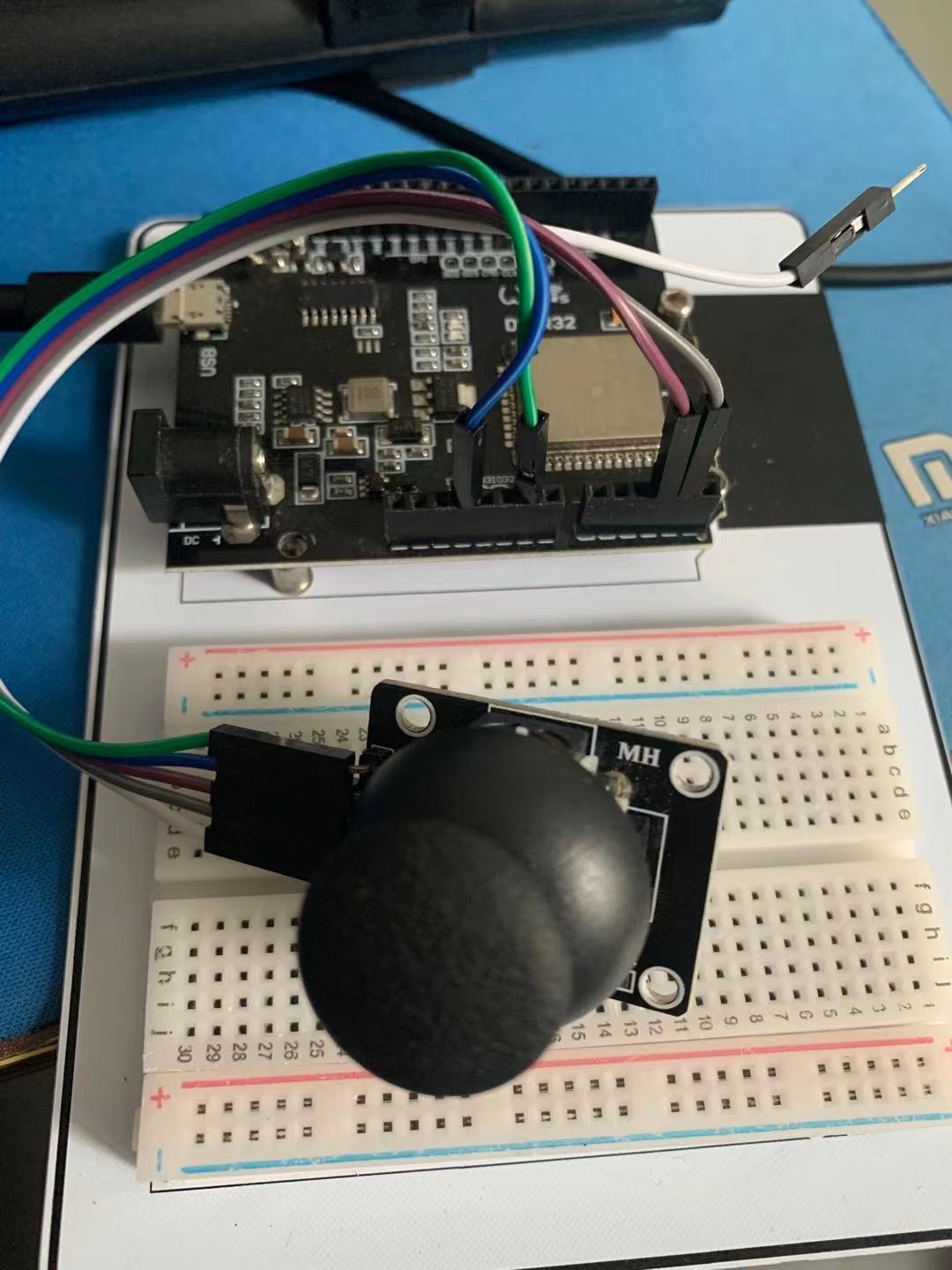
使用io口34和36,对应的arduino端口如下列表:
static const uint8_t A0 = 36;
static const uint8_t A3 = 39;
static const uint8_t A4 = 32;
static const uint8_t A5 = 33;
static const uint8_t A6 = 34;
static const uint8_t A7 = 35;
static const uint8_t A10 = 4;
static const uint8_t A11 = 0;
static const uint8_t A12 = 2;
static const uint8_t A13 = 15;
static const uint8_t A14 = 13;
static const uint8_t A15 = 12;
static const uint8_t A16 = 14;
static const uint8_t A17 = 27;
static const uint8_t A18 = 25;
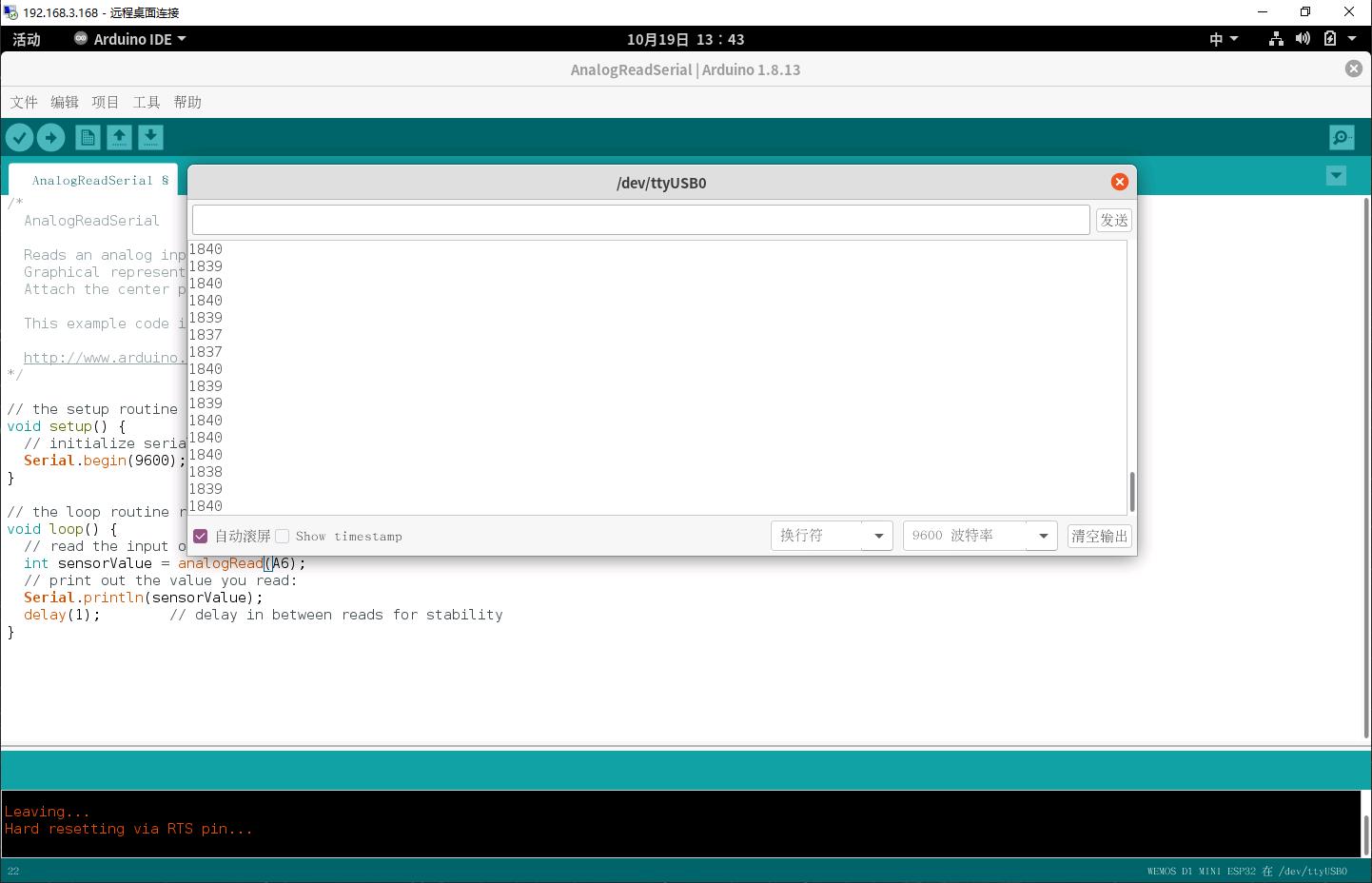
static const uint8_t A19 = 26;分别是A0和A6,测试一下,是否ok。
void setup() {
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
}
// the loop routine runs over and over again forever:
void loop() {
// read the input on analog pin 0:
int sensorValue = analogRead(A0);
// print out the value you read:
Serial.println(sensorValue);
delay(1); // delay in between reads for stability
}分别测一下A0和A6是否正常。

参考如下两篇:
esp32(ROS2foxy)从字符串发布到速度发布turtlesim_zhangrelay的专栏-CSDN博客
esp32➡遥控篇➡turtlesim➡mobot➡turtlebot3_zhangrelay的专栏-CSDN博客
然后尝试写出如下代码:
#include <ros2arduino.h>
#include <WiFi.h>
#include <WiFiUdp.h>
#define SSID "***"
#define SSID_PW "***"
#define AGENT_IP "***"
#define AGENT_PORT 2021 //AGENT port number
#define PUBLISH_FREQUENCY 2 //hz
int linx_mid = 0;
int angz_mid = 0;
int sensorlinx = 0;
int sensorangz = 0;
void publishVel(geometry_msgs::Twist* vel, void* arg)
{
(void)(arg);
static int cnt = 0;
vel->linear.x = (sensorlinx-linx_mid)/1024.0; //线速度
vel->angular.z = (sensorangz-angz_mid)/1024.0; //角速度
cnt++;
}
class VelPub : public ros2::Node
{
public:
VelPub()
: Node("esp32_cmdvel")
{
ros2::Publisher<geometry_msgs::Twist>* publisher_ = this->createPublisher<geometry_msgs::Twist>("turtle1/cmd_vel");
this->createWallFreq(PUBLISH_FREQUENCY, (ros2::CallbackFunc)publishVel, nullptr, publisher_);
}
};
WiFiUDP udp;
void setup()
{
WiFi.begin(SSID, SSID_PW);
while(WiFi.status() != WL_CONNECTED);
ros2::init(&udp, AGENT_IP, AGENT_PORT);
linx_mid = analogRead(A6);
angz_mid = analogRead(A0);
}
void loop()
{
sensorlinx = analogRead(A6);
sensorangz = analogRead(A0);
static VelPub VelNode;
ros2::spin(&VelNode);
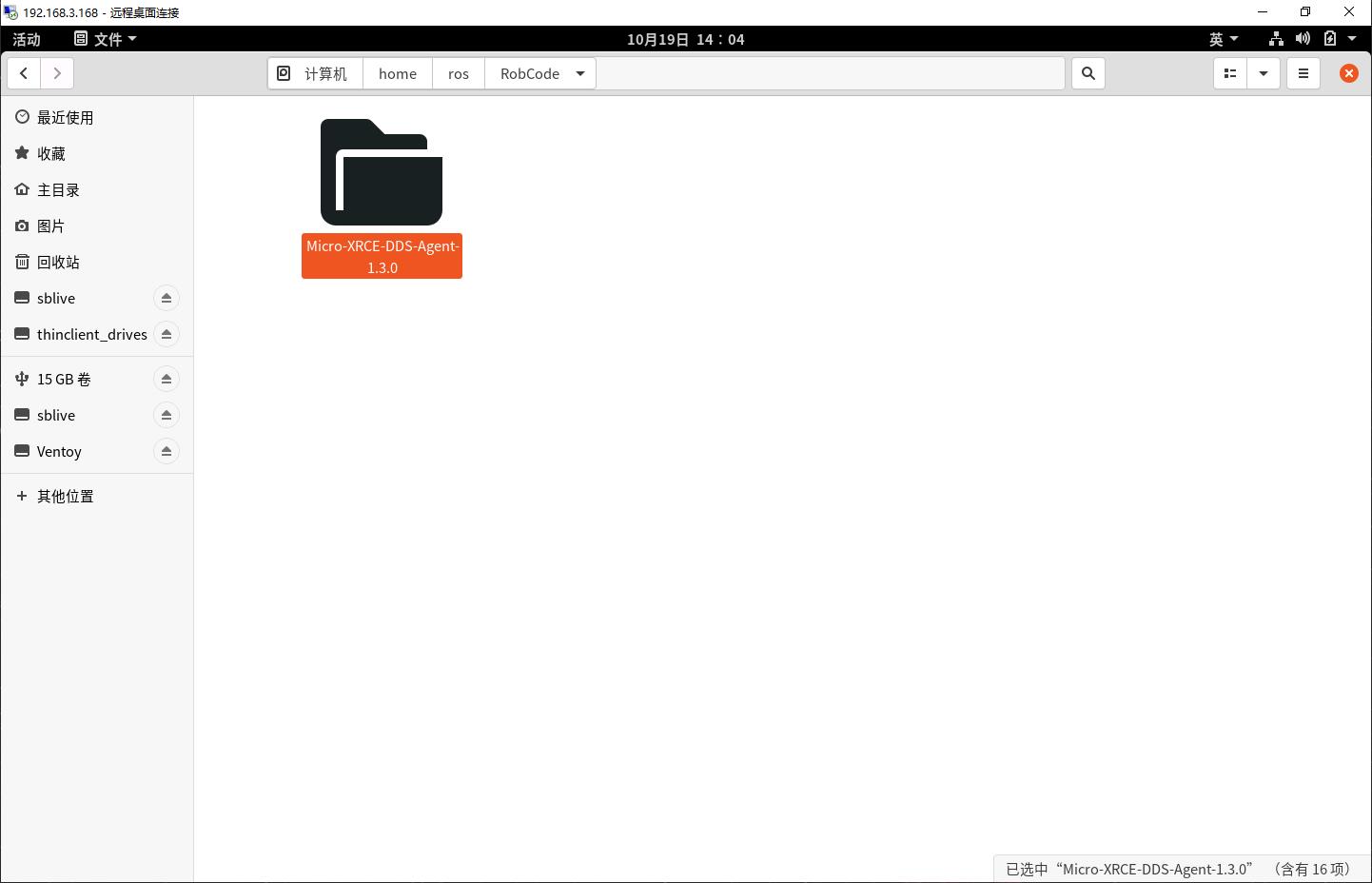
}需要配置Micro-XRCE-DDS-Agent-1.3.0,在home文件下中新建ros/RobCode文件夹,并将编译好文件放入其中。
如果直接运行tool下工具会报错。需要安装此库。复制后即完成安装,如果不行,使用sudo make install。
正常后如下所示:
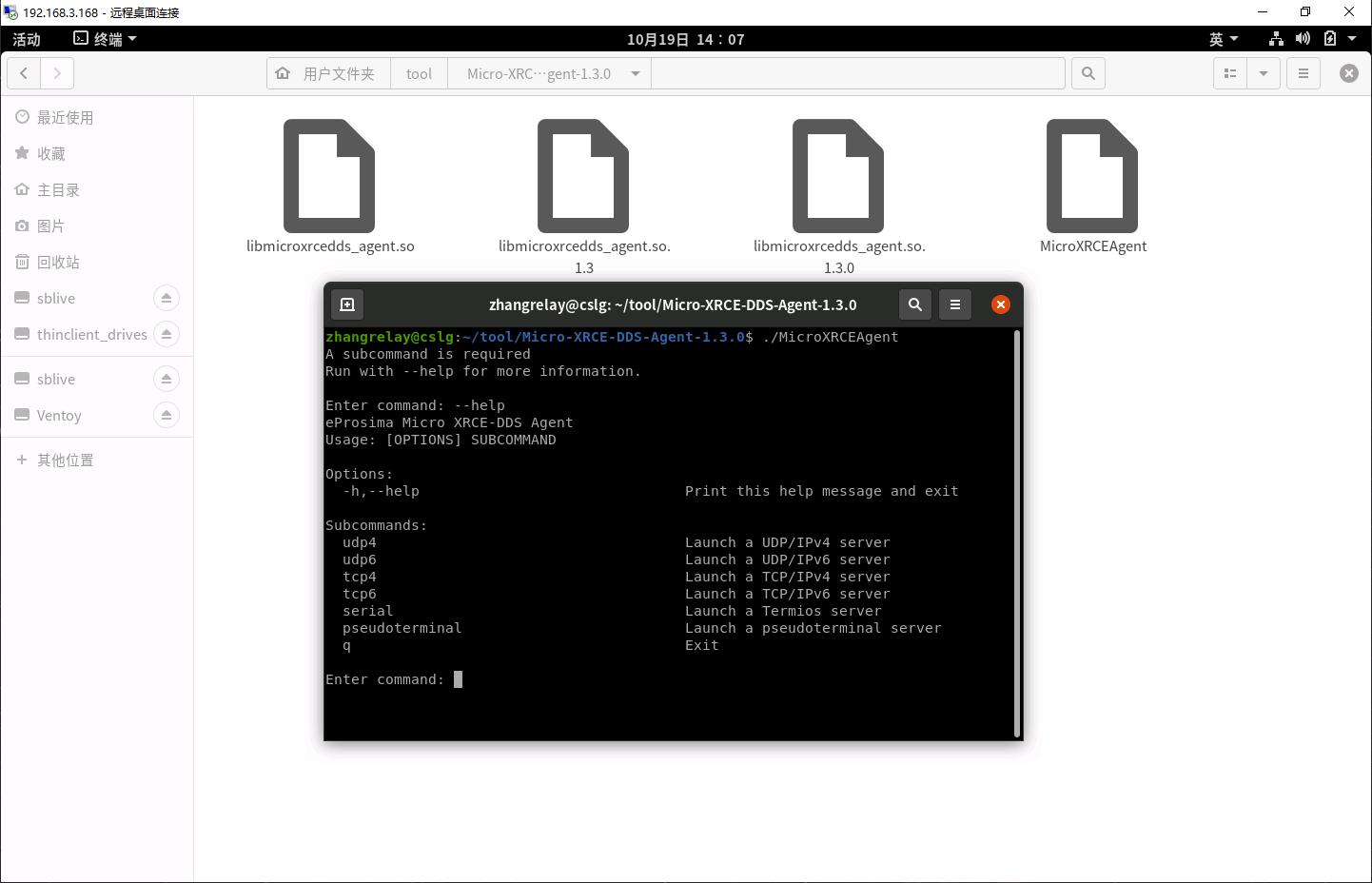
先输入q退出,然后再输入如下命令行:
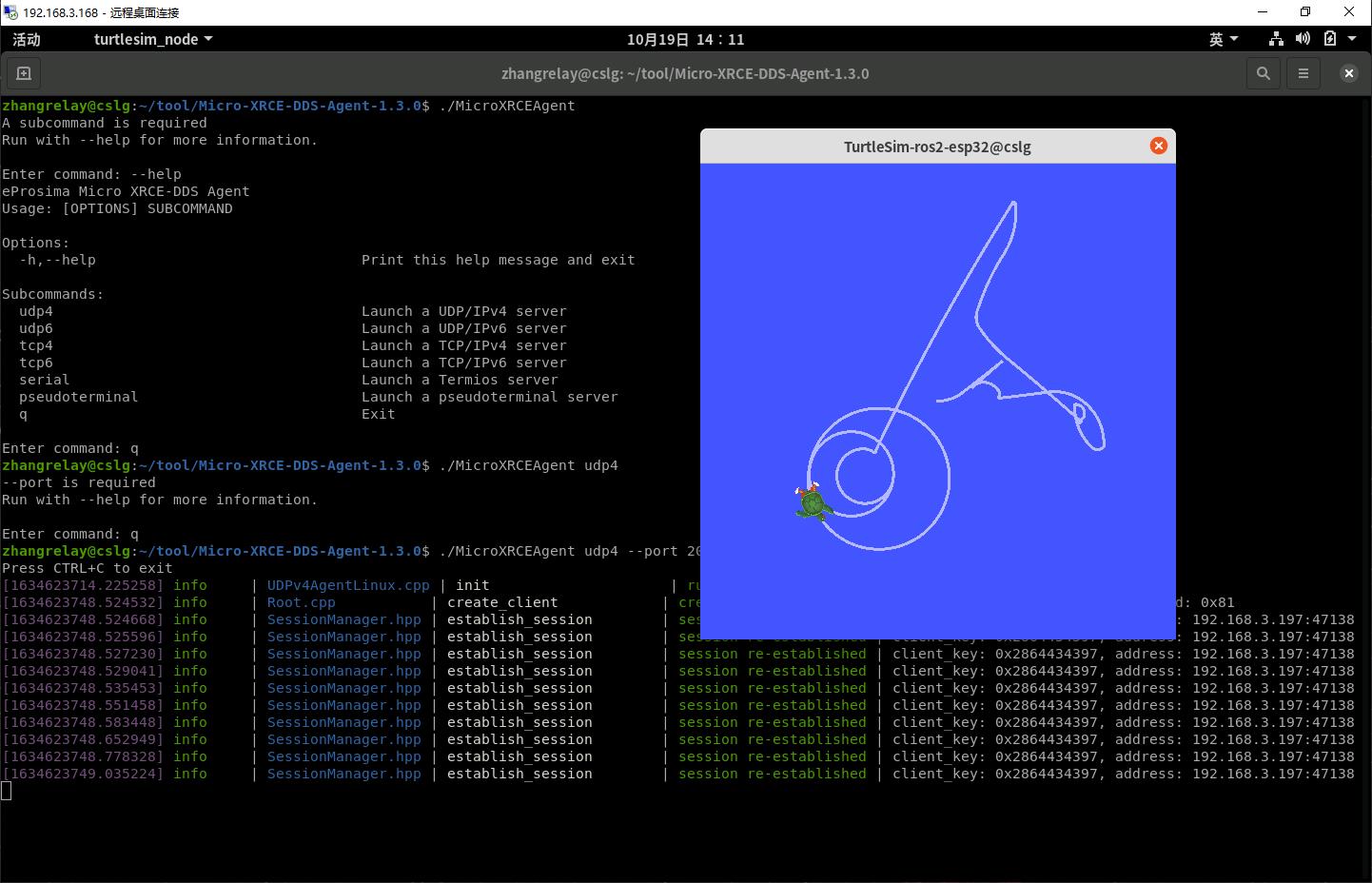
./MicroXRCEAgent udp4 --port 2021
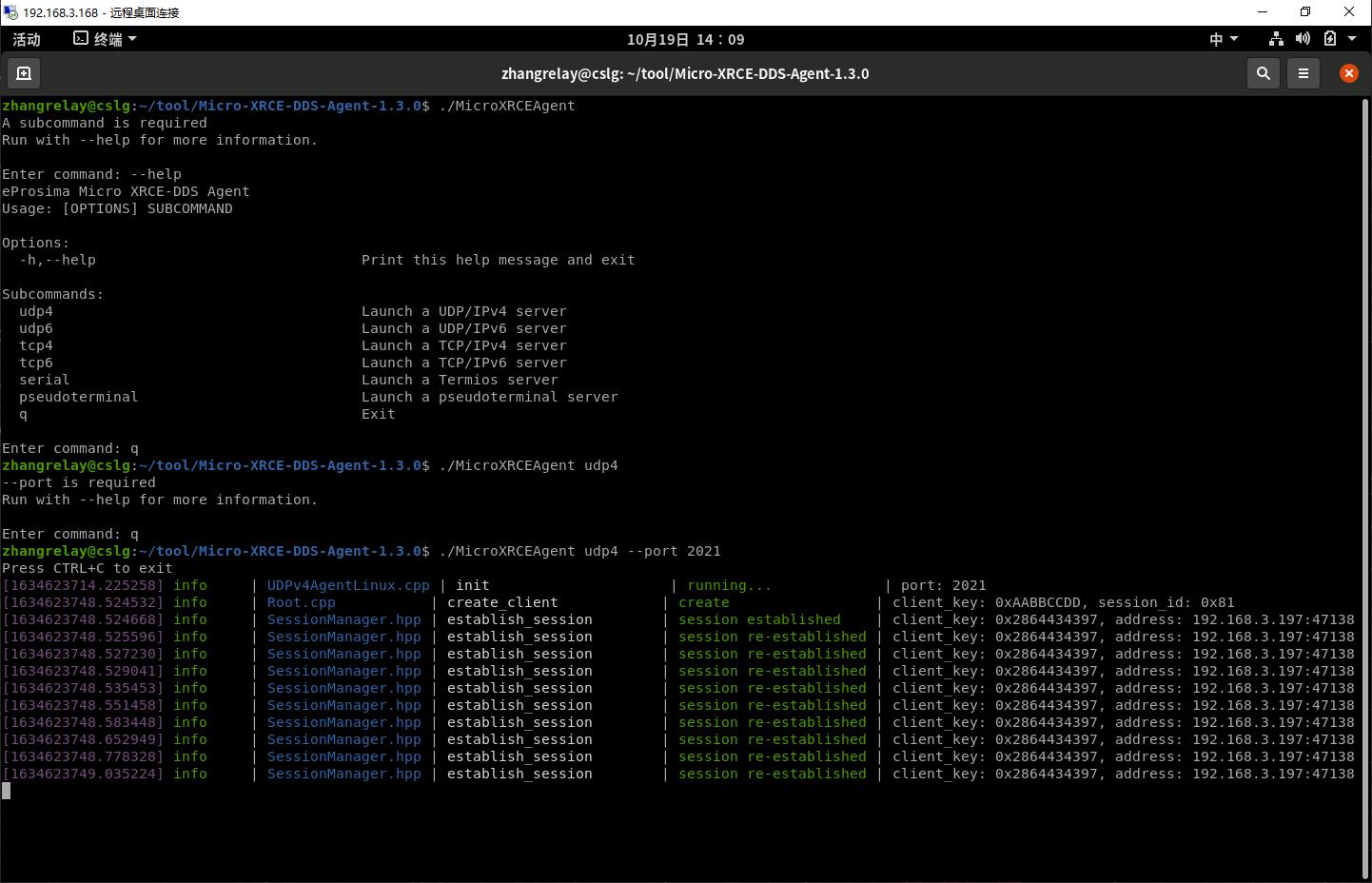
完成配置。打开turtlesim。即可用esp32进行遥控。
以上是关于如何使用esp32从零制作一个ROS2的teleop遥控器(cmd_vel)的主要内容,如果未能解决你的问题,请参考以下文章