简单滤波算法常见的滤波算法讲解及例程
Posted Z小旋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了简单滤波算法常见的滤波算法讲解及例程相关的知识,希望对你有一定的参考价值。
限幅滤波法
算法:
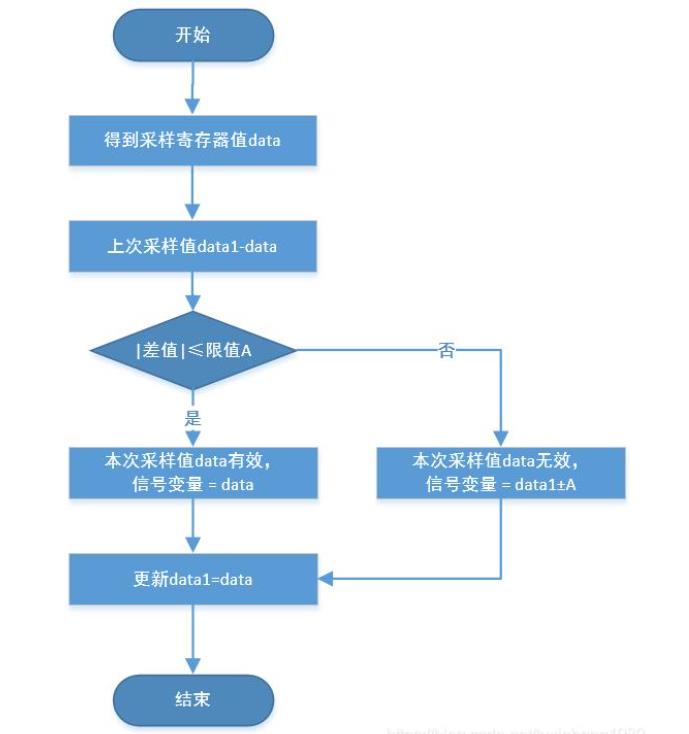
确定两次采样允许的最大偏差值(设为 A)
每次检测到新的采样值时判断:
如果本次值与上次值之差<=A,则本次采样值有效
如果本次值与上次值之差>A,则本次采样值无效。
如果本次采样值无效,对本次采样可以做不同的处理。
比方说:
- 放弃本次采样值,使用上次采样值作为本次采样值
- 本次采样值=上次采样值± 限幅A
- 放弃本次采样值,重新采样
优点:
- 能够消除因偶然波动引起的误差
缺点
- 无法抑制周期性的干扰
- 平滑度差
代码:
/* variation_Range 值可根据实际情况调整*/
#define variation_Range 10
char Bounds_Filter(char new_value,char old_value)
{
if( abs(new_value - old_value> variation_Range ))
return old_value;
return new_value;
}
或:
/* 10为限幅值,可根据实际情况调整*/
new_value= abs(new_value - old_value) > 10 ? old_value:new_value ;//限幅
一行代码搞定
中位值滤波法
算法:
连续采样奇数个数据,然后对数据从小到大排序,取中间的值做为本次采样值
优点:
中位值滤波法可以滤除偶然因素引起的脉冲干扰,可以滤除数据的毛刺,使采样数据更加平滑。
适用于变化缓慢的较为线性的采样系统,如温度等被测参数
缺点:
采样值快速变化的系统不宜使用
代码:
//采样samples_Num次,然后用冒泡排序进行排序,最后取中值
#define samples_Num 5 //采样次数
int Median_Filter()
{
unsigned int value[M] = {0};
unsigned int count, i, j, temp;
for( count = 0; count < samples_Num ; count++ )
{
value[count] = Read_Adc();
}
for( j = 0; j < samples_Num - 1; j++ )
{
for( i = 0; i < samples_Num - j - 1; i++ )
{
if( value[i] > value[i + 1] )
{
temp = value[i];
value[i] = value[i + 1];
value[i + 1] = temp;
}
}
}
return value[( M - 1 ) / 2];
}
算术平均值滤波
算法:
在某时刻对信号进行连续多次采样,对采样值进行算术平均(平均值),作为该时刻的信号采样值
就是取平均值,连续采样的次数视具体情况而定
优点:
对抑制周期性干扰和随机干扰有良好效果
缺点:
采样比较耗时,并且平均值可能受到某个数据干扰而产生较大浮动。
代码:
#define N 10
int value = 0;
int Arithmetic_Filter()
{
for(int i = 0; i < N; i++)
{
value = value + Read_Adc();
}
return (value/N);
}
滑动算术平均值滤波
算法:
滑动平均值滤波是指先在RAM中建立一个数据缓冲区,依顺序存放N个采样数据,每采进一个新数据,就将最早采集的那个数据丢掉,而后求包括新数据在内的N个数据的算术平均值或加权平均值。这样,每进行一次采样,就可计算出一个新的平均值,从而加快了数据处理的速度.
优点:
对周期性干扰有良好的抑制作用,平滑度高
缺点:
灵敏度低
对干扰抑制作用低
#define size 6000//数组大小
#define N 12//滑动平均滤波计算平均值时所取的点数
/*上面两句在使用下面这个函数的时候加到程序的开头*/
void Smooth(float data[])
{
Sum1=0;
for(int j=0;j<size;j++)
{
if(j<N/2)
{
for(int k=0;k<N;k++)
{
Sum1+=data[j+k];
}
data[j]=Sum1/N;
}
else
if(j<size -N/2)
{
for(int k=0;k<N/2;k++)
{
Sum1+=(data[j+k]+data[j-k]);
}
data[j]=Sum1/N;
}
else
{
for(int k=0;k<size-j;k++)
{
Sum1+=data[j+k];
}
for(int k=0;k<(N-size+j);k++)
{
Sum1+=data[j-k];
}
data[j]=Sum1/N;
}
Sum1=0;
}
}
中位值平均滤波法
算法:
连续采样 N 个数据,去掉最大值和最小值 ,然后计算 N‐2 个数据的平均值,作为采样值
优点:
对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差
缺点:
用时比较久
代码
#define N 12
unsigned int Med_Avg_Filter()
{
unsigned int count, i, j, temp;
unsigned int value_buf[N];
int ad_sum= 0;
//采样N次
for( count = 0; count < N; count++ )
{
value_buf[count] = Read_ADC();
}
/*=========================冒泡排序升序==========================*///舍弃最大值和最小值
for( j = 0; j < N - 1; j++ )
{
for( i = 0; i < N - j - 1; i++ )
{
if( value_buf[i] > value_buf[i + 1] )
{
temp = value_buf[i];
value_buf[i] = value_buf[i + 1];
value_buf[i + 1] = temp;
}
}
}
//求中间项的和
for( count = 1; count < N - 1; count++ )
{
ad_sum+= value_buf[count];
}
return (ad_sum/( N -2 ));
}
}
一阶低通滤波
方法:
滤波结果=a*本次采样值+(1-a)*上次滤波结果
a取值为0~1之间
就是将新的采样值与上次的滤波结果计算一个加权平均值。
a的取值决定了算法的灵敏度,a越大,新采集的值占的权重越大,算法越灵敏,但平顺性差;相反,a越小,新采集的值占的权重越小,灵敏度差,但平顺性好
优点:
对周期性干扰具有良好的抑制作用
适用于波动频率较高的场合
缺点:
相位滞后,灵敏度低
代码:
float final=0;
float a=0.25;
float first_Order_Filter(float data)
{
final = a*data + (1-a)*final;
return(final);
}


以上是关于简单滤波算法常见的滤波算法讲解及例程的主要内容,如果未能解决你的问题,请参考以下文章