关于瓦力机器人的设计构想
Posted 梦影樱飞
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了关于瓦力机器人的设计构想相关的知识,希望对你有一定的参考价值。

想法来源
此想法来源于电影《机器人总动员》中的“瓦力”这一形象,电影中的瓦力就以一个可以自行移动的垃圾清理机器人。我产生这一想法的原因是,我们的实验室中已经有相对应的雏形,智能垃圾桶项目已经成熟,智能小车项目也在发展中(硬件设施已具备),果园采摘机器人项目我们只需要使用其机械臂并对其进行改造即可。
在一个项目开发项目的开发中,我们清楚地知道,一代产品根本无法满足我们设计的需要,所以目前我们只针对第一代产品进行初步的设计,我们对第一代产品的设想就是它可以满足:1、可以自行移动、自动避障;2、可以主动抓取垃圾;3、可以自动进行垃圾分类。满足了这三点,我们的第一代产品的设计就算是成功了。
一、可以自行移动、自动避障
这个项目往简单了来看,就是小车+垃圾桶+机械臂。如果想让垃圾桶实现自行移动、自动避障,首先我们需要一个小车底盘,对于小车底盘的最基本要求就是轮子必须足够大但又不能太大,然后就是动力足,我们在设计试验阶段首先选用一款直流减速电机,来给垃圾清理机器人提供一个十分可靠的动力,为了可以使它适应全地形运动,经过小组研究讨论,把轮式的小车底盘改装成履带式的小车底盘。履带式的小车底盘就可以让我们的机器人在一定的条件下进行全地形的运动,(这是针对于一般的台阶来说的,只需要让履带的前端可以高于台阶,在动力足够的情况下只需要有受力点,我们的机器人就可以爬上台阶。而轮式的小车我们必须让轮子轴心的高度高于台阶的高度在动力足够的情况下才有可能爬上台阶,另一方面,轮式车可能会在湿滑的路面上出现打滑的情况,而履带式则可以适应绝大多数路面情况。)我们在使用履带式的底盘结构的同时,还需要把机器人的重心降低,至少机器人前部的重心必须降低,防止在车身倾斜严重的情况下出现后翻、侧倾的情况。另外,我们通过STM32单片机控制传感器使其拥有超声波避障和红外避障的功能。这样就可以在一个静态的环境情况下达到规避障碍物的效果。
未来对机器人的设想是可以通过视觉完成一切的避障操作。

二、可以自动抓取垃圾
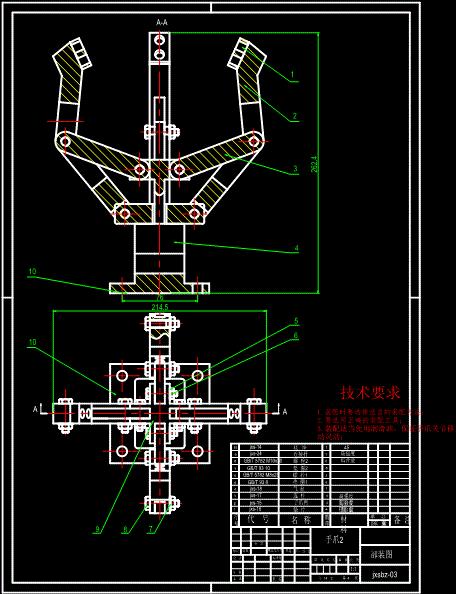
需要做到这一点我就必须得采用机械臂,机械臂上得安装有温度传感器、测距模块,便于对垃圾进行精准定位。
机械臂只是对抓取的垃圾对象进行方向和位置的控制,这是相对简单的操作。要考虑的主要问题笔者觉得应该是抓取垃圾的大小和重量。目前在实验室阶段我们只能把目光投放在体积小重量轻的垃圾身上,例如:纸团、果皮、易拉罐、电池等。如果可以做到可以根据不同垃圾的分量去决定夹取的力度就更好了,但是换个角度想一下,我们抓取的对象是垃圾,只要是不对我们的机械臂造成损伤,也能抓起来垃圾就已经满足一个垃圾清理机器人的所需要的条件了。
三、可以自动进行垃圾分类
垃圾分类对于垃圾分类机器人来说这是个核心技术。
一开始的想法是在机械臂上安装摄像头分辨垃圾的种类,直接分类,避免再到桶内进行分类,增大垃圾桶的体型。之前的设想是直接把垃圾放到桶内,在桶内通过摄像头识别垃圾种类再通过云台对垃圾进行分类;现在觉得这种设计对于机器人来说会在一定程度上增大机器人的体型,使机器人显得格外的笨重。所以就把摄像头的视觉模块放在机械臂上直接在机械臂上完成对垃圾进行分类的操作。
对于垃圾分类,采用深度学习来完成。根据以往的对垃圾分类的经历来说,在积累垃圾图片库时,一定要多花时间,多找一些图片,尽量不在百度等搜索引擎上搜索,也不要用爬虫,因为这样找到的图片看似很多,但是大部分都是一样的,对于我们视觉来说不是一件好事情,不如麻烦一些,多找些朋友去为你搜集各种垃圾的图片,这样你可以拍到垃圾各种情况下的照片。虽然很麻烦,但是对于提高垃圾分类准确度来说太实用了。另外,资源越大越好,越真实越好,想想如果给你20G的资源,垃圾分类的准确度至少能提到95%。
结束语
笔者在这里仅仅是分享一下自己的想法,并没有实际操作,也没有技术指导,如果觉得可以实现,欢迎评论,同时也欢迎大家提出自己的设计灵感,可以的话大家可以一起实现。
以上是关于关于瓦力机器人的设计构想的主要内容,如果未能解决你的问题,请参考以下文章