SLAM算法总结——经典SLAM算法框架总结
Posted Jichao_Peng
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了SLAM算法总结——经典SLAM算法框架总结相关的知识,希望对你有一定的参考价值。
SLAM算法总结——经典SLAM算法框架总结
SLAM算法总结——经典SLAM算法框架总结
从研究生接触SLAM算法到现在也有两三年了,期间学习了很多经典的SLAM算法框架并写了一些相关的博客,本篇博客主要目的是想将这些博客进行一个简单总结用于查漏补缺。首先,按照我的理解,我梳理了如下一个思维导图,如果读者发现有什么需要补充或者纠正的欢迎随时交流:
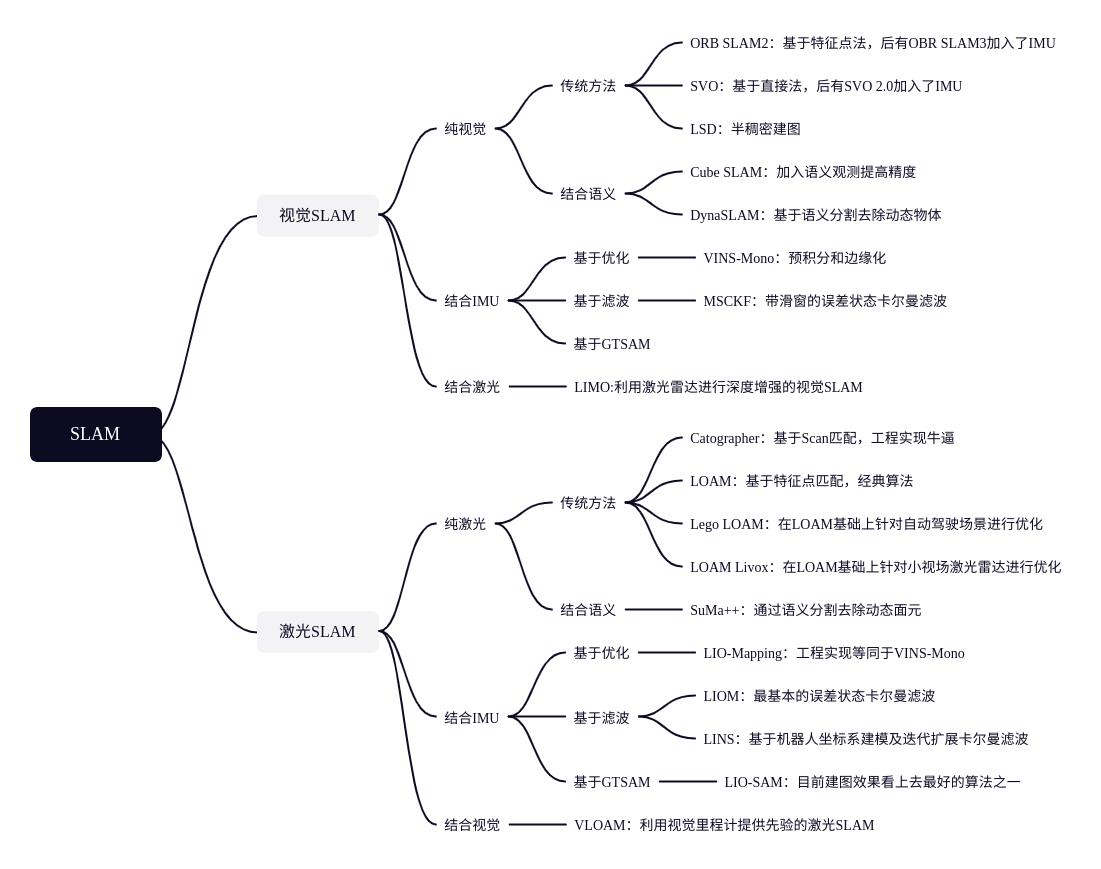
按照分类,我们先来讲讲视觉SLAM,视觉SLAM算法相对于激光SLAM算法的特点是信息更加丰富,由于是在二维提取特征点,因此通常可以达到更高的频率,但也正是因为信息丰富,因此更容易引入噪声,加上缺乏三维信息,导致视觉SLAM算法的鲁棒性在平均水平上要低于激光SLAM,尤其是通过传统特征进行定位和建图,在工程应用上相对受限,当前一个热门的方向是通过网络提取更加鲁棒的特征,例如Super Pixel、Super Clue,或者直接根据网络输出定位和建图结果,这也是我之后希望进一步了解的方向:
以下是一些视觉SLAM的博客链接,感兴趣的同学可以了解下:
纯视觉方案:
视觉SLAM总结——ORB SLAM2中关键知识点总结
视觉SLAM总结——SVO中关键知识点总结
视觉SLAM总结——LSD SLAM中关键知识点总结
结合IMU方案:
VINS-Mono关键知识点总结——前端详解
VINS-Mono关键知识点总结——边缘化marginalization理论和代码详解
VINS-Mono关键知识点总结——预积分和后端优化IMU部分
学习MSCKF笔记——前端、图像金字塔光流、Two Point Ransac
学习MSCKF笔记——四元数基础
学习MSCKF笔记——真实状态、标称状态、误差状态
学习MSCKF笔记——后端、状态预测、状态扩增、状态更新
结合激光方案:
视觉激光融合——VLOAM / LIMO算法解析
我是先入门的视觉SLAM再接触的激光SLAM,因此激光SLAM我接触的时间并不是很长,但是激光SLAM和视觉SLAM的基本方法是一样的,只是在传感器输入处理上会稍有不同,正如上面提到的,激光SLAM在工程应用方面会更加成熟,以下是一些激光SLAM的博客链接:
纯激光方案:
学习LOAM笔记——特征点提取与匹配
结合IMU方案:
激光IMU融合——LIO-Mapping / LIOM / LINS / LIO-SAM算法解析
结合视觉方案:
视觉激光融合——VLOAM / LIMO算法解析
在视觉和激光结合的方向上,在2021年的ICRA上还有一片LVI-SAM,工程实现上是VINS-Mono和LIO-SAM的结合。
关于SLAM基础知识点的总结博客链接如下:
视觉SLAM总结——视觉SLAM十四讲笔记整理
视觉SLAM总结——视觉特征子综述
视觉SLAM总结——后端总结
视觉SLAM总结——视觉SLAM面试题汇总
多视图几何总结——基础矩阵、本质矩阵和单应矩阵的自由度分析
多视图几何总结——等距变换、相似变换、仿射变换和射影变换
多视图几何总结——从本质矩阵恢复摄像机矩阵
多视图几何总结——摄像机模型
多视图几何总结——三角形法
多视图几何总结——单应矩阵和基础矩阵的兼容关系
概率机器人总结——粒子滤波先实践再推导
概率机器人总结——(扩展)卡尔曼滤波先实践再推导
概率机器人总结——占用栅格地图先实践再推导
工具相关的博客链接如下:
Eigen有哪些需要注意的操作
Ceres Solver Document学习笔记
GTSAM Tutorial学习笔记
以上是我当前对SLAM算法框架以及一些基础知识的总结,学无止境,后面慢慢补充~
以上是关于SLAM算法总结——经典SLAM算法框架总结的主要内容,如果未能解决你的问题,请参考以下文章