强化学习笔记: MDP - Policy iteration
Posted UQI-LIUWJ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了强化学习笔记: MDP - Policy iteration相关的知识,希望对你有一定的参考价值。
1 Policy iteration介绍
Policy iteration式马尔可夫决策过程 MDP里面用来搜索最优策略的算法
Policy iteration 由两个步骤组成:policy evaluation 和 policy improvement。
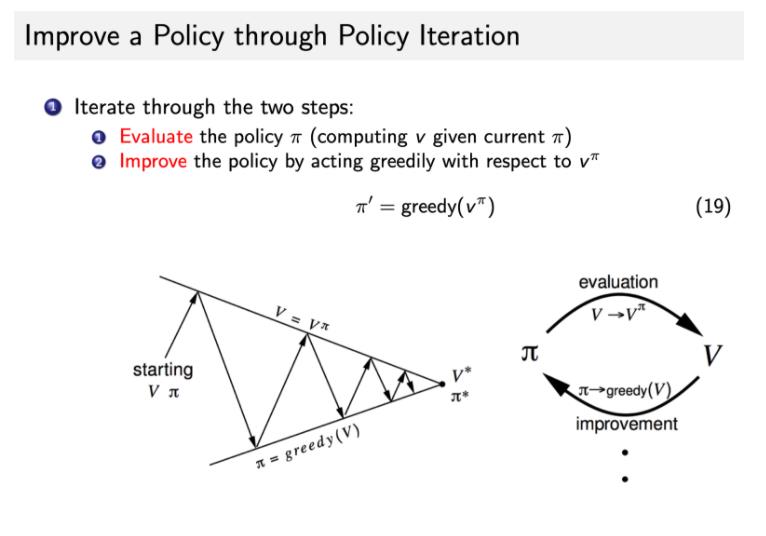
2 Policy iteration 的两个主要步骤
第一个步骤是 policy evaluation,当前我们在优化这个 policy π,我们先保证这个 policy 不变,然后去估计它出来的这个价值。即:给定当前的 policy function 来估计这个 v 函数
第二个步骤是 policy improvement,得到 v 函数过后,我们可以进一步推算出它的 Q 函数。
得到 Q 函数过后,我们直接在 Q 函数上面取极大化,通过在这个 Q 函数上面做一个贪心的搜索来进一步改进它的策略。


这两个步骤就一直是在迭代进行,所以在 policy iteration 里面,在初始化的时候,我们有一个初始化的 V和 π ,然后就是在这两个过程之间迭代。
3 Q-table
把 Q 函数看成一个 Q-table,得到 Q 函数后,
Q-table也就得到了。:
- 横轴是它的所有状态,
- 纵轴是它的可能的 action。
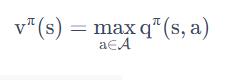
那么对于某一个状态,每一列里面我们会取最大的那个值,最大值对应的那个 action 就是它现在应该采取的 action。
所以 arg max 操作就说在每个状态里面采取一个 action,这个 action 是能使这一列的 Q 最大化的那个动作。
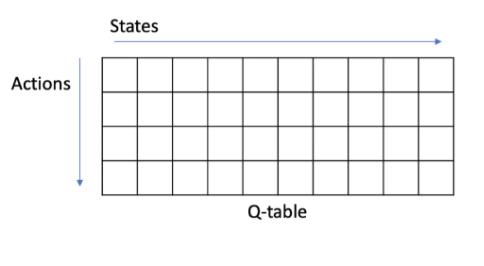
当一直在采取 arg max 操作的时候,我们会得到一个单调的递增。
通过采取这种 greedy,即 arg max 操作,我们就会得到更好的或者不变的 policy,而不会使它这个价值函数变差。
所以当这个改进停止过后,我们就会得到一个最佳策略
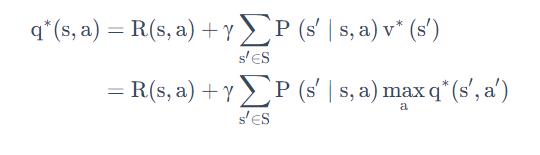
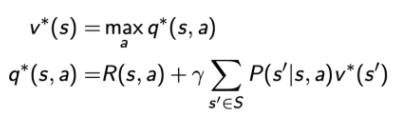
4 Bellman Optimization Equation
对于MDP,我们知道有这样的式子

当改进停止的时候,action的决策已经确定,此时只有一个action的
为1,其余的均为0【这样可以使得q(s,a)最大】,所以我们可以得到一个新的等式:
这个等式被称为 Bellman optimality equation,当 MDP 满足 Bellman optimality equation 的时候,整个 MDP 已经到达最佳的状态。
它到达最佳状态过后,对于这个 Q 函数,取它最大的 action 的那个值,就是直接等于它的最佳的 value function。
这个等式只有当整个状态已经收敛,得到一个最佳的 policy 的时候,才会满足。
在满足Bellman optimality equation后,我们重新审视以下Q函数的Bellman expectation equation:
把bellman optimization equation 代入,有:
这个式子就是Q-learning 的转移方程

同样,对于value function的转移函数,
通过
可以推出:
【
原来的式子是:
】


以上是关于强化学习笔记: MDP - Policy iteration的主要内容,如果未能解决你的问题,请参考以下文章