ORB_SLAM3安装运行&性能测试对比
Posted 02468.
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ORB_SLAM3安装运行&性能测试对比相关的知识,希望对你有一定的参考价值。
目录
一、安装
环境:ubtuntu16
第三方库:Pangolin opencv3.2 Eigen3
(1)下载源码
https://github.com/UZ-SLAMLab/ORB_SLAM3ORB-SLAM3论文地址:https://arxiv.org/abs/2007.11898
(2)编译
cd ORB-SLAM3/
chmod +x build.sh
sudo ./build.sh
(3)遇到问题
/home/one/catkin_ws/src/ORB_SLAM3/src/LocalMapping.cc:628:49: error: no match for ‘operator/’ (operand types are ‘cv::Matx<float, 3, 1>’ and ‘float’) x3D = x3D_h.get_minor<3,1>(0,0) / x3D_h(3);
解决方法:找到对应文件所在行,把x3D = x3D_h.get_minor<3,1>(0,0) / x3D_h(3)换成
x3D = cv::Matx31f(x3D_h.get_minor<3,1>(0,0)(0) / x3D_h(3), x3D_h.get_minor<3,1>(0,0)(1) / x3D_h(3), x3D_h.get_minor<3,1>(0,0)(2) / x3D_h(3));
二、运行
下载数据集&测试
kmavvisualinertialdatasets – ASL Datasets
(1)非ROS下用的EUROC数据集MH05
单目:
./Examples/Monocular/mono_euroc Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml /home/one/dataset/mav0/cam0/data Examples/Monocular/EuRoC_TimeStamps/MH04.txt单目+IMU:
./Examples/Monocular-Inertial/mono_inertial_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular-Inertial/EuRoC.yaml ./dataset ./Examples/Monocular-Inertial/EuRoC_TimeStamps/MH05.txt双目:
./Examples/Stereo/stereo_euroc ./Vocabulary/ORBvoc.txt ./Examples/Stereo/EuRoC.yaml ./dataset ./Examples/Stereo/EuRoC_TimeStamps/MH05.txt
双目+IMU:
./Examples/Stereo-Inertial/stereo_inertial_euroc ./Vocabulary/ORBvoc.txt ./Examples/Stereo-Inertial/EuRoC.yaml ./dataset ./Examples/Stereo-Inertial/EuRoC_TimeStamps/MH05.txt(2)ROS下用的EUROC数据集MH04
双目:
rosrun ORB_SLAM3 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml truerosbag play MH_04_difficult.bag /cam0/image_raw:=/camera/left/image_raw /cam1/image_raw:=/camera/right/image_raw双目+imu:
rosrun ORB_SLAM3 Stereo_Inertial Vocabulary/ORBvoc.txt Examples/Stereo-Inertial/EuRoC.yaml truerosbag play MH_04_difficult.bag /cam0/image_raw:=/camera/left/image_raw /cam1/image_raw:=/camera/right/image_raw /imu0:=/imu注意:这里EUROC数据集是没有深度图的,暂时不跑RGB-D
三、 EVO安装&使用
(1)安装
sudo apt install python-pip
pip install evo --upgrade --no-binary evo(2)使用
单轨迹:
evo_traj euroc data.csv --plot因为这里.csv文件有17列数据,与.txt对不齐,所以把data.csv转换成.tum格式
evo_traj euroc data.csv --save_as_tum真实轨迹与运行轨迹-对齐:
evo_traj tum KeyFrameTrajectory.txt --ref=data.tum -p --plot_mode xyz -a --correct_scale计算ape-绝对位姿误差
evo_ape tum KeyFrameTrajectory.txt data.tum -p --plot -s --correct_scale -a --align -v --save_results ape.zip关于evo的更多用法可自行搜索
四、与ORB_SLAM2性能对比
(1)单目-非ROS下
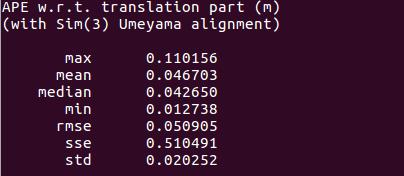
ORB_SLAM3
单目:

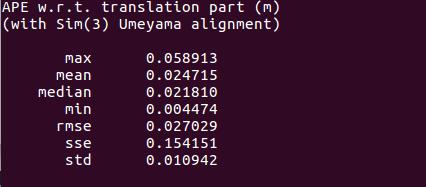
单目+IMU:
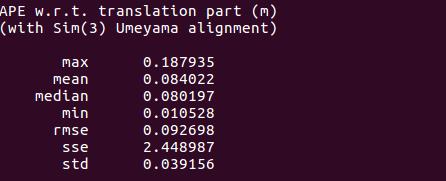
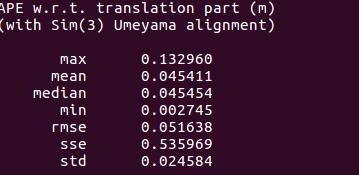
ORB_SLAM2
单目:
(2)双目-ROS下
为了生成轨迹文件,这里在ROS/ORB_SLAM3/src下的.cc文件对应位置加上生成轨迹的代码
ros::spin();
// Stop all threads
SLAM.Shutdown();
// Save camera trajectory
SLAM.SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory_TUM_Format.txt");
SLAM.SaveTrajectoryTUM("FrameTrajectory_TUM_Format.txt");
SLAM.SaveTrajectoryKITTI("FrameTrajectory_KITTI_Format.txt");
ros::shutdown();ORB_SLAM3
双目:
双目+imu:
ORB_SLAM2
五、总结
通过对比结果可以得到以下结论:
1-跑单目MH05,ORB_SLAM3与ORB_SLAM2表现差不多,ORB_SLAM3加了IMU之后,跑的时候更稳定,精度有所下降。
2-跑双目MH04,ORB-SLAM2会有一部分轨迹丢失,而ORB_SLAM3比ORB_SLAM2稳定,加了IMU之后,精度提升。
补充:
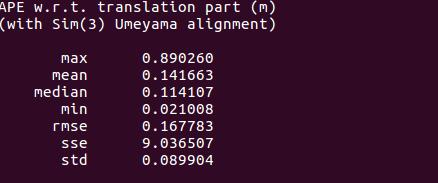
RGBD的精度对比-ATE&RPE
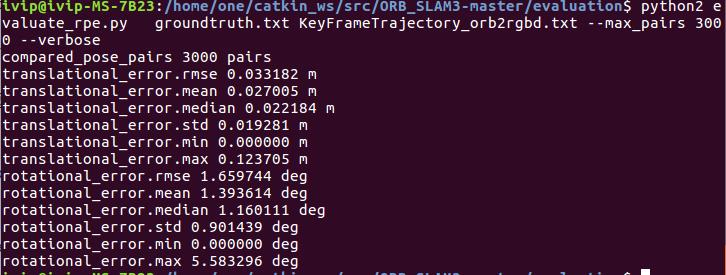
(1)TUM数据集-rgbd_dataset_freiburg1_desk
ORB_SLAM3

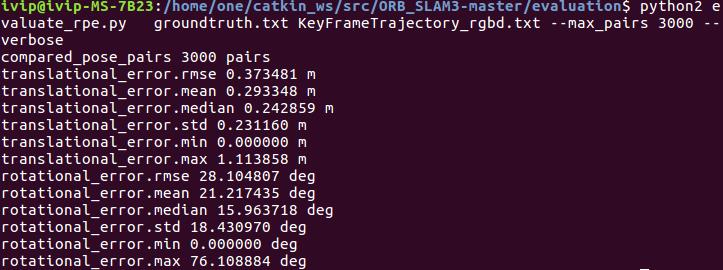
ORB_SLAM2

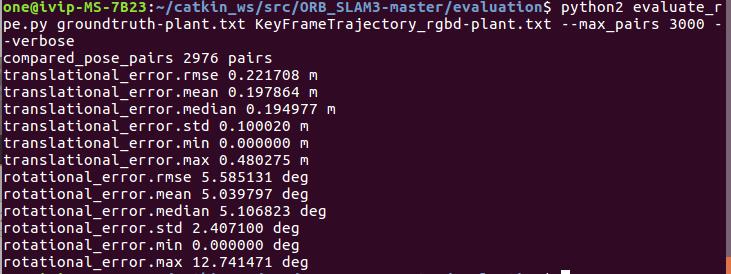
 (2)TUM数据集-rgbd_dataset_freiburg1_plant
(2)TUM数据集-rgbd_dataset_freiburg1_plant
ORB_SLAM3

ORB_SLAM2

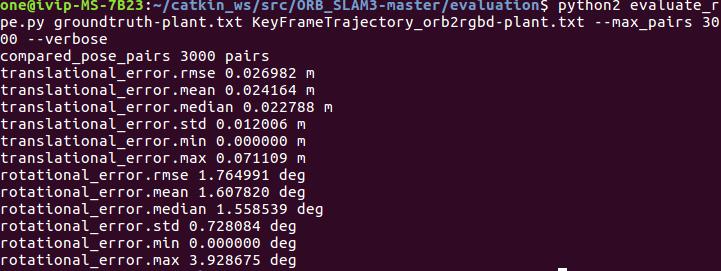
从测试结果上来看,ORB_SLAM3在TUM运行RGB-D效果没有ORB_SLAM2的好。
以上是关于ORB_SLAM3安装运行&性能测试对比的主要内容,如果未能解决你的问题,请参考以下文章