双目立体视觉传感器数据读取与绘图PlotJuggler
Posted Techblog of HaoWANG
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了双目立体视觉传感器数据读取与绘图PlotJuggler相关的知识,希望对你有一定的参考价值。

项目地址:GitHub - stereolabs/zed-examples: ZED SDK Example projects
官方文档:Stereolabs Docs: API Reference, Tutorials, and Integration
ROS ZED SDK: Getting IMU and Sensor Data in ROS | Stereolabs
1. Getting IMU and Sensor Data in ROS
In this tutorial, you will learn how to display ZED cameras sensor data using PlotJuggler and subscribe to the sensors data streams.
Sensor Data visualization with PlotJuggler
In this tutorial, you will learn in detail how to configure the PlotJuggler tool to display data values in multiple dynamic live plots.
The package provides two launch files:
plot_sensors_zedm.launch: launches the ZED node preconfigured for the ZED-M and PlotJuggler preconfigured to show ZED-M sensor dataplot_sensors_zed2.launch: launches the ZED node preconfigured for the ZED2 and PlotJuggler preconfigured to show ZED2 sensor dataplot_sensors_zed2i.launch: launches the ZED node preconfigured for the ZED2i and PlotJuggler preconfigured to show ZED2i sensor data
PlotJuggler · GitHub https://github.com/PlotJuggler
https://github.com/PlotJuggler
 https://github.com/PlotJuggler/plotjuggler-ros-plugins
https://github.com/PlotJuggler/plotjuggler-ros-plugins2. 编译PlotJuggler
ROS plugins for PlotJuggler
PlotJuggler works great with ROS, but it is not itself a "ROS" application.
ROS is supported through external plugins that can be found in this repository.
Existing Plugins
- DataLoader for rosbags (ROS / ROS2).
- ROS topic subscriber (ROS / ROS2).
- Logs/rosout visualizer (ROS only).
- Re-publisher similar to
rosbag play(ROS only).Install with Debians (TODO)
Install PlotJuggler and its ROS plugins with:
sudo apt install ros-${ROS_DISTRO}-plotjugglerTo launch PlotJuggler on ROS, use the command:
rosrun plotjuggler plotjuggleror, if have ROS2 installed:
ros2 run plotjuggler plotjugglerHow to compile PlotJuggler from source
Create a catkin workspace and clone the repositories:
mkdir -p ~/ws_plotjuggler/src cd ~/ws_plotjuggler/src git clone https://github.com/PlotJuggler/plotjuggler_msgs.git git clone https://github.com/facontidavide/PlotJuggler.git git clone https://github.com/PlotJuggler/plotjuggler-ros-plugins.gitNow, it is time to compile:
cd ~/ws_plotjuggler rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y catkin buildEnjoy:
source devel/setup.bash roslaunch plotjuggler_ros plotjuggler.launch
3. 使用ZED和PlotJuggler绘制传感器数据
启动 ZED节点:plot_sensor_zed2.launch
<?xml version="1.0"?>
<!--
Copyright (c) 2020, STEREOLABS.
All rights reserved.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-->
<launch>
<arg name="svo_file" default="" /> <!-- <arg name="svo_file" default="path/to/svo/file.svo"> -->
<arg name="stream" default="" /> <!-- <arg name="stream" default="<ip_address>:<port>"> -->
<arg name="camera_model" default="zed2" />
<!-- Launch ZED camera wrapper -->
<include file="$(find zed_wrapper)/launch/$(arg camera_model).launch">
<arg name="camera_model" value="$(arg camera_model)" />
<arg name="svo_file" value="$(arg svo_file)" />
<arg name="stream" value="$(arg stream)" />
</include>
<!-- Launch RQT Plot -->
<node name="plotjuggler"
pkg="plotjuggler"
type="plotjuggler"
args="-n -l $(find zed_sensors_sub_tutorial)/cfg/$(arg camera_model).xml"
output="screen"
/>
</launch>
软件使用:
1. 启动plotjuggler节点
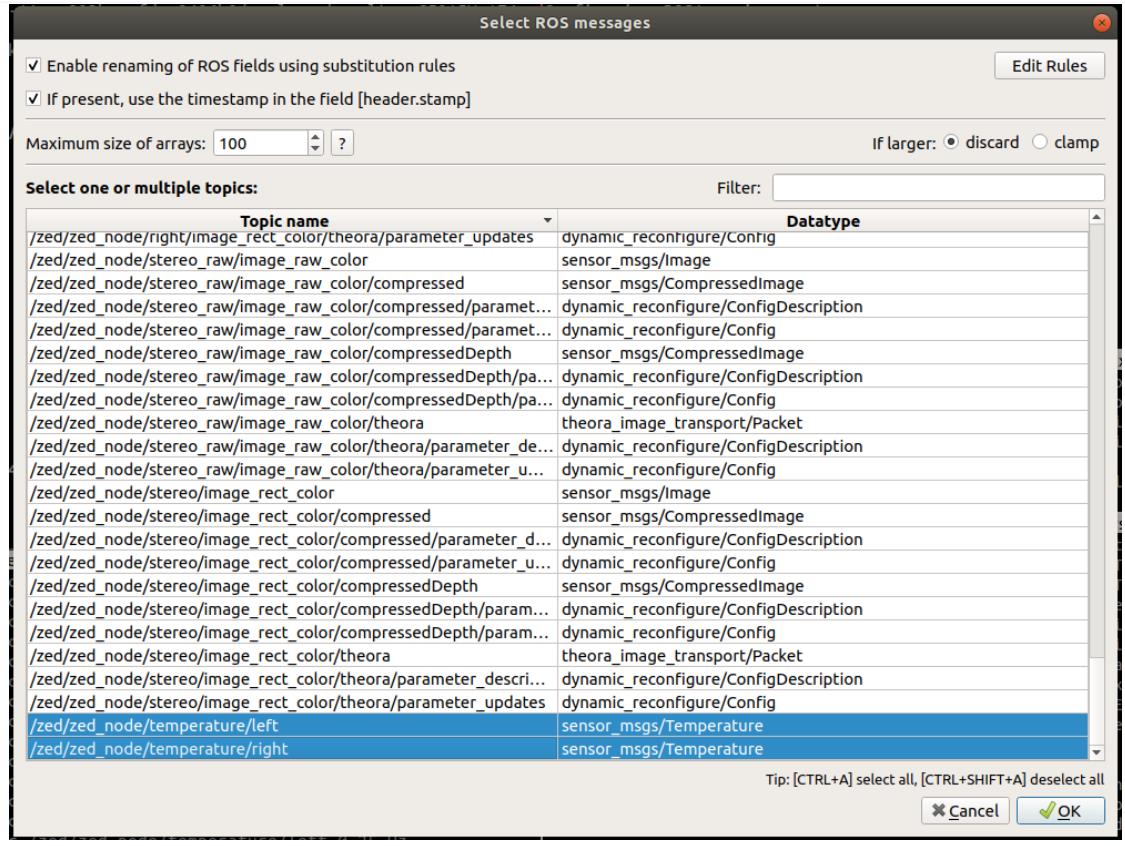
2. 订阅ZED传感器节点数据
3. 绘图
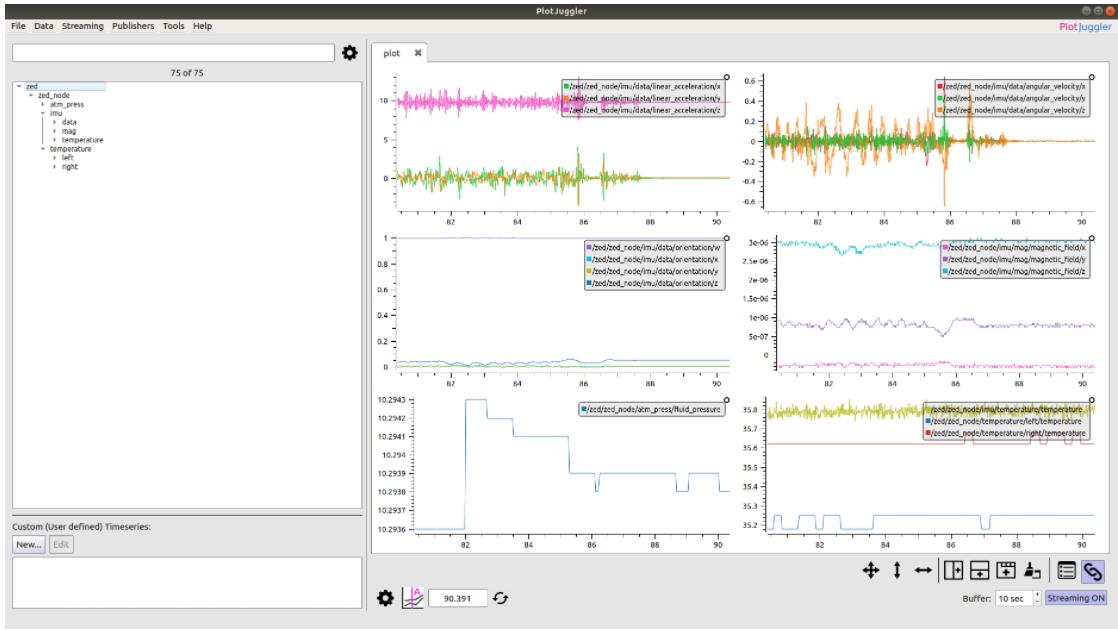
On the left you can find the list of all the available subscribed topics, on the right the live plots:
- accelerometer data on the top right
- gyroscope data on top left
- orientation in quaternion form on middle left
- magnetometer data on middle right
- barometer data on bottom left
- temperature data on bottom right
以上是关于双目立体视觉传感器数据读取与绘图PlotJuggler的主要内容,如果未能解决你的问题,请参考以下文章