AirSim动态 | 安装配置AirSim环境
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了AirSim动态 | 安装配置AirSim环境相关的知识,希望对你有一定的参考价值。
前言 经过2021年最后一个长假期,我们终于带来了每周一Airsim动态更新,在上期内容我们完成了使用Airsim的必要程序的安装,以及地图的下载。在后续需要根据自己所使用的编程程序下载不同软件进行配合。所以第二部分我们将使用Python进行有关无人机飞正方形,飞圆形的Demo展示。 还没有看过的同学可以点击下方链接进行查看:AirSim动态 | 安装配置AirSim环境(一)
目录: 5. 安装(二) 6. Demo展示 7. 安装(一)
五、安装(二) 如果想通过代码控制无人机,还需要安装别的软件进行控制,这里我们选择使用Python进行编程,需要下载的软件是Anaconda和Pycharm,而这里是使用Anaconda对python环境进行管理。
5.1 Anaconda安装与配置
官网地址:
https://www.anaconda.com/products/individual-d
下载:
选择【Product-Individual Edition】,
选择Windows版本下载。
按着步骤不用更改,一路安装完成后,在菜单栏中出现了几个应用:
- Anaconda Navigator:图形用户界面,用于管理python环境。
- Anaconda PowerShell Prompt:命令行工具。
- Jupyter notebook:基于web的交互式计算环境,可以编辑markdown,用于展示数据分析的过程。
- qtconsole:一个可执行 IPython 的仿终端图形界面程序。
- spyder:一个使用Python语言、跨平台的、科学运算集成开发环境。
然而配置Python环境,只需要应用到Anaconda Navigator和Anaconda PowerShell Prompt这两个工具。
配置Python环境 菜单搜索Anaconda Navigator,打开软件,点击【environment-Create】配置一个新的环境,自行命名,这里命名为“Airsim”,Python选择的3.8版本,点击创建。  图1 创建一个新环境
图1 创建一个新环境
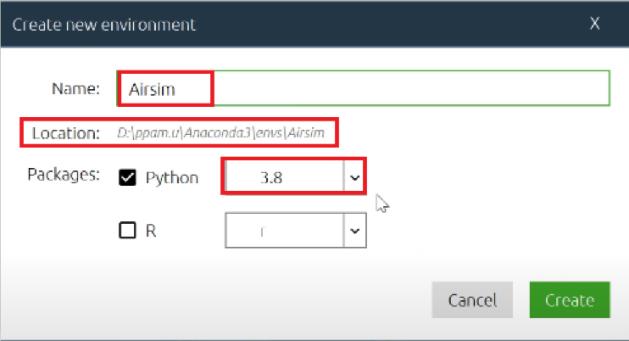 图2 新环境初始设置
图2 新环境初始设置
注意:这里的Location地址位置非常重要,需要记得新配置的环境在那个路径下。
创建第三方库 创建好后直接通过pip命令安装msgpack-rpc-python和airsim两个库。首先点击新建好环境(Airsim)右边的小三角,再点击【Open Terminal】打开终端; 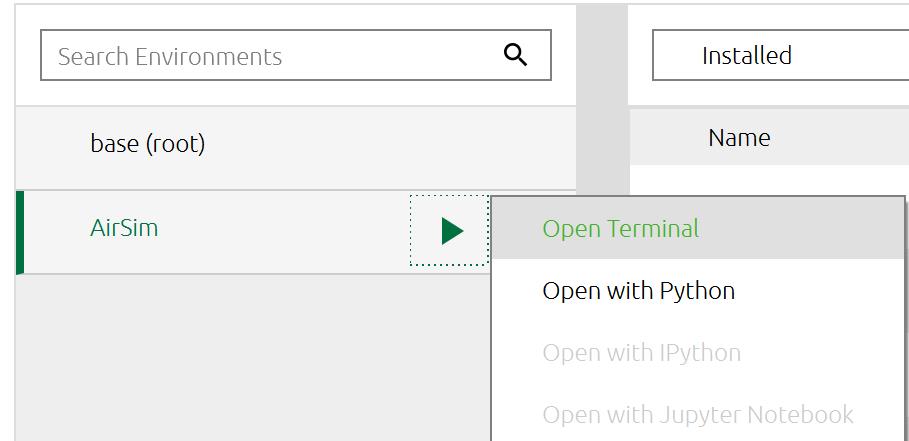
图3 打开终端 在终端中输入以下命令,进行安装两个库。 pip install msgpack-rpc-python pip install airsim
5.2 Pycharm安装与配置 官方网址:https://www.jetbrains.com/pycharm/download/#section=windows 下载安装:有账号的可以选择professional版本,没有账号直接选择community免费版本。 安装除了安装路径自定义,其余都默认直接安装。
配置环境 这里需要配置Anaconda配置出的环境,还记得上个步骤专门划出来的路径location吗,就是用在这。以下具体步骤: 打开安装好的Pycharm,点击【New Project】 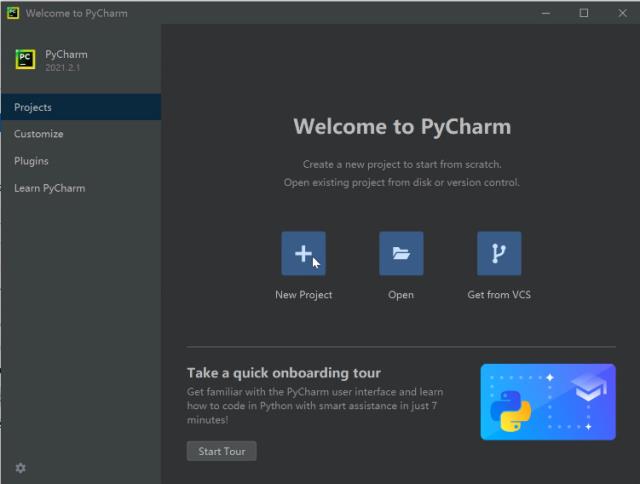 图4 打开PyCharm
图4 打开PyCharm
勾选“Previously configured interper”,并点 击右边扩展。
击右边扩展。 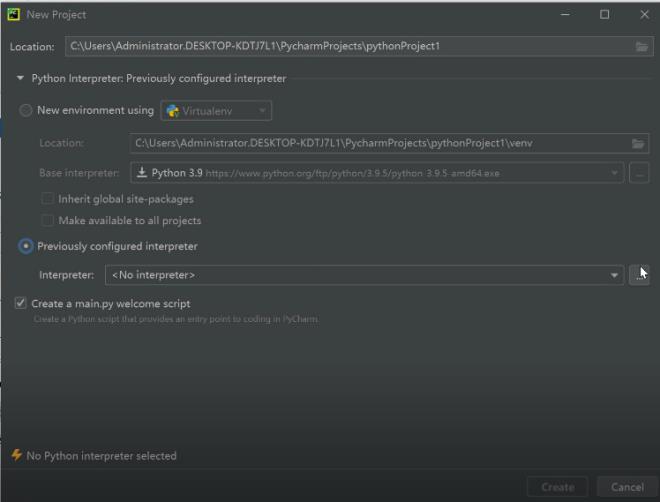 图5 进行环境配置 点击System Interpreter,点击扩展,选择上个步骤配置出的环境(Airsim)路径里面的Python.exe。比如这里是【D:\\ppam.u\\Anaconda3\\envs\\AirSim\\python.exe】。
图5 进行环境配置 点击System Interpreter,点击扩展,选择上个步骤配置出的环境(Airsim)路径里面的Python.exe。比如这里是【D:\\ppam.u\\Anaconda3\\envs\\AirSim\\python.exe】。 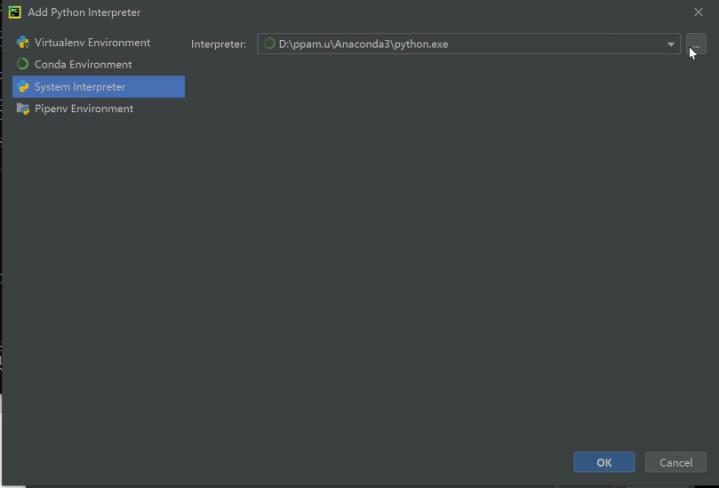
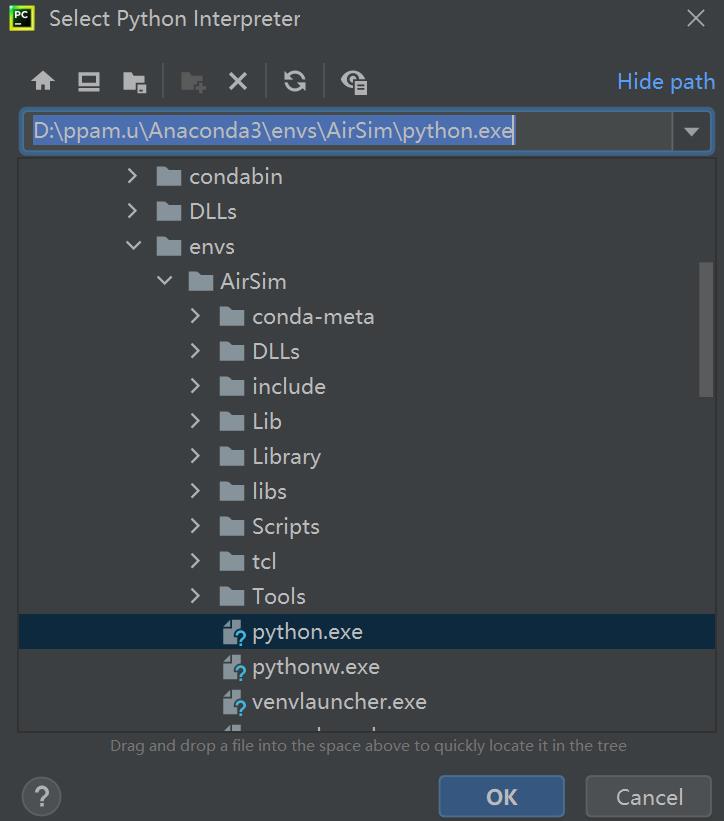 图6 Anaconda与PyCharm的环境配置
图6 Anaconda与PyCharm的环境配置
然后就可以创建你的项目了,注意这里的location是指你的Python代码位置,可自定义。 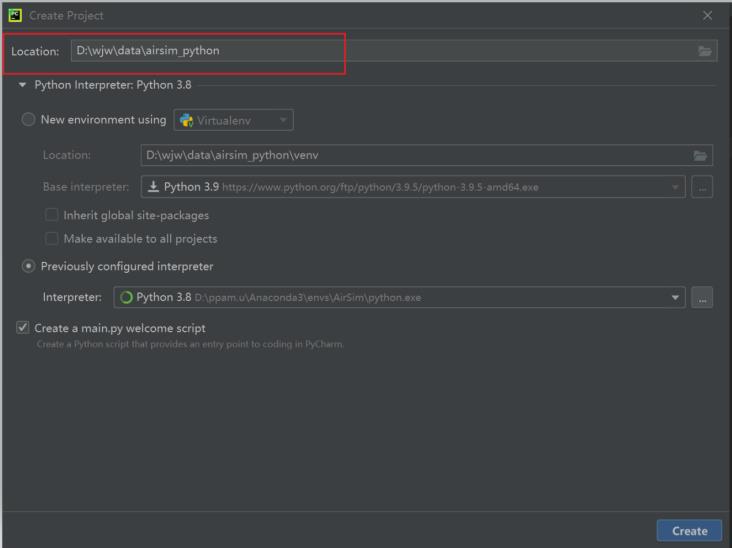 图7 创建新工程时需要修改的路径
图7 创建新工程时需要修改的路径
通过【右键点击新建项目-New-Python File】,就可以构建自己的Python代码。 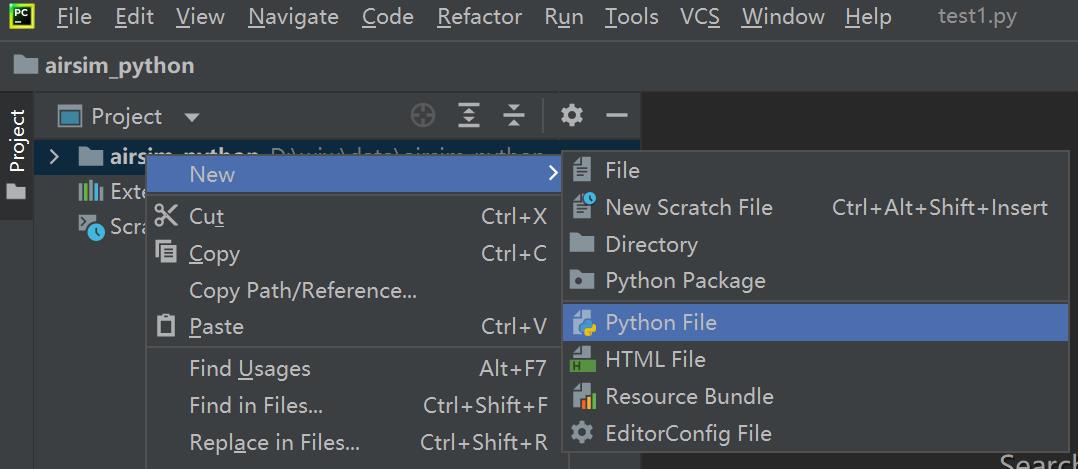 图8 在新项目中添加Python文件
图8 在新项目中添加Python文件
六、Demo演示 通过上述就是所有基本配置,下面可以根据两个代码demo自己运行一下程序。
6.1 无人机飞正方形demo 代码:  图33 无人机飞正方形代码 效果:https://v.youku.com/v_show/id_XNTgwODMxNDYwMA==.html
图33 无人机飞正方形代码 效果:https://v.youku.com/v_show/id_XNTgwODMxNDYwMA==.html
6.2 无人机飞圆形demo 代码: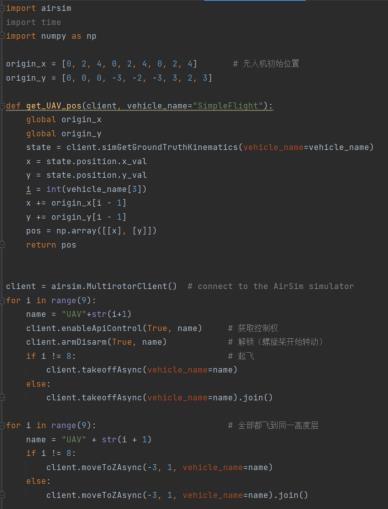
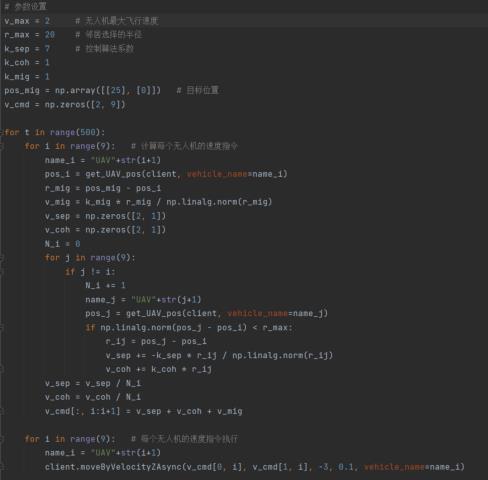
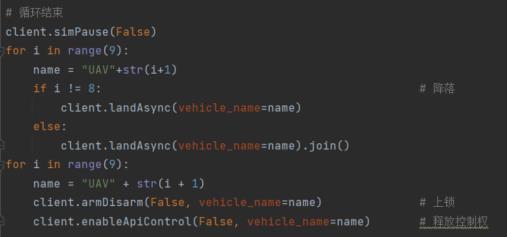 图34 无人机飞圆形代码 效果:https://v.youku.com/v_show/id_XNTgwODQwOTk4OA==.html
图34 无人机飞圆形代码 效果:https://v.youku.com/v_show/id_XNTgwODQwOTk4OA==.html
结束语 以上内容均是参考了知乎大佬【宁子安】和AirSim的官方wiki内容,请大家多提意见,如有不对定当及时修改。以下是我安装过程中遇到的一些问题,希望大家有遇到问题解决了也提出来,此文档作为定时更新文档放在那那那上。最后,阿木实验室面向所有AirSim开发者及爱好者发起招募,欢迎大家加入我们AirSim开发小组,一起为AirSim在无人机开源生态发展做出贡献。
作者:阿木实验室-瑶月
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!
以上是关于AirSim动态 | 安装配置AirSim环境的主要内容,如果未能解决你的问题,请参考以下文章