加州理工让无人机长出腿:走路飞行无缝切换,还能玩滑板走钢丝|Sicence子刊...
Posted QbitAl
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了加州理工让无人机长出腿:走路飞行无缝切换,还能玩滑板走钢丝|Sicence子刊...相关的知识,希望对你有一定的参考价值。
梦晨 发自 凹非寺
量子位 报道 | 公众号 QbitAI
这款双足机器人,有亿点点不一样。
最引人注目的是细腿高跟鞋,然后是双臂上的螺旋桨推进器。

这不同寻常的组合是要做什么?
先表演一个芜湖起飞,然后优雅地着陆,在走路与飞行之间平稳衔接。
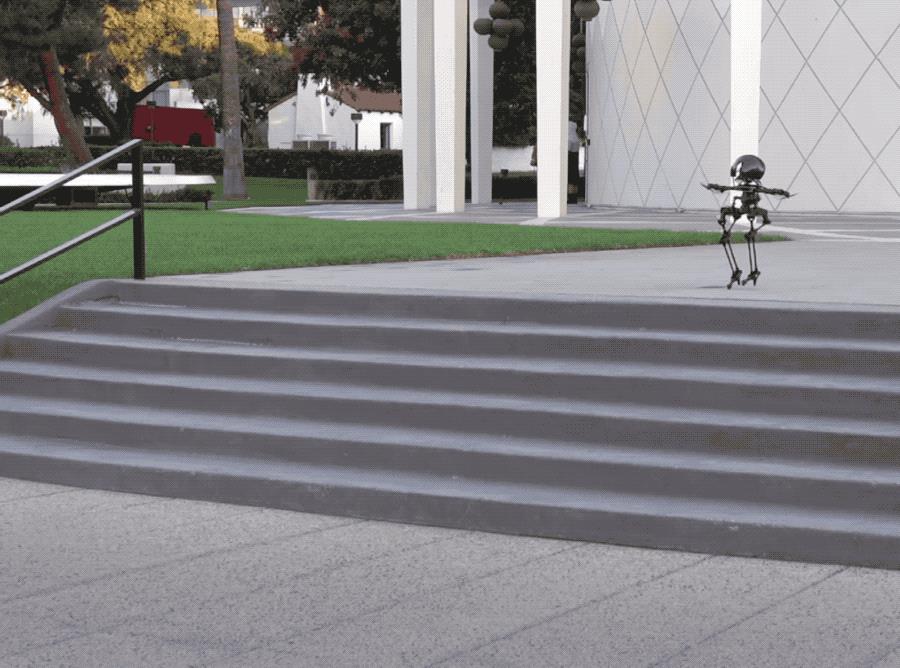
4个螺旋桨除了当作飞行的推进器以外,在地面上也负责控制机器人在所有方向上的姿态,保持平衡。
于是这只机器人就能hold住最近流行的“走扁带”运动(Slackline),类似于走钢丝。

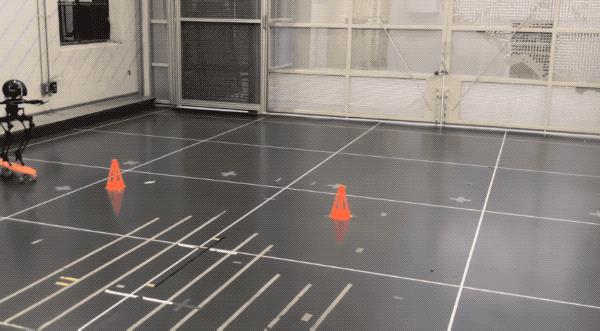
还可以挑战滑板绕桩。
这款机器人小名叫Leo,大名Leonardo。名字其实是研究人员玩的一个文字游戏,缩写自带腿无人机(LEgs ONboARD drOne)。
LEO来自加州理工大学,相关论文还登上了最新一期Science子刊Science Robotics封面。

要去做高压线检修
除了展示效果中的炫技,LEO的开发目的实际是瞄准了特定的应用场景。
也就是地面机器人和无人机难以独立完成的任务,典型的有高压线路检修和高架桥检测。
这些任务靠人去做比较危险,传统的双足机器人够不着,无人机悬停时面对气流扰动又不够稳定。
LEO靠双腿和螺旋桨的配合,只要给他一个能站的平面,哪怕是撒上油的易滑平面都能保持稳定。

和商用无人机做对比,风一来无人机就被吹跑了,而LEO还能维持在原地继续工作。
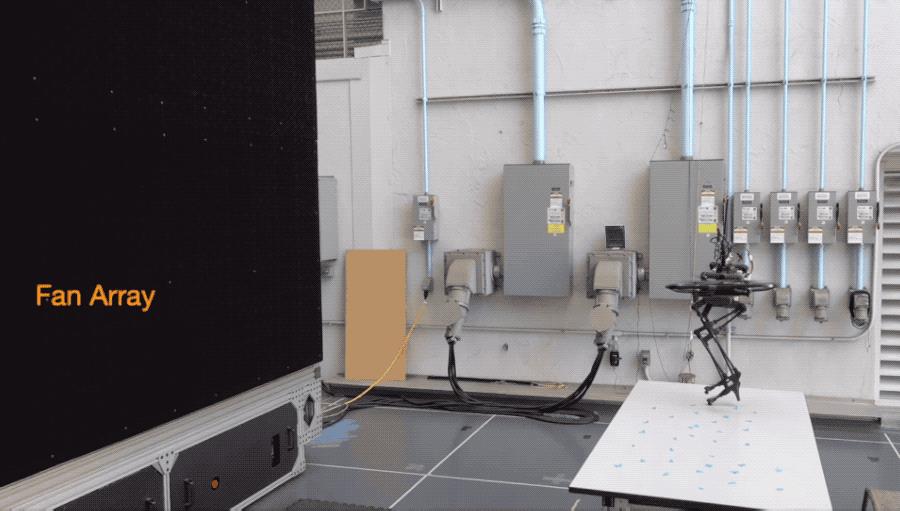
把风力加强?问题也不大。

这样的平衡能力LEO是怎么做到的?
灵感来自鸟类
论文的通讯作者,加州理工Soon-Jo Chung介绍到LEO的设计灵感来自鸟类在电线之间移动跳跃的方式。

机器人要向鸟类学习的是在飞行和行走模式之间的正确切换。
LEO机器人在飞行时保持一个平滑的轨迹,到达着陆点时要把飞行速度调整到着陆后的行走速度一致。
这样一只脚着陆后切换到走路模式,就可以沿着相同的速度平稳地继续行走。
这些控制由机器人身上搭载的状态机电路和脚上的传感器来完成。
另外想要飞起来必须做到重量轻,LEO主要部分由碳纤维材质组成,身高0.75米,重量只有2.58千克。
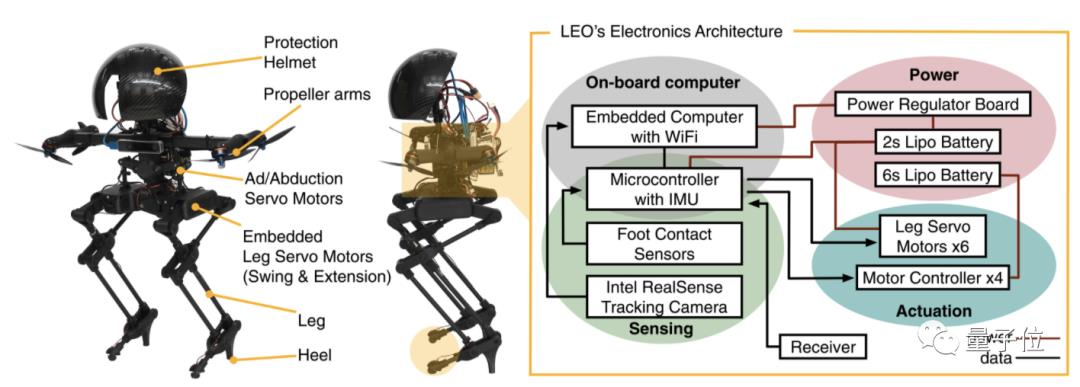
控制腿运动的是集成式直流无刷电机,装在靠近腰部的位置,这样可以减少腿的惯性。
脚尖部分是半球形的聚氨酯橡胶,这种材料摩擦系数很高可以防止滑倒。
高跟鞋的设计也是为了尽可能减少面积和重量,同时在站立不动的时候能保持稳定。
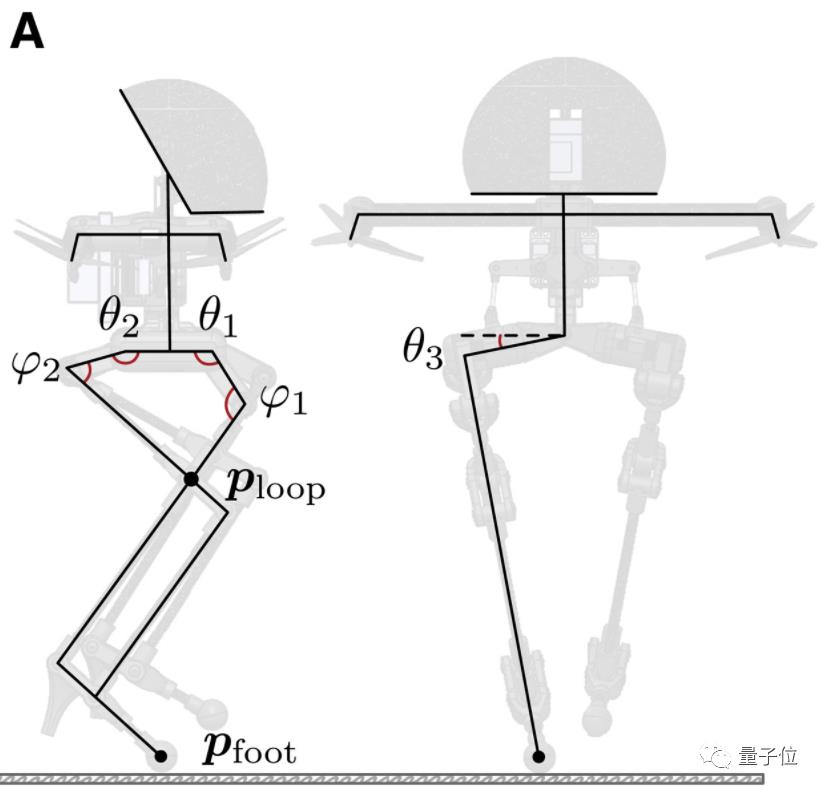
手臂上则是4个倾斜螺旋桨推进器,在不飞行的时候也可以靠推力承担一部分机身的重量,能从任意方向控制机器人姿态。
这样的轻便设计也付出了很多代价,比如行走的效率很低。
行走时总共544瓦特的功率中,有445瓦特用于控制平衡的螺旋桨推进器,双腿和其他电子设备加起来只消耗99瓦特。
用衡量运动时能耗的CoT指标 (Cost of Transportation)来表示的话,LEO以每秒20厘米速度行走时的CoT值是108,3米每秒速度飞行时CoT值可降至15。
对比人类用的生物能源CoT值则远小于1,波士顿动力的双足机器人行走时CoT值在20左右。
目前,LEO身上背的电池只能维持它进行100秒飞行或3.5分钟行走。
对此,研究人员解释到效率优化目前还不是优先级最高的任务,打算先把该有的功能都实现再考虑。
要真正去完成工作,还需要把LEO的螺旋桨短臂扩展成真正的手臂,以及用视觉算法和机器学习来增加机器人的自主性。
研究人员计划下次再做展示时要造出两个LEO机器人,然后让他们对打羽毛球和网球。
这样一个机器人要是飞起来扣球,想想还挺刺激的。
论文地址:
https://www.science.org/doi/10.1126/scirobotics.abf8136
演示视频:
https://www.youtube.com/watch?v=h3bkvVXsVFM
参考链接:
[1]https://spectrum.ieee.org/bipedal-drone-robot-caltech
[2]https://www.caltech.edu/about/news/leonardo-the-bipedal-robot-can-ride-a-skateboard-and-walk-a-slackline
以上是关于加州理工让无人机长出腿:走路飞行无缝切换,还能玩滑板走钢丝|Sicence子刊...的主要内容,如果未能解决你的问题,请参考以下文章
无缝切地图的3D赛车游戏火了,小哥花16个月用JS打造,浏览器免费就能玩
Cesium入门12 - Camera Modes - 相机模式