kmeans和Dbscans将相邻的轮廓聚类
Posted 利弗莫尔_truefan
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了kmeans和Dbscans将相邻的轮廓聚类相关的知识,希望对你有一定的参考价值。
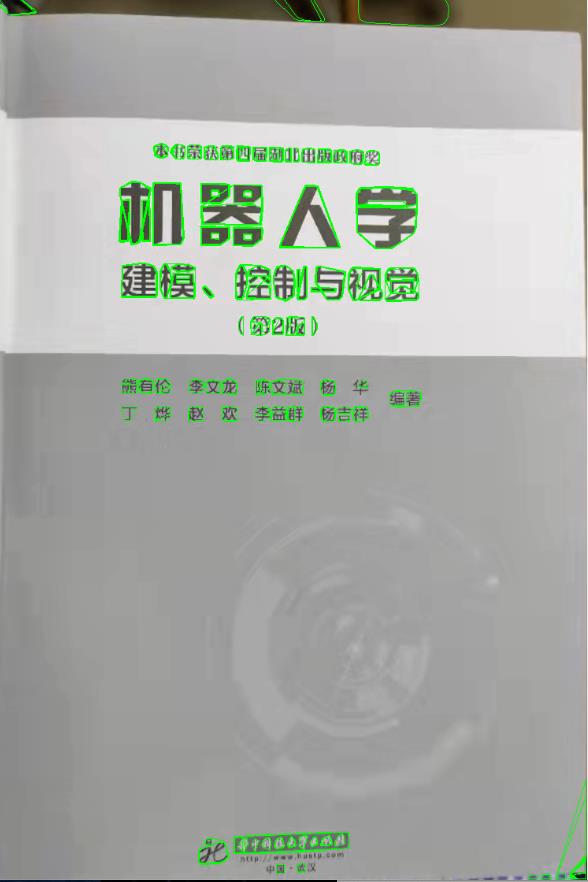
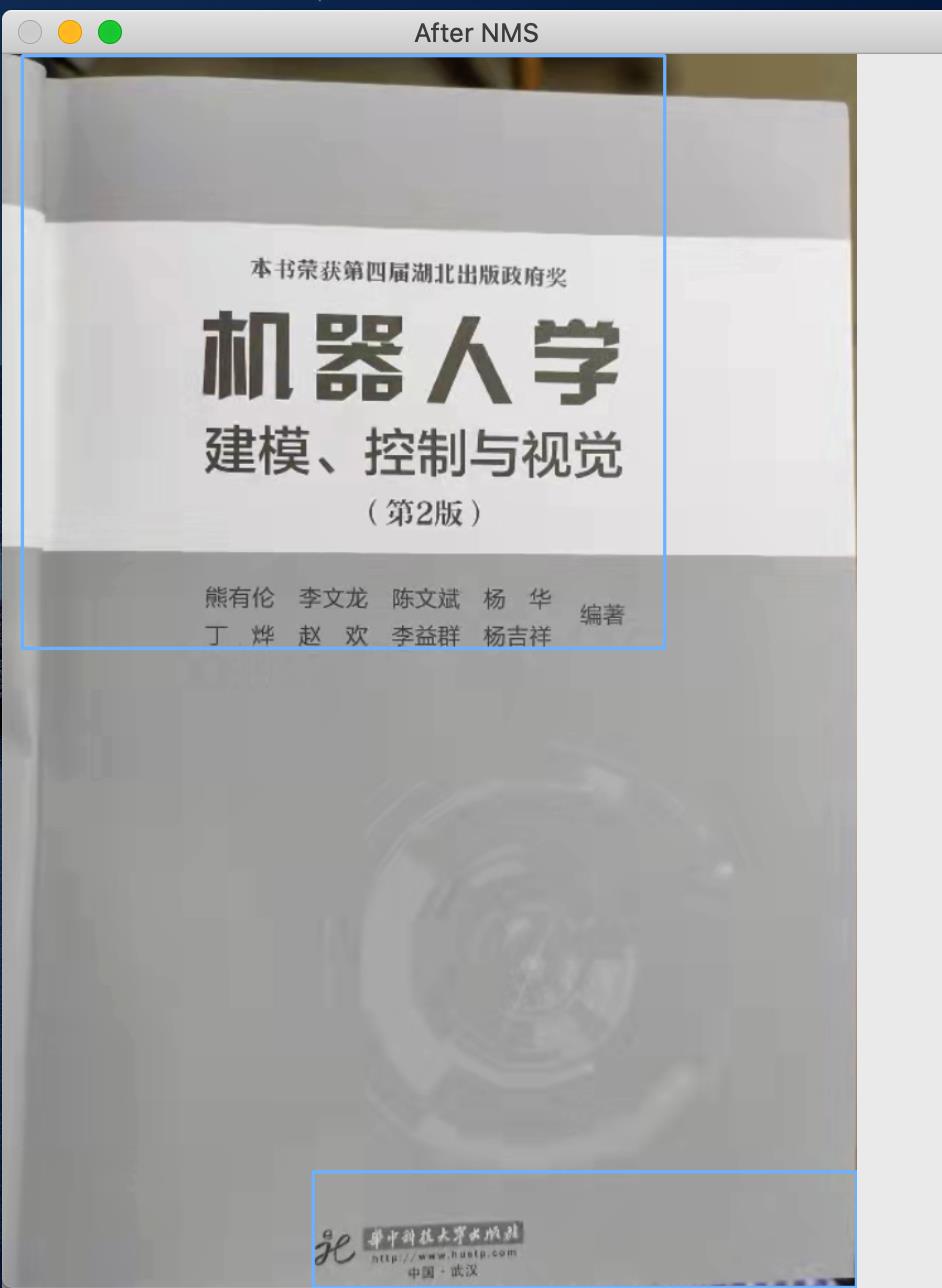
问题:如何使用传统的图像处理方法将相邻的轮廓聚类,同时轮廓变成规则矩形,大的矩形框里的矩形框消失。
聚类算法:
K-Means算法
k均值聚类算法(k-means clustering algorithm)是一种迭代求解的聚类分析算法,其步骤是,预将数据分为K组,则随机选取K个对象作为初始的聚类中心,然后计算每个对象与各个种子聚类中心之间的距离,把每个对象分配给距离它最近的聚类中心。聚类中心以及分配给它们的对象就代表一个聚类。每分配一个样本,聚类的聚类中心会根据聚类中现有的对象被重新计算。这个过程将不断重复直到满足某个终止条件。终止条件可以是没有(或最小数目)对象被重新分配给不同的聚类,没有(或最小数目)聚类中心再发生变化,误差平方和局部最小。
DBSCN算法
将具有足够密度区域作为距离中心,不断生长该区域,算法基于一个事实:一个聚类可以由其中的任何核心对象唯一确定。该算法利用基于密度的聚类的概念,即要求聚类空间中的一定区域内所包含对象的数目不小于某一给定阈值。该方法能在具有噪声的空间数据库中发现任意形状的簇,可将密度足够大的相邻区域连接,能有效处理异常数据,主要用于对空间数据的聚类。
聚类的方法一般有划分法,层次法,基于密度的方法,基于网格的方法,基于模型的方法。 密度聚类:只要临近区域的密度、对象、或者数据点的数目超过某个阈值,就继续聚类,可以根据与周围特点进行聚类,kmeans和分层聚类都是基于距离进行聚类。
import numpy as np
import cv2
import math
import random
def non_max_suppression_fast(boxes, overlapThresh):
"""将矩形框中的矩形框去掉"""
# 空数组检测
if len(boxes) == 0:
return []
# 将类型转为float
if boxes.dtype.kind == "i":
boxes = boxes.astype("float")
pick = []
# 四个坐标数组
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
area = (x2 - x1 + 1) * (y2 - y1 + 1) # 计算面积数组
idxs = np.argsort(y2) # 返回的是右下角坐标从小到大的索引值
# 开始遍历删除重复的框
while len(idxs) > 0:
# 将最右下方的框放入pick数组
last = len(idxs) - 1
i = idxs[last]
pick.append(i)
# 找到剩下的其余框中最大的坐标x1y1,和最小的坐标x2y2,
xx1 = np.maximum(x1[i], x1[idxs[:last]])
yy1 = np.maximum(y1[i], y1[idxs[:last]])
xx2 = np.minimum(x2[i], x2[idxs[:last]])
yy2 = np.minimum(y2[i], y2[idxs[:last]])
# 计算重叠面积占对应框的比例
w = np.maximum(0, xx2 - xx1 + 1)
h = np.maximum(0, yy2 - yy1 + 1)
overlap = (w * h) / area[idxs[:last]]
# 如果占比大于阈值,则删除
idxs = np.delete(idxs, np.concatenate(([last], np.where(overlap > overlapThresh)[0])))
return boxes[pick].astype("int")
"""DBSCAN算法的核心是“延伸”。先找到一个未访问的点p,若该点是核心点,则创建一个新的簇C,
将其邻域中的点放入该簇,并遍历其邻域中的点,若其邻域中有点q为核心点,则将q的邻域内的点也划入簇C,
直到C不再扩展。直到最后所有的点都标记为已访问。"""
"""
DBSCAN算法实现
1、标记点是否被访问:我设置了两个列表,一个存放未访问的点unvisited,一个存放已访问的点visited。每次访问一个点,unvisited列表remove该点,visited列表append该点,以此来实现点的标记改变。
2、C作为输出结果,初始时是一个长度为所有点的个数的值全为-1的列表。之后修改点对应的索引的值来设置点属于哪个簇"""
def dist(t1, t2):
# 计算两个点之间的欧式距离,参数为两个元组
dis = math.sqrt((np.power((t1[0]-t2[0]),2) + np.power((t1[1]-t2[1]),2)))
return dis
def dbscan(spot_pos_list, Eps):
# DBSCAN算法,spot_pos_list为矩形框的中心,Eps为指定半径参数(这里设置为图书馆章的大小)
# we want to return the new_pick which contain x,y,w,h
# we are getting the new spot_pos_list sorted by the distance of spot
new_pick = []
for (startX, startY, endX, endY) in spot_pos_list:
if len(new_pick) == 0:
new_pick.append([startX, startY, endX, endY])
else:
flag = 0
print(new_pick)
for index in range(len(new_pick)):
# 表示属于一个聚类,就更新这个聚类的x,y,w,h
# 如果两个轮廓重叠,则被认定一个聚类
# if abs(startY - new_pick[index][1]) < new_pick[index][3]+endY and abs(startX-new_pick[index][0]) < new_pick[index][2]+endX:
# x = (startX+new_pick[index][0])/2
# y = (startY+new_pick[index][1])/2
# w = (endX+new_pick[index][2]+abs(startY - new_pick[index][1]))
# h = (endY+new_pick[index][3]+abs(startX-new_pick[index][0]))
# new_pick[0] = [x, y, w, h]
# print('hello')
# break
# 如果两个轮廓的距离小于阈值则被认为是同一个聚类
x1 = (startX + endX)/2
y1 = (startY + endY)/2
x2 = (new_pick[index][0] + new_pick[index][2])/2
y2 = (new_pick[index][1] + new_pick[index][3])/2
dis = dist([x1, y1],[x2, y2])
if dis <= Eps:
x = min(startX, new_pick[index][0])
y = min(startY, new_pick[index][1])
w = max(endX, new_pick[index][2])
h = max(endY, new_pick[index][3])
new_pick[index] = [x, y, w, h]
print('shit')
flag = 1
# 表示不是一个聚类
else:
pass
if flag == 0:
new_pick.append([startX, startY, endX, endY])
return new_pick
def get_word_area(img_path):
"""得到检测图像中的文本区域,画出轮廓"""
mser = cv2.MSER_create()
img = cv2.imread(img_path)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
vis = img.copy()
regions, _ = mser.detectRegions(gray)
hulls = [cv2.convexHull(p.reshape(-1, 1, 2)) for p in regions]
'''NMS是经常伴随图像区域检测的算法,作用是去除重复的区域,
在人脸识别、物体检测等领域都经常使用,全称是非极大值抑制(non maximum suppression),
就是抑制不是极大值的元素,所以用在这里就是抑制不是最大框的框,也就是去除大框中包含的小框'''
# 绘制目前的矩形文本框
mser = cv2.MSER_create()
cv2.polylines(vis, hulls, 1, (0, 255, 0))
keep = []
for c in hulls:
x, y, w, h = cv2.boundingRect(c)
keep.append([x, y, x + w, y + h])
cv2.rectangle(vis, (x, y), (x + w, y + h), (255, 255, 0), 1)
# showing the pic before the remove the small box
# cv2.namedWindow("before NMS", 0)
# cv2.resizeWindow("before NMS", 800, 640)
# cv2.imshow("After NMS", vis)
print("[x] %d initial bounding boxes" % (len(keep)))
# 筛选不重复的矩形框
# we are getting the information of rectangle which contain the x,y,w,h
keep2 = np.array(keep)
pick = non_max_suppression_fast(keep2, 0.5)
# 将相邻的矩形框聚类
# 将相邻的矩形框聚类,we are getting the new_pick which contain (startX, startY, endX, endY)
print("after applying non-maximum, %d bounding boxes" % (len(pick)))
orig = img.copy()
new_pick = dbscan(pick, 500)
for (startX, startY, endX, endY) in new_pick:
print(startX, startY, endX, endY)
cv2.rectangle(orig, (startX, startY), (endX, endY), (255, 185, 120), 2)
cv2.namedWindow("After NMS", 0)
cv2.resizeWindow("After NMS", 800, 640)
cv2.imshow("After NMS", orig)
cv2.imwrite('afterNMS.jpg', orig)
if cv2.waitKey(0) == 9:
cv2.destroyAllWindows()
return vis
if __name__ == '__main__':
img_path = './sample3.png'
vis = get_word_area(img_path)
以上是关于kmeans和Dbscans将相邻的轮廓聚类的主要内容,如果未能解决你的问题,请参考以下文章