通过实例分析来认识一下QP状态机
Posted 嵌入式大杂烩
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了通过实例分析来认识一下QP状态机相关的知识,希望对你有一定的参考价值。
关注「嵌入式大杂烩」,选择「星标公众号」一起进步!

来源:技术让梦想更伟大
作者:李肖遥
Blinky是自带的一个很简单的例子,也就是我们俗称的”Hello World!”,可以帮助我们了解QP。在这个blinky中,是以1HZ的速率闪烁LED灯,0.5s开灯,05s关灯。
关于Blinky工程
先来认识QM这个软件,我更改了模式,看起来还不错,
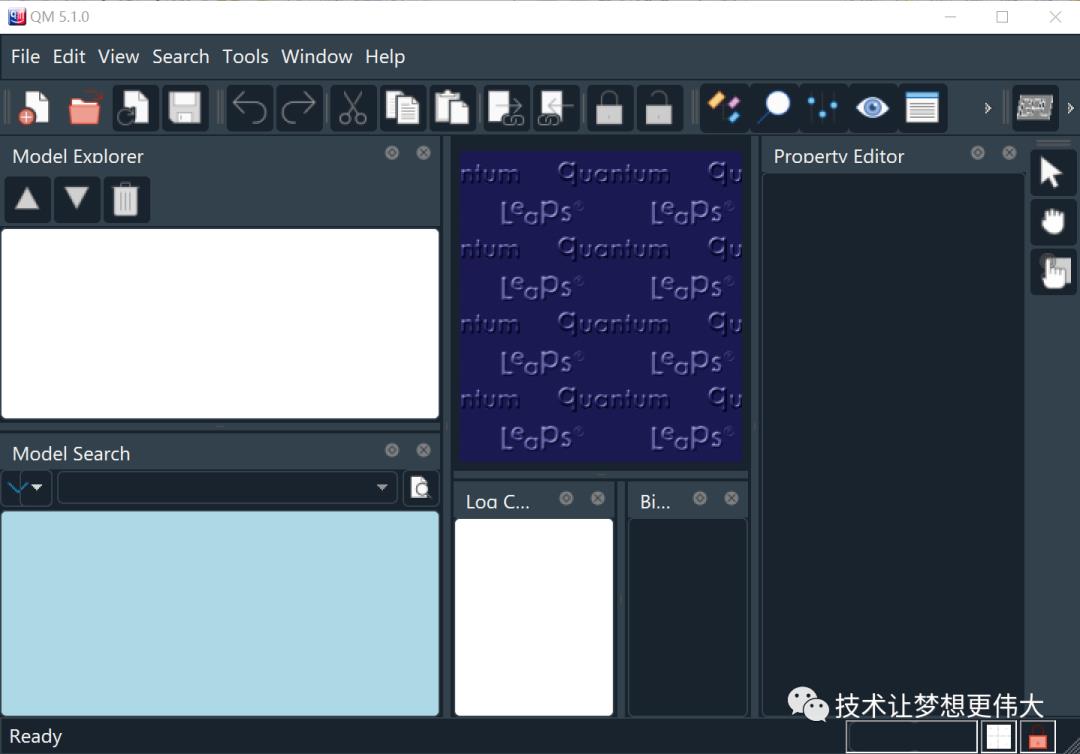
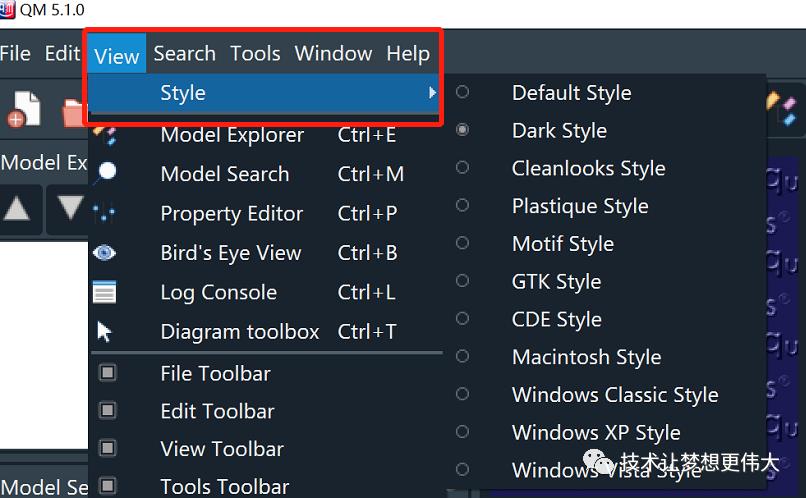
这个模式在view里可以设置
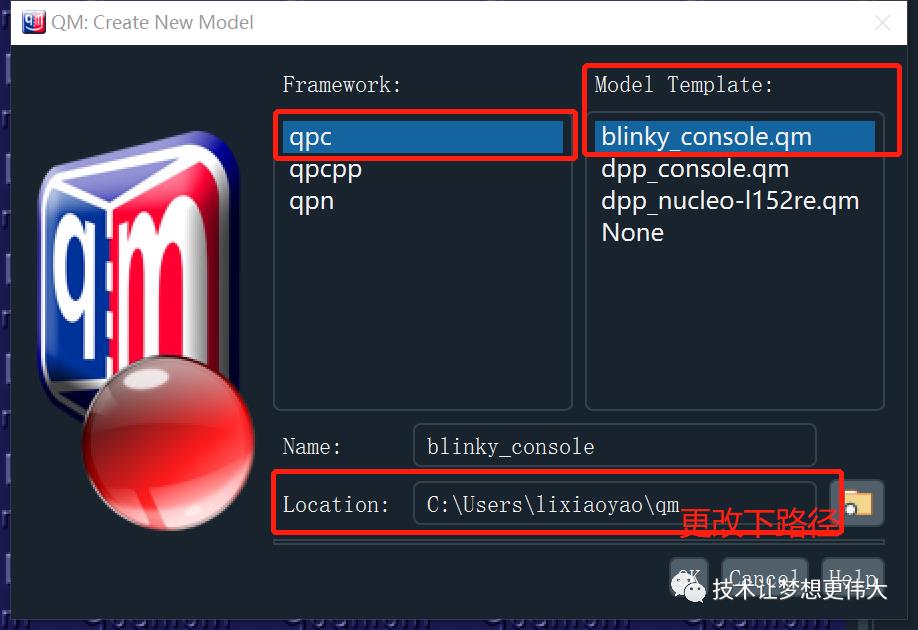
然后,新建一个QM工程
工程打开之后,我们看看工程目录,
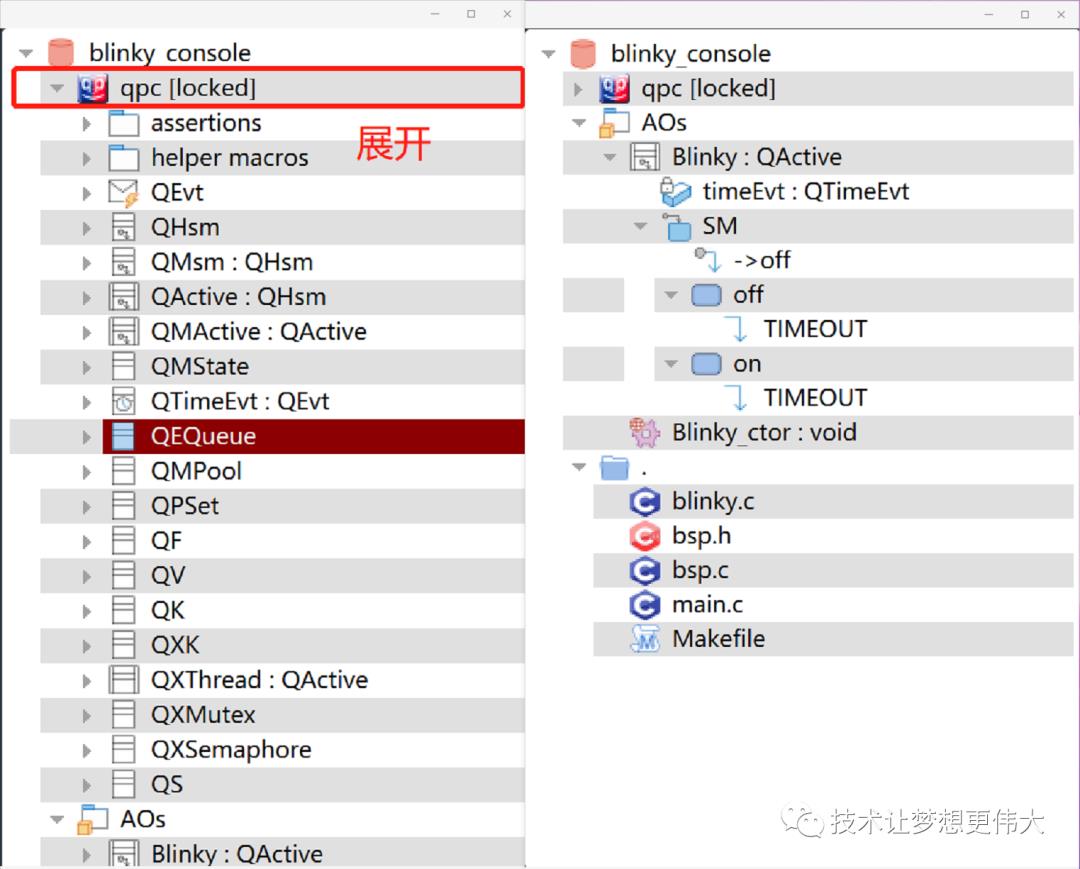
工程当中有很多的快捷键,很方便,这里如果大家有兴趣可以自己熟练一下,接下来看看具体的代码以及功能。
实现的功能
在这个blinky应用中,只有一个名为Blinky的活动对象,这个小巧的对象只应用了最基本的QP功能,先看看main函数。
int main() {
static QEvt const *blinky_queueSto[10]; /*Blinky的事件队列缓冲区
*/
QF_init(); /*初始化框架*/
BSP_init(); /*初始化BSP*/
/*实例化并启动Blinky活动对象*/
Blinky_ctor(); /*显式调用Blinky构造函数 */
QACTIVE_START(AO_Blinky,
1U, /*优先级 */
blinky_queueSto, /*事件队列缓冲区*/
Q_DIM(blinky_queueSto), /*缓冲区的长度*/
(void *)0, 0U, /*私有堆栈(未使用)*/
(QEvt *)0); /*初始化事件(未使用)*/
/*让框架运行应用程序*/
return QF_run();
}在这个demo中,初始化QP框架和bsp包,而且只定义一个简单的Blinky对象,为Blinky 对象写了状态机,然后开始运行这个对象。
状态机
双击Blinky :QActive , 这个Blinky AO的状态机如下图所示:
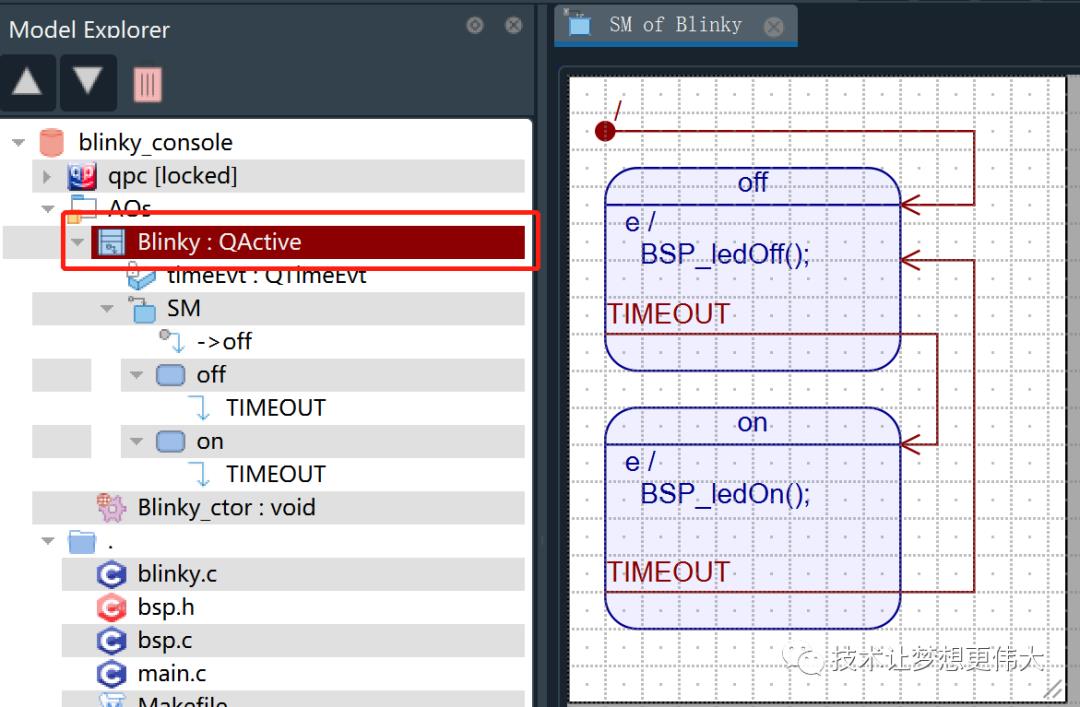
在这个状态机最顶端的initial transtion设定了一个QP event()中的QTimeEvt_armX())在每隔半秒钟投递一次超时信号。
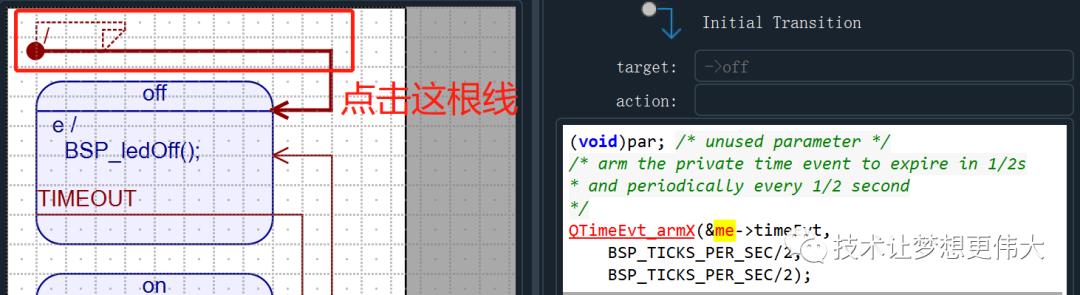
QTimeEvt_armX函数原型如下,准备一个时间事件(一次射击或定期一次)以直接发布事件。
void QTimeEvt_armX ( QTimeEvt *const me,
QTimeEvtCtr const nTicks,
QTimeEvtCtr const interval
)
//Definition at line 297 of file qf_time.c.点击下面的off,initial transtion导致状态“off”,并在entry中执行关闭LED的操作。
void BSP_ledOff(void)
{
printf("LED OFF\\n");
}当TIMEOUT 事件抵达“off”状态的时候,“off”状态将会迁移到“on”状态。
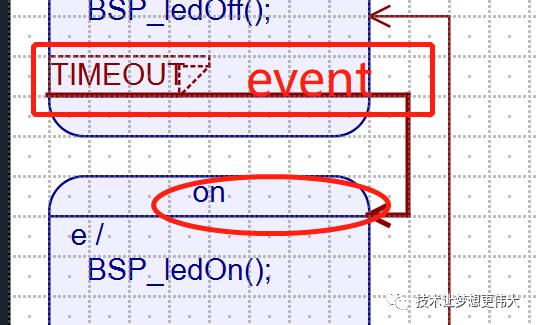
“on”状态里的entry 动作将会关闭LED。
void BSP_ledOn(void)
{
printf("LED ON\\n");
}最后,当“on”状态接收到TIMEOUT 事件,“on”状态会跳转到“off”状态,“off”状态的entry 动作将会被执行关闭LED操作。
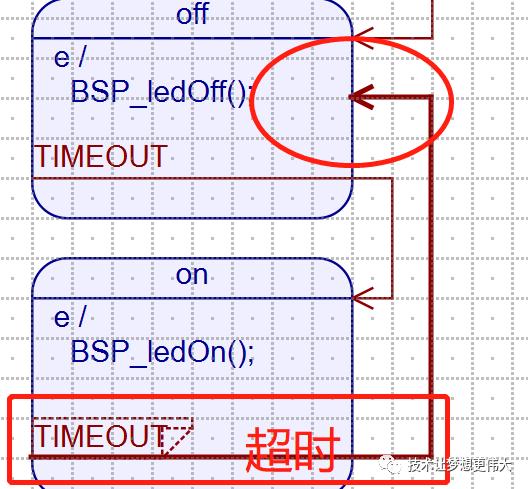
到此,以上的循环将会一直重复,整个状态一直在运转了。
看看状态机的代码
不知道大家看到上面解释中的代码有没有疑惑,BSP_ledOn()函数啥都没有啊,难道不应该控制某个gpio口来控制led灯的状态吗?
这里是专门被设计成了不需要直接访问目标资源,不写入特定的嵌入式主板的GPIO,而是访问调用封装好的BSP,这样就不需要改变它的状态机代码了。
对于不同的硬件平台,状态机实现代码(blinky.c)是一样的,只需要更改bsp包就行
工程中blinky.c源码如下:
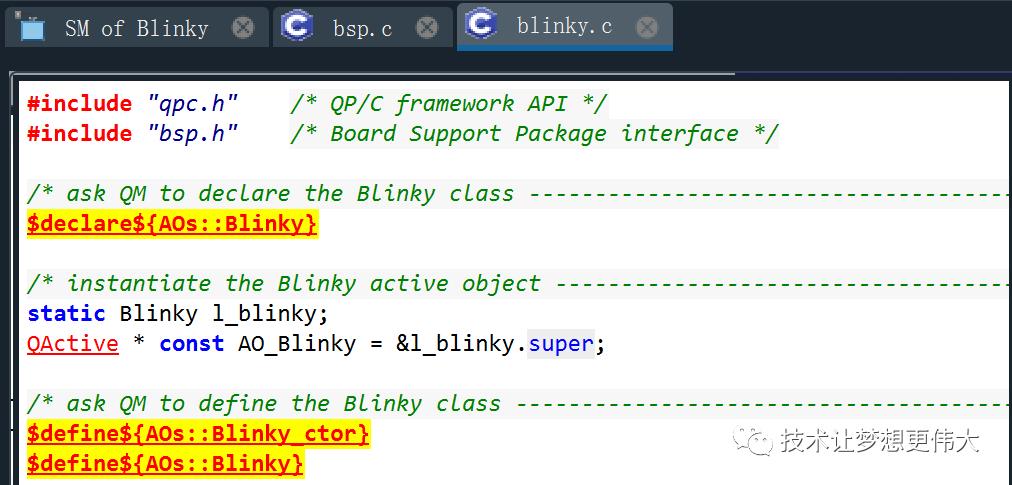
我们来看看主要的代码:
void Blinky_ctor(void) {
Blinky *me = (Blinky *)AO_Blinky;
QActive_ctor(&me->super, Q_STATE_CAST(&Blinky_initial));
QTimeEvt_ctorX(&me->timeEvt, &me->super, TIMEOUT_SIG, 0U);
}static QState Blinky_initial(Blinky * const me, void const * const par) {
(void)par;
/*0.5s的定时*/
QTimeEvt_armX(&me->timeEvt,
BSP_TICKS_PER_SEC/2,
BSP_TICKS_PER_SEC/2);
return Q_TRAN(&Blinky_off);
}static QState Blinky_off(Blinky * const me, QEvt const * const e) {
QState status_;
switch (e->sig) {
/*状态是off} */
case Q_ENTRY_SIG: {
BSP_ledOff();
status_ = Q_HANDLED();//告知框架已经处理事件,没有别的什么动作
break;
}
/*超时信号 */
case TIMEOUT_SIG: {
status_ = Q_TRAN(&Blinky_on);
break;
}
default: {
status_ = Q_SUPER(&QHsm_top);
break;
}
}
return status_;
}static QState Blinky_on(Blinky * const me, QEvt const * const e) {
QState status_;
switch (e->sig) {
/*状态是on*/
case Q_ENTRY_SIG: {
BSP_ledOn();
status_ = Q_HANDLED();//告知框架已经处理事件,没有别的什么动作
break;
}
/*超时状态*/
case TIMEOUT_SIG: {
status_ = Q_TRAN(&Blinky_off);
break;
}
default: {
status_ = Q_SUPER(&QHsm_top);
break;
}
}
return status_;
}最后是运行的结果,因为我没有板子,所以就没有最终的展示结果了,其实就是闪个灯,后续再继续深入吧。
总结
一个简单的例子就介绍到这里,实际上我感觉还缺少对这个框架的理解,比如为什么不控制gpio就可以控制led,还有状态机的运行机制是什么样的,这里我们主要是实操,用一个简单的例子来点个灯入门一下。
最后,QP感觉是一个很深的知识,我看了很久的书,有些理解,但是无法下手写文章表达出来,所以一直耽误,如果有理解不到位的或者错误的地方,请大家多多谅解。
往期推荐:
往期推荐
以上是关于通过实例分析来认识一下QP状态机的主要内容,如果未能解决你的问题,请参考以下文章