机器学习笔记:高斯过程
Posted UQI-LIUWJ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器学习笔记:高斯过程相关的知识,希望对你有一定的参考价值。
1 高斯分布回顾
一维高斯分布
当维度上升到多维的时候(比如有限的p维),我们称之为高维高斯分布,记作:
其中 μ是p维向量,表示每个维度的均值,Σ的第(i,j)项表示第i个维度和第j个维度之间的协方差
2 高斯过程
高斯过程可以看成是定义在连续域上的无限维高斯分布
用符号表示,有:
2.1 高斯过程举例
以下图为例,假设横轴表示时间,纵轴表示体能值。
假设对于某一个物种而言,在任何时刻,体能值都满足正态分布(只不过不同的时间点,分布的均值和方差可能不同)
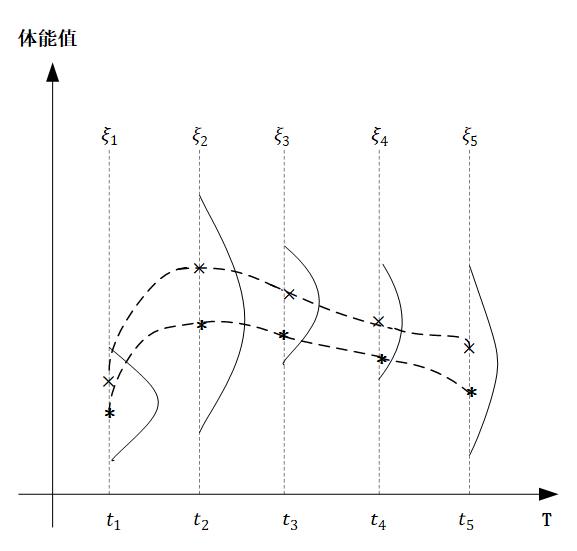
我们在图中选取了5个点 ,
, 对应5个时刻的体能值,分别满足高斯分布
对应5个时刻的体能值,分别满足高斯分布
不失一般性,我们有:任取一个时刻t,
而图中的两条虚线是两个高斯过程的样本。也即我们取遍所有时刻的t,获得的 连成的一条虚线
连成的一条虚线
2.2 形式化语言描述高斯过程
我们和p维的高斯分布进行类比:
| p维高斯分布 | 高斯过程(无限维高斯分布) | |
| 均值 |  | 关于时刻t的函数,m(t) |
| 方差 |  | 核函数(协方差函数)k(s,t),其中s和t分别代表任意两个时刻 |
| 表示 |  |  |
2.3 径向基函数(RBF)
这是一种较为常见的核函数
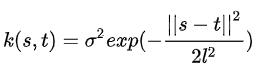
- 这里的σ和l是径向基函数的超参数,是可以提前设置好的
- s和t表示高斯过程连续域上的两个不同的时间点,两个点距离越大,两个分布之间的协方差值越小,相关性越小
2.3.1RBF代码
import numpy as np
def rbf(x):
sigma=1
l=1
#设置两个rbf的超参数
m=x.shape[0]
k=np.zeros((m,m))
#初始化这个数据的径向基矩阵
for i in range(m):
for j in range(m):
k[i][j]=np.exp(-np.sum((x[i]-x[j])**2)/2)
#这里为什么要sum呢?因为我某一个时刻,特征可能不止一个维度(就像这里我们每个时刻是两个维度)
return(k)
a=np.array([[1,2],
[3,4],
[5,6]])
#三个时刻的数据,每个时刻有两维特征
rbf(a)
'''
array([[1.00000000e+00, 1.83156389e-02, 1.12535175e-07],
[1.83156389e-02, 1.00000000e+00, 1.83156389e-02],
[1.12535175e-07, 1.83156389e-02, 1.00000000e+00]])
'''
#这相当于一个3*3的协方差矩阵3 高斯过程回归
这个过程可以看成先验概率+观测值——>后验概率的过程
先验概率:通过μ(t)和k(s,t)定义一个高斯过程
3.1 高维高斯分布的条件概率
高斯分布的联合概率,边缘概率和条件概率都仍然满足高斯分布
假设n维随机变量满足:
如果我们把这n维的随机变量分成两部分:p维的xa和q维的xb,(q+p=n),那么我们有:
其中 ,
,
同时,条件概率也是高维高斯分布
3.2 类比到高斯过程回归
我们将均值向量换成均值函数,把协方差矩阵换成核函数,把高维高斯分布看成高斯过程(无限维高斯分布)
假设我们有观测值(X,Y),于是我们记其他的非观测点是
首先,联合分布是满足无限维高斯分布的

与此同时,条件概率
也满足无限维高斯分布(高斯过程)
类比前面的
,我们现在有:

3.3高斯过程实例
下面我们来实际的进行代码演示
令:
【注:这里的μ(X)是Y的分布的均值,不是X的分布均值
】
中的
取四个观测值 X=[1,3,7,9] ,Y为


我们在四个观测点的基础上,来求高斯过程的后验。
在下面的具体程序实现中,由于绘图是离散化处理的,因此连续域上的均值函数以及核函数,我们使用一个 很大的 n 维均值向量以及n×n 协方差矩阵进行表示
3.3.1 代码部分
import numpy as np
import matplotlib.pyplot as plt
def rbf(x,y,l=0.5,simga=0.2):
sigma=1
l=1
#设置两个rbf的超参数
m=x.shape[0]
n=y.shape[0]
k=np.zeros((m,n), dtype=float)
#初始化这个数据的径向基矩阵
for i in range(m):
for j in range(n):
k[i][j]=np.exp(-np.sum((x[i]-y[j])**2)/(2*l**2))*simga**2
#这里为什么要sum呢?因为我某一个时刻,特征可能不止一个维度(就像这里我们每个时刻是两个维度)
return(k)
def getY(x):
#生成观测值对应的Y
Y=np.sin(x)*0.4+np.random.normal(0,0.05,size=x.shape)
return(Y)
def guassian_process(X,X_star):
K_XX=rbf(X,X)#f(X,X)
K_XX_=rbf(X,X_star)#f(X,X*)
K_X_X=rbf(X_star,X)#f(X*,X)
K_X_X_=rbf(X_star,X_star)#f(X*,X*)
K_XX_inv=np.linalg.inv(K_XX+ 1e-8 * np.eye(len(X)))
#f(X,X)的逆,加后一项是为了防止不可逆
mu_star=K_X_X.dot(K_XX_inv).dot(Y-0)+0
#μ* 后面的μ(X*)也是0,是因为整体的μ(X)是0,去掉那几个点之后的μ(X*)也是0
cov_star=K_X_X_-K_X_X.dot(K_XX_inv).dot(K_XX_)
#Σ*
return(mu_star,cov_star)
#根据观察点X,修正生成高斯过程新的均值和协方差
f,ax=plt.subplots(2, 1,
figsize=(10,10),
sharex=True,
sharey=True)
#绘制高斯过程的先验 (μ(x)=0)
X_pre = np.arange(0, 10, 0.1)
Y_pre = np.array([0]*len(X_pre))
conv_pre=rbf(X_pre,X_pre)
uncertainty=1.96*np.sqrt(np.diag(conv_pre))
#1.96是高斯分布的95%置信区间,这里表示每个点对应的95%置信区间
ax[0].fill_between(
X_pre,
Y_pre+uncertainty,
Y_pre-uncertainty,
alpha=0.2)
ax[0].plot(X_pre,Y_pre,label="pre_expectation")
ax[0].legend()
#ax[0]绘制的是完全没有任何观测点的时候的先验概率分布,我们只知道μ(X)=0
X=np.array([1,3,7,9])
Y=getY(X)
#我们观测到了这四个点,其他的点μ(x)依旧为0
X_star=np.arange(0,10,0.1)
Y_star,conv_star=guassian_process(X,X_star)#得到 f(x*)|Y的均值和方差
uncertainty_star=1.96*np.sqrt(np.diag(conv_star))
ax[1].fill_between(
X_star,
Y_star+uncertainty_star,
Y_star-uncertainty_star,
alpha=0.2)
ax[1].plot(X_star,Y_star,label="after_expectation")
ax[1].scatter(X,Y,c='green')
ax[1].legend()
#ax[1]绘制的是有四个观测点之后的后验概率分布3.3.2 结论部分
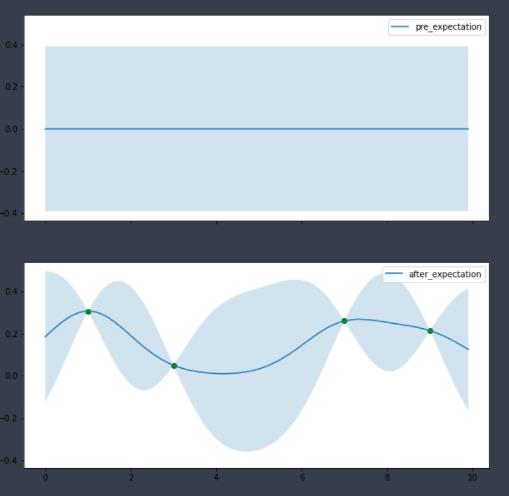
ax[0]绘制的是完全没有任何观测点的时候的先验概率分布,我们只知道μ(X)=0;ax[1]绘制的是有四个观测点之后的后验概率分布。
明显可以看出,由于观测点信息的带入,连续域上各个点的均值发生了变化。同时大部分取值点的 置信空间也收窄,证明确定性得到了增强。
参考内容:如何通俗易懂地介绍 Gaussian Process? - 知乎 (zhihu.com)
4 sklearn
以上是关于机器学习笔记:高斯过程的主要内容,如果未能解决你的问题,请参考以下文章