PCL:基于颜色的区域生长分割
Posted 没事就要敲代码
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PCL:基于颜色的区域生长分割相关的知识,希望对你有一定的参考价值。
1 原理
基于颜色的区域生长分割的基本思想与 基于颜色的区域生长分割 相同。
基于颜色的算法有两个主要区别:
- 第一个是它使用颜色而不是法线。
- 第二种是使用合并算法进行过分割和欠分割控制,分割后,尝试合并具有相近颜色的簇。两个相邻簇的平均颜色相差很小,它们合并在一起。然后进行第二个合并步骤。在这一步中,每个集群都会根据其包含的点数进行验证。如果此数字小于用户定义的值,则当前群集将与最近的相邻群集合并。
2 代码实现
代码:
#include <pcl/io/pcd_io.h>
#include <pcl/search/search.h>
#include <pcl/search/kdtree.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/segmentation/region_growing_rgb.h>
#include <pcl/console/time.h>
using namespace std;
int main()
{
//------------------------------- 加载点云 -------------------------------
cout << "->正在加载点云..." << endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud <pcl::PointXYZRGB>);
if (pcl::io::loadPCDFile<pcl::PointXYZRGB>("road.pcd", *cloud) < 0)
{
PCL_ERROR("\\a点云文件不存在!\\n");
system("pause");
return (-1);
}
cout << "->加载点的个数:" << cloud->points.size() << endl;
//========================================================================
//--------------------------- 基于颜色的区域生长 ---------------------------
pcl::console::TicToc time;
time.tic();
cout << "->正在进行基于颜色的区域生长..." << endl;
pcl::search::Search <pcl::PointXYZRGB>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZRGB>);
pcl::RegionGrowingRGB<pcl::PointXYZRGB> rgr; //创建生长对象
rgr.setInputCloud(cloud); //设置输入点云
rgr.setSearchMethod(tree); //设置搜索方法
rgr.setDistanceThreshold(0.2); //设置距离阈值,用于判断两点是否相邻,小于阈值的为相邻点,用于聚类邻域点搜索
rgr.setPointColorThreshold(20); //设置点之间的颜色阈值,类似于基于曲率的区域生长中的平滑阈值,用于提取同一区域的点
rgr.setRegionColorThreshold(20); //设置聚类之间的颜色阈值,用于聚类合并
rgr.setMinClusterSize(50); //设置满足一个聚类的最小点数,如果聚类点数小于该阈值,则将其与最近的一个聚类合并
rgr.setMaxClusterSize(99999999); //设置满足一个聚类的最大点数
std::vector <pcl::PointIndices> clusters; //聚类索引向量
rgr.extract(clusters); //获取聚类结果,并保存到索引向量中
cout << "->聚类个数为" << clusters.size() << endl;
cout << "->区域生长用时:" << time.toc() / 1000 << " s" << endl;
//========================================================================
//----------------------------- 可视化生长结果 -----------------------------
pcl::PointCloud <pcl::PointXYZRGB>::Ptr colored_cloud = rgr.getColoredCloud(); //对不同的分类结果随机赋色
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("基于颜色的区域生长分割结果"));
viewer->addPointCloud<pcl::PointXYZRGB>(colored_cloud, "colored_cloud");
//viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "colored_cloud");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
//========================================================================
return (0);
}
输出结果:
->正在加载点云...
->加载点的个数:200293
->正在进行基于颜色的区域生长...
->聚类个数为141
->区域生长用时:215.995 s
3 结果展示
实验点云点数为 200293,点间距为 5cm,实验结果如下:
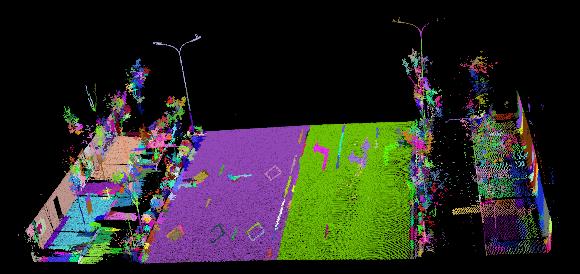 | 两个颜色阈值均为5,聚类个数为675,耗时 775.568 s |
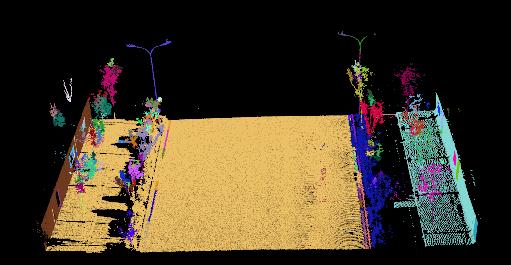 | 两个颜色阈值均为20,聚类个数为141,耗时 215.995 s |
4 注意
点
P
1
P_1
P1 与点
P
2
P_2
P2 之间的颜色距离(Color Distance)定义为:
C
D
(
P
1
,
P
2
)
=
(
R
1
−
R
2
)
2
+
(
G
1
−
G
2
)
2
+
(
B
1
−
B
2
)
2
)
CD(P_1,P_2)=\\sqrt{(R_1-R_2)^2+(G_1-G_2)^2+(B_1-B_2)^2)}
CD(P1,P2)=(R1−R2)2+(G1−G2)2+(B1−B2)2)
式中,
R
1
,
G
1
,
B
1
R_1,G_1,B_1
R1,G1,B1 和
R
2
,
G
2
,
B
2
R_2,G_2,B_2
R2,G2,B2 分别为点
P
1
P_1
P1 与点
P
2
P_2
P2 的RGB值。
颜色阈值设置的越小,分割越精细,耗时越长。
相关链接:
以上是关于PCL:基于颜色的区域生长分割的主要内容,如果未能解决你的问题,请参考以下文章