CS224W摘要08.Applications of Graph Neural Networks
Posted oldmao_2000
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了CS224W摘要08.Applications of Graph Neural Networks相关的知识,希望对你有一定的参考价值。
文章目录
CS224W: Machine Learning with Graphs
公式输入请参考: 在线Latex公式
这节课要讲如何对图做augmentation
之前的讨论都是根据原始的图数据进行计算的,也就是说之前都是根据以下假设进行的:
Raw input graph = computational graph
但是实际上这个假设有很多问题:
- Features:
§ The input graph lacks features - Graph structure:
§ The graph is too sparse →inefficient message passing
§ The graph is too dense →message passing is too costly(某些微博节点关注量上百万,做aggregation计算量太大)
§ The graph is too large →cannot fit the computational graph into a GPU
因此原始数据不一定适用直接进行计算,要对原始的图数据进行增强(处理)。
针对上面的两个方面问题,这节课也从两个方面进行讲解如何做增强。
Graph Feature augmentation
Graph Structure augmentation
§ The graph is too sparse →Add virtual nodes / edges
§ The graph is too dense →Sample neighbors when doing message passing
§ The graph is too large →Sample subgraphs to compute embeddings
Graph Feature augmentation
原因:
1.节点没有feature,只有结构信息(邻接矩阵)
解决方案:
a)Assign constant values to nodes
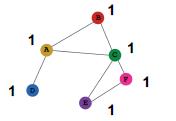
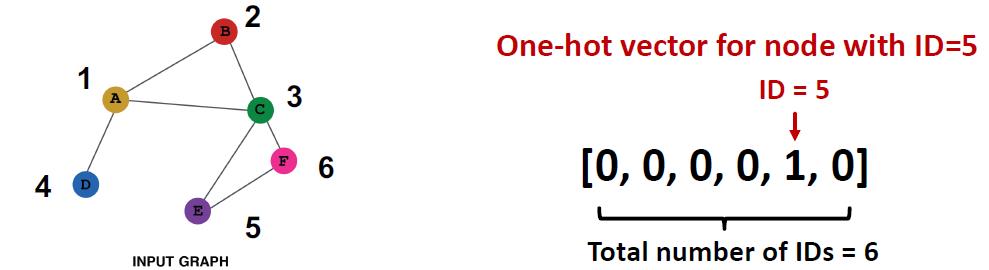
b)Assign unique IDs to nodes,一般使用独热编码
两个方案的对比如下表:
| 方案a | 方案b | |
|---|---|---|
| Expressive power | Medium. All the nodes are identical, but GNN can still learn from the graph structure | High. Each node has a unique ID, so node-specific information can be stored |
| Inductive learning (Generalize to unseen nodes) | High. Simple to generalize to new nodes: we assign constant feature to them, then apply our GNN | Low. Cannot generalize to new nodes: new nodes introduce new IDs, GNN doesn’t know how to embed unseen IDs |
| Computational cost | Low. Only 1 dimensional feature | High. O(V) dimensional feature, cannot apply to large graphs |
| Use cases | Any graph, inductive settings (generalize to new nodes) | Small graph, transductive settings (no new nodes) |
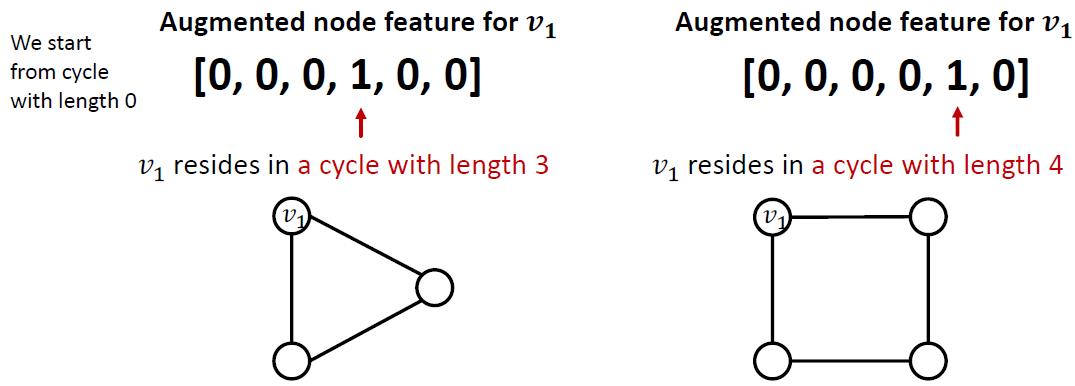
2.有些图结构GNN很难学习到,例如:Cycle count feature
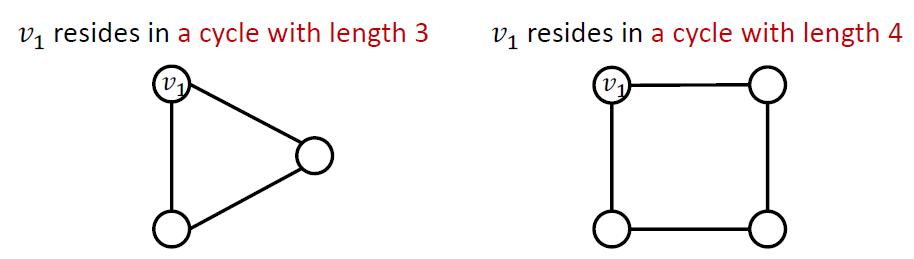
两个图中的
v
1
v_1
v1节点度都为2,以
v
1
v_1
v1节点做出来的计算图都是一样的二叉树
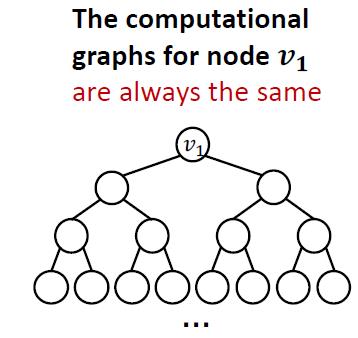
解决方案是把cycle count直接作为特征加到节点信息里面
当然还可以有别的特征可以加进来,例如:
§ Node degree
§ Clustering coefficient
§ PageRank
§ Centrality
Graph Structure augmentation
Augment sparse graphs
Add virtual edges
Connect 2-hop neighbors via virtual edges
该法与计算图的邻接矩阵:
A
+
A
2
A+A^2
A+A2效果一样
例如:Author-to-papers的Bipartite graph中

2-hop virtual edges make an author-author collaboration graph.
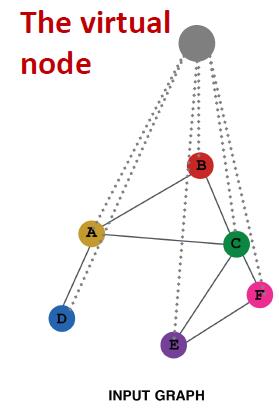
Add virtual nodes
The virtual node will connect to all the nodes in the graph.
§ Suppose in a sparse graph, two nodes have shortest path distance of 10.
§ After adding the virtual node, all the nodes will have a distance of two.
好处:
Greatly improves message passing in sparse graphs.
Augment dense graphs
方法就是对邻居节点进行采样操作。
例如,设置采样窗口大小为2,那么
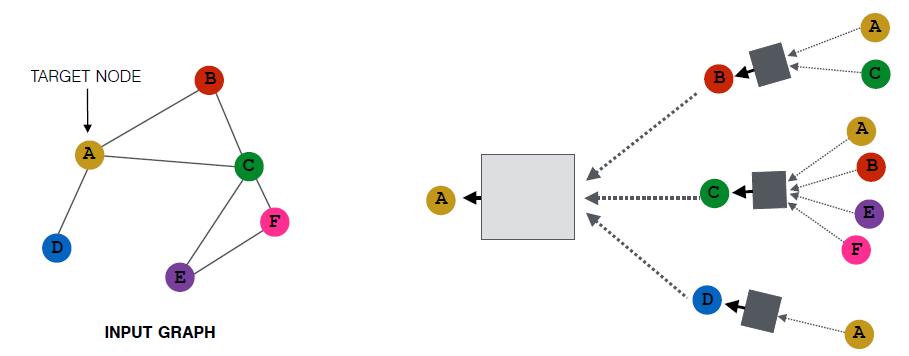
可能变成:
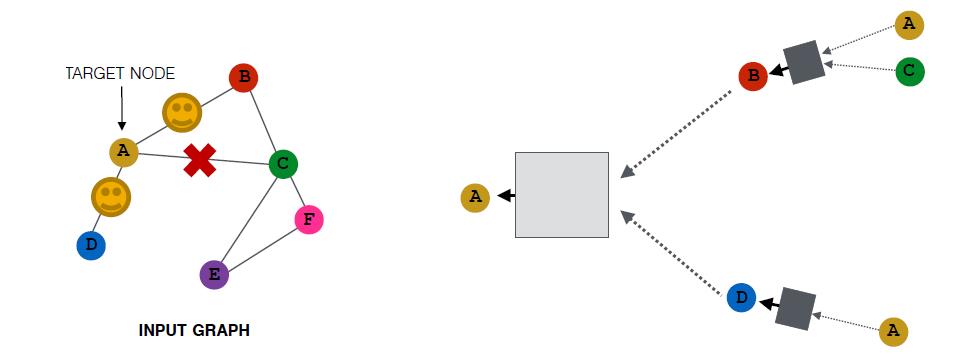
当然,采样是随机的,所有还有可能是:
当然,如果邻居节点个数小于采样窗口大小,汇聚后的embedding会比较相似。
这个做法的好处是大大减少计算量。
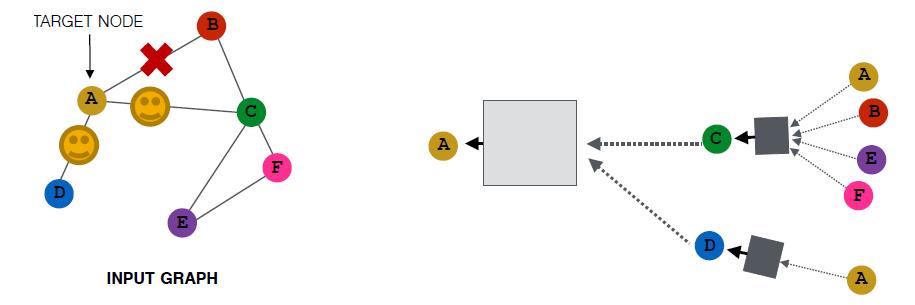
Prediction with GNNs
这个小节讲解GNN框架的预测部分:
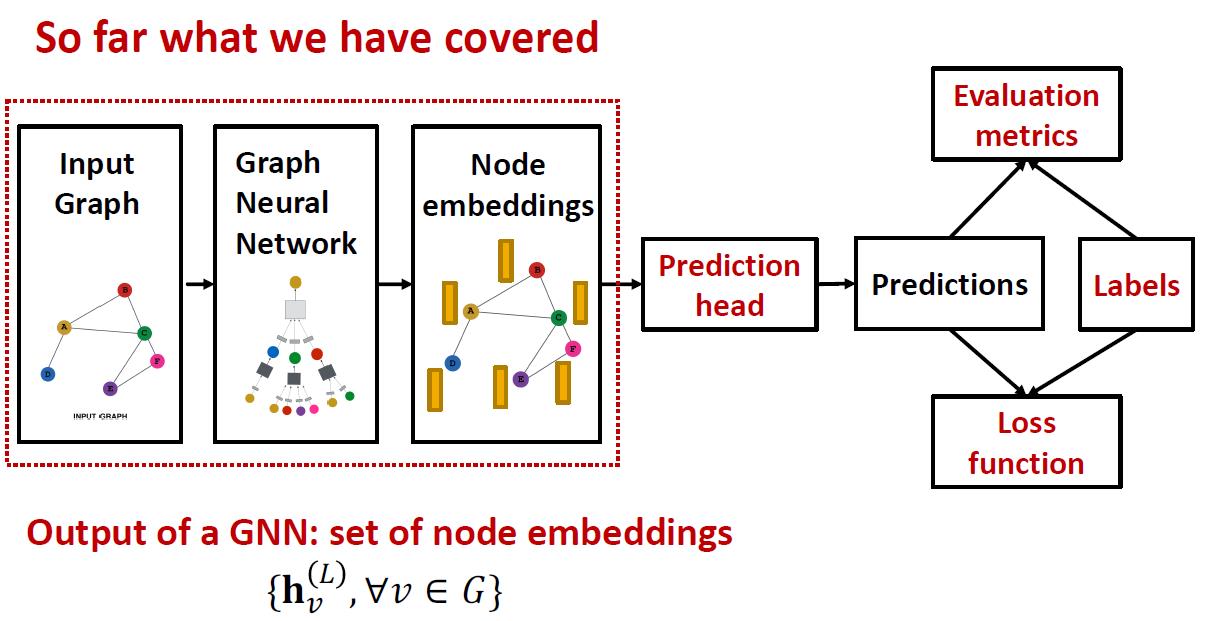
GNN Prediction Heads
Idea: Different task levels require different prediction heads
这里第一次看到用Head来代表函数
Node-level prediction
直接用节点表征进行预测
Suppose we want to make 𝑘-way prediction
§ Classification: classify among 𝑘 categories
§ Regression: regress on 𝑘 targets
y ^ v = H e a d n o d e h v ( L ) = W ( H ) h v ( L ) \\hat y_v=Head_{node}h_v^{(L)}=W^{(H)}h_v^{(L)} y^v=Headnodehv(L)=W(H)hv(L)
Edge-level prediction
用一对节点的表征对边进行预测:
y
^
u
v
=
H
e
a
d
e
d
g
e
(
h
u
(
L
)
,
h
v
(
L
)
)
\\hat y_{uv}=Head_{edge}(h_u^{(L)},h_v^{(L)})
y^uv=Headedge(hu(L),hv(L))
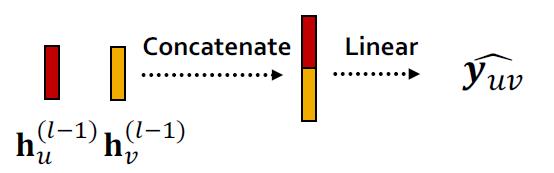
这里的Head有两种做法:
1.Concatenation + Linear
y
^
u
v
=
L
i
n
e
a
r
(
C
o
n
c
a
t
(
h
u
(
L
)
,
h
v
(
L
)
)
)
\\hat y_{uv}=Linear(Concat(h_u^{(L)},h_v^{(L)}))
y^uv=Linear(Concat(hu(L),hv(L)))
这里的Linear操作会将2×d维的concat结果映射为 k-dim embeddings(相当于𝑘-way prediction)
2.Dot product
y
^
u
v
=
(
h
u
(
L
)
)
T
h
v
(
L
)
\\hat y_{uv}=(h_u^{(L)})^Th_v^{(L)}
y^uv=(hu(L))Thv(L)
由于点积后得到的是常量,因此该方法用于𝟏-way prediction,通常是指边是否存在。
如果要把这个方法用在𝒌-way prediction,则可以参考多头注意力机制设置k个可训练的参数:
W
(
1
)
,
W
(
2
)
,
⋯
,
W
(
k
)
W^{(1)},W^{(2)},\\cdots,W^{(k)}
W(1),W(2),⋯,W(k)
y
^
u
v
(
1
)
=
(
h
u
(
L
)
)
T
W
(
1
)
h
v
(
L
)
⋯
y
^
u
v
(
k
)
=
(
h
u
(
L
)
)
T
W
(
k
)
h
v
(
L
)
\\hat y_{uv}^{(1)}=(h_u^{(L)})^TW^{(1)}h_v^{(L)}\\\\ \\cdots\\\\ \\hat y_{uv}^{(k)}=(h_u^{(L)})^TW^{(k)}h_v^{(L)}
y^uv(1)=(hu(L))TW(1)hv(L)⋯y^uv(k)=(hu(L))TW(k)hv(L)
y
^
u
v
=
C
o
n
c
a
t
(
y
u
v
(
1
)
,
⋯
,
y
u
v
(
k
)
)
\\hat y_{uv}=Concat(y_{uv}^{(1)},\\cdots,y_{uv}^{(k)})
y^uv=Concat(yuv(1),⋯,yuv(k))
Graph-level prediction
使用图中所有节点的特征做预测。
y
^
G
=
H
e
a
d
g
r
a
p
h
(
{
h
v
(
L
)
∈
R
d
,
∀
v
∈
G
}
)
\\hat y_G=Head_{graph}(\\{h_v^{(L)}\\in \\R^d,\\forall v\\in G\\})
y^G=Headgraph({hv(L)∈Rd,∀v∈G})
这里的head函数和aggregation操作很像,也是有mean、max、sum操作。
这些常规操作对于小图效果不错,对于大图效果不好,会掉信息。
例子:
we use 1-dim node embeddings
§ Node embeddings for
𝐺
1
:
{
−
1
,
−
2
,
0
,
1
,
2
}
𝐺_1: \\{−1,−2, 0, 1, 2\\}
G