百度AI市场MYNT EYE小觅双目摄像机开箱试用全记录
Posted 百度大脑
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了百度AI市场MYNT EYE小觅双目摄像机开箱试用全记录相关的知识,希望对你有一定的参考价值。
终于收到了小觅双目摄像头深度系列(MYNT EYE Depth),这是一个内置深度计算核心的双目惯导相机,用它来做个开箱跟试用,希望能给大家提供一些参考。
小觅双目摄像头深度版(50°镜头)产品规格型号为:D1000-50/Color。内置深度计算芯片,无需上位机直接输出深度,同时搭载全局快门,并能实现芯片级双目帧同步,可输出720p/60fps深度图像,深度误差最高可达毫米级。同时,内置六轴IMU传感器和IR主动光探测器(120°版本),适用室内外、黑暗等复杂环境,可以为避障、导航、自动驾驶等领域的产品提供视觉SLAM的硬件解决方案,让机器人、无人机、无人车等设备如”人眼”般看世界。
1 开箱
首先,外观上是一个正正方方的黑色盒子,质感还是相当不错的(请忽略我的拍照能力…)
打开盒子,摄像头主体部分十分小巧,下面是USB的连接线

摄像头正面

正面造型有些蠢萌,像个睁着圆溜溜大眼睛的机器人
摄像头正面介绍

摄像头背面

摄像头型号简介 USB数据线

从外包装可以看到摄像头整体被保护的较好,数据线和镜头分开存放。为了防止镜头磨损,存放镜头的格子还专门有两处凹陷处。从包装的小细节中可以感受的到品牌的用心之处。至少打开包装盒以及开箱的那一瞬间,还是有一点被惊讶到的。
产品详细参数
- 分辨率:2560x720; 1280x480
- 深度分辨率:On chip1280x720; 640x480
- 帧率:60FPS
- 支持IR:NO
- 深度工作距离:0.49-10m
- 运行温度:-10°C~55°C
- 储存温度:-15°C~70°C
- 湿度:10% to 80% non-condensing
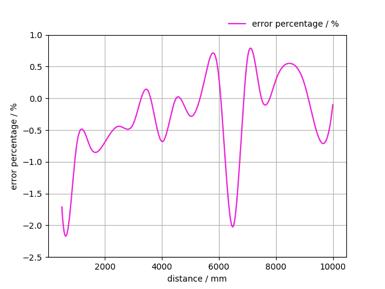
- 深度误差
开发帮助: 开发手册
看完外观跟基本参数,迫不及待赶紧上手实际操作体验一下,下面详细记录一下安装步骤
系统要求:win10 内存:4G及以上 CPU:i5及以上
这款摄像头实际上提供了对多平台、多场景的支持,我们这里以Win10操作系统为例介绍如何使用它采集数据。
2 运行环境搭建
2.1 安装Visual Studio 2017
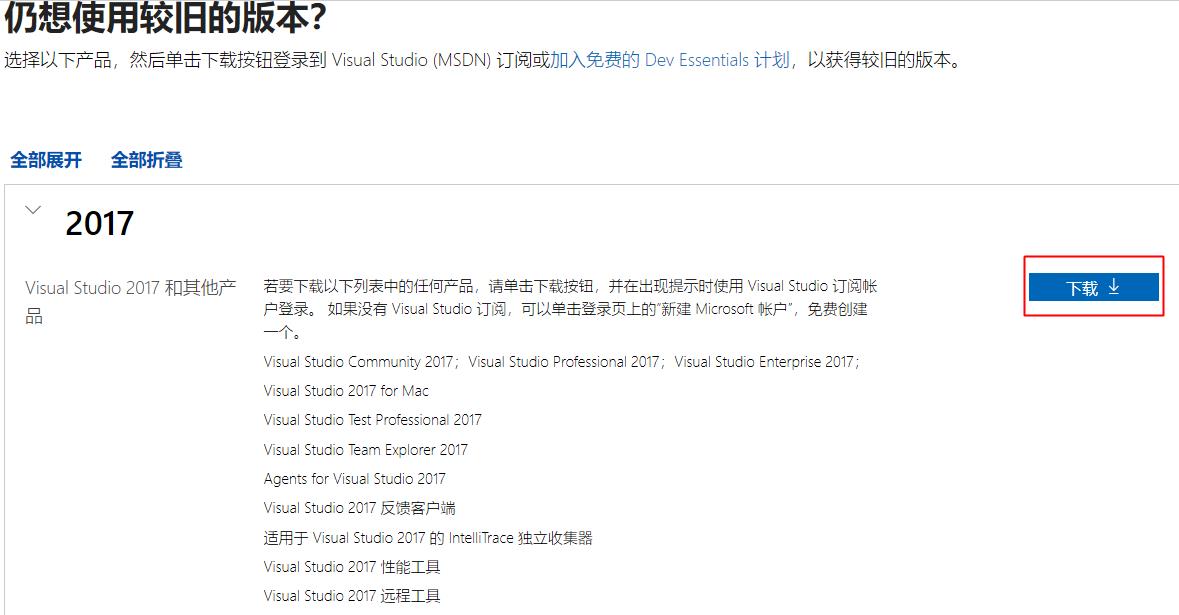
第一步:下载Visual Studio 2017:https://visualstudio.microsoft.com/zh-hans/vs/older-downloads/
最新版已经出到2019了,可选择2017的版本,如下图:点击下载按钮,下载软件。
第二步:下载好后,安装Visual Studio 2017。
运行Installer软件,进入安装配置页面,配置设置如下:
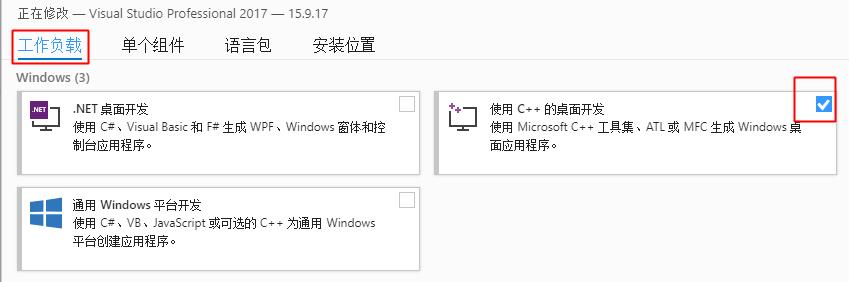
设置路径:工作负载 - Windows - 选择 “ 使用C++的桌面开发"
单个组件、语言包、安装位置均配置为『默认』。
配置完成后即可安装。
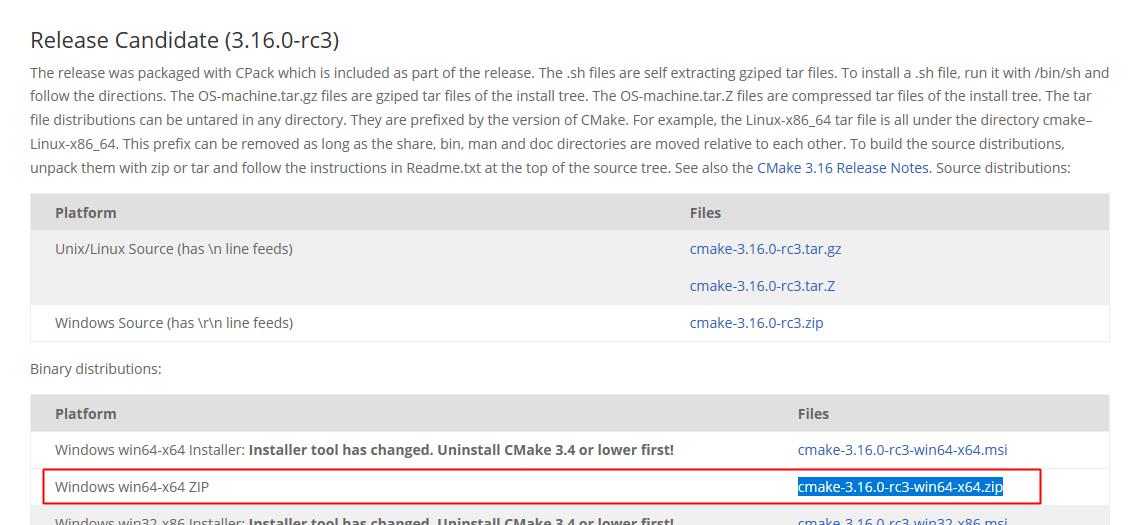
2.2 安装CMake
下载地址:https://cmake.org/download/ 下载版本:3.16.0
如下图,下载完成后解压即可。
设置系统环境变量:
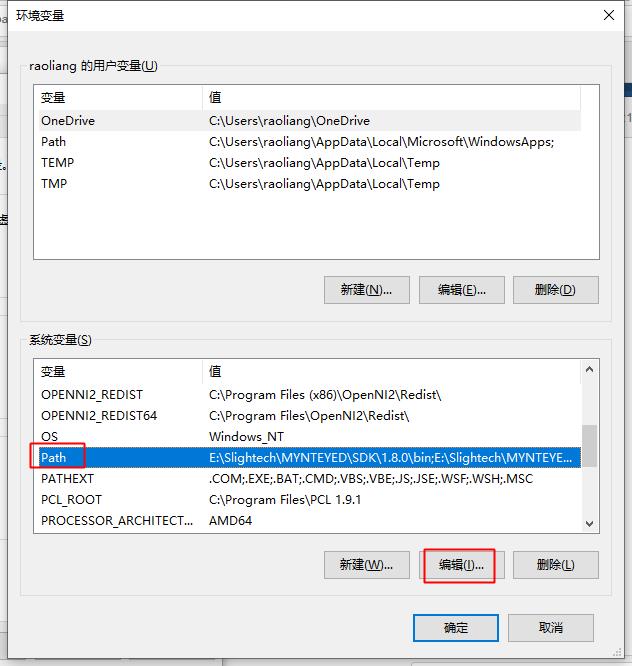
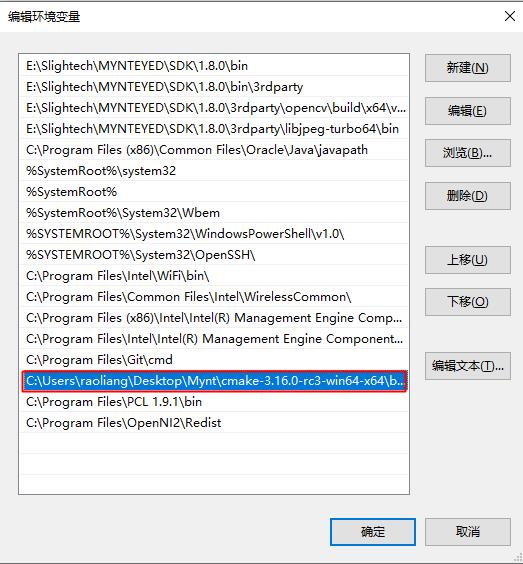
添加一个如图的环境变量,环境变量的路径是前面下载的压缩包的解压路径下的bin目录,比如:放到『桌面』,路径如下(这里仅仅是举例):
C:\\Users\\username\\Desktop\\cmake-3.16.0-rc3-win64-x64\\bin
2.3 安装SDK
SDK下载地址:
百度云盘:https://pan.baidu.com/s/1GeeZ-4-DVyZJ2wUh0aknjQ,下载mynteye-d-1.8.0-win-x64-opencv-3.4.3.exe即可。
点击EXE文件进行安装。请注意!不要安装到C盘,安装到磁盘空间稍大的盘符下。磁盘空间越大越好。
检查是否安装正确,安装完成后,系统环境变量应该如下:
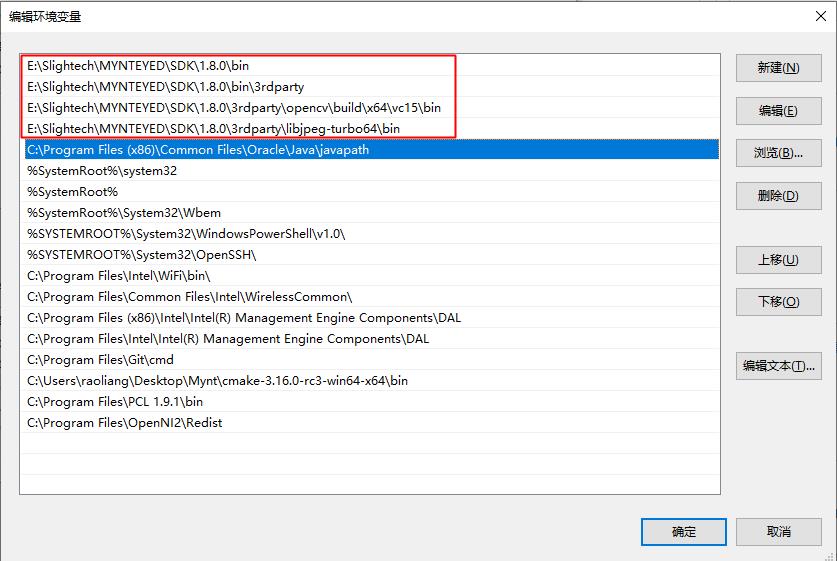
如果安装完成后没有环境变量,可以自己手动添加。
2.4 安装PCL
下载地址:https://github.com/PointCloudLibrary/pcl/releases
下载版本:选择如下图版本:

下载后安装,设置如下:
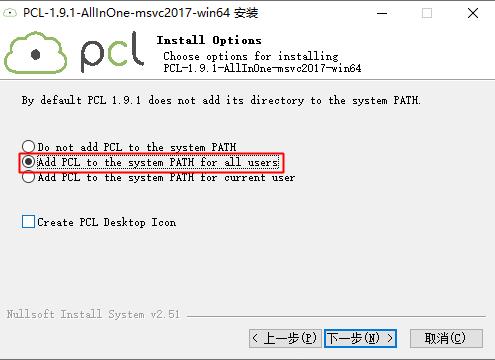
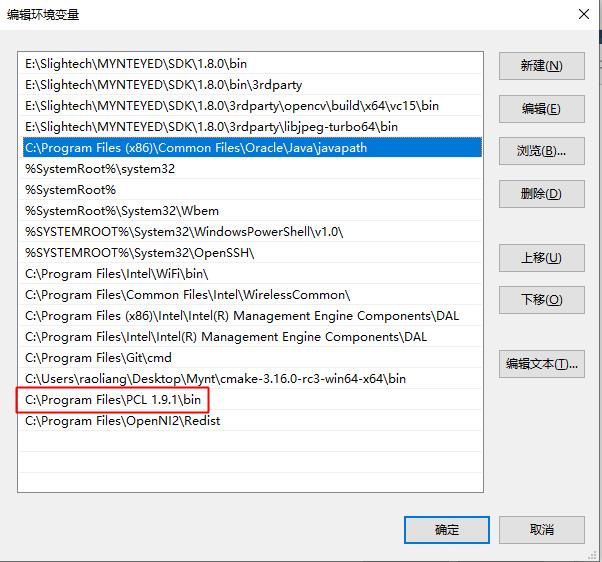
安装完成后,环境变量中应该有PCL的配置,如下图,如果没有,可以手动添加。
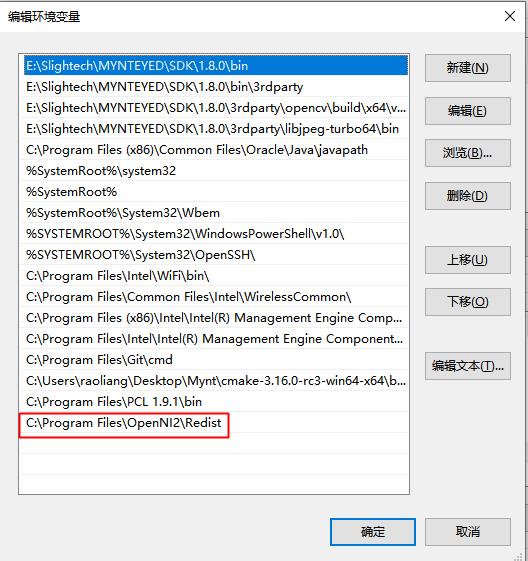
2.5 安装OPENNI2
下载地址:https://structure.io/openni,选择Windows对应的版本。
安装完成后,修改环境变量如下图:
3 数据采集
3.1 生成项目
假如环境搭建的第三步的SDK安装在E盘,双击运行 E:\\Slightech\\MYNTEYED\\SDK\\1.8.0\\samples 目录下的 generate.bat 文件
运行完成后,使用Visual Studio 2017打开_build目录下的 mynteye_samples.sln 文件。
如下图:
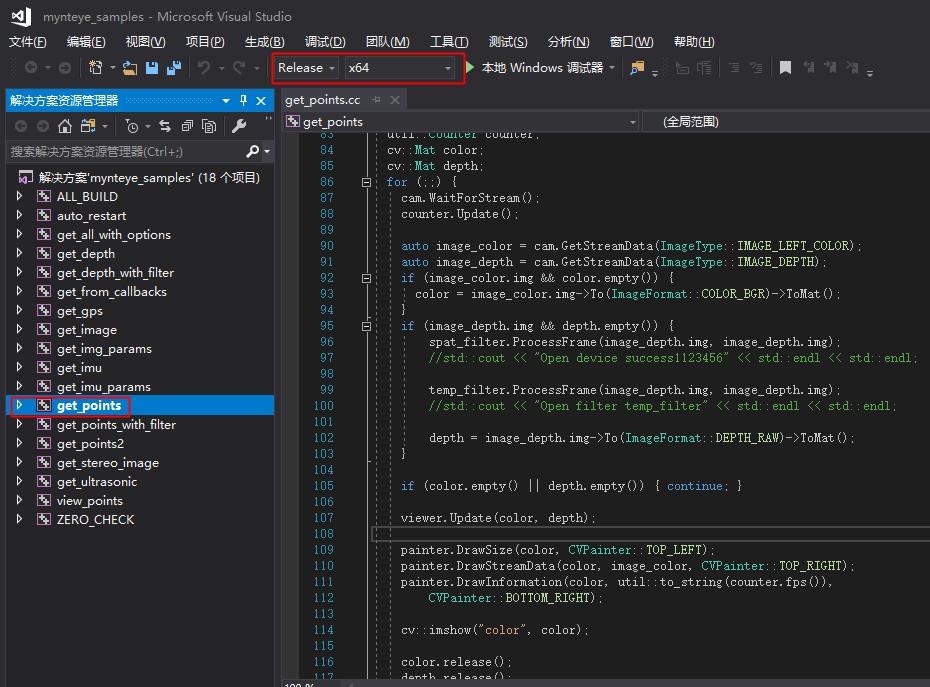
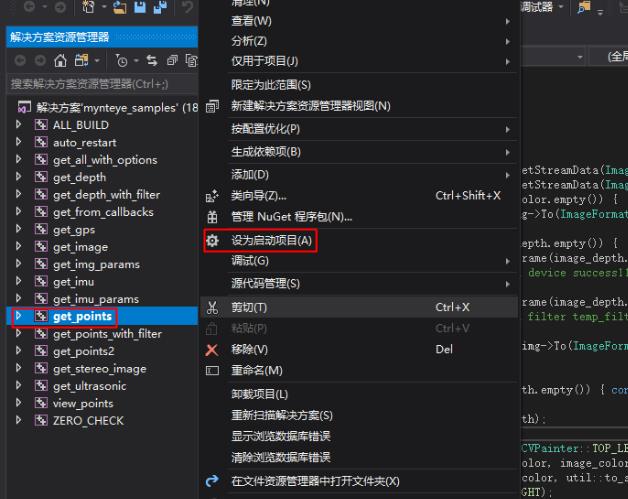
选择get_points项目,设为启动项,如下图:
3.2 运行摄像头,采集数据
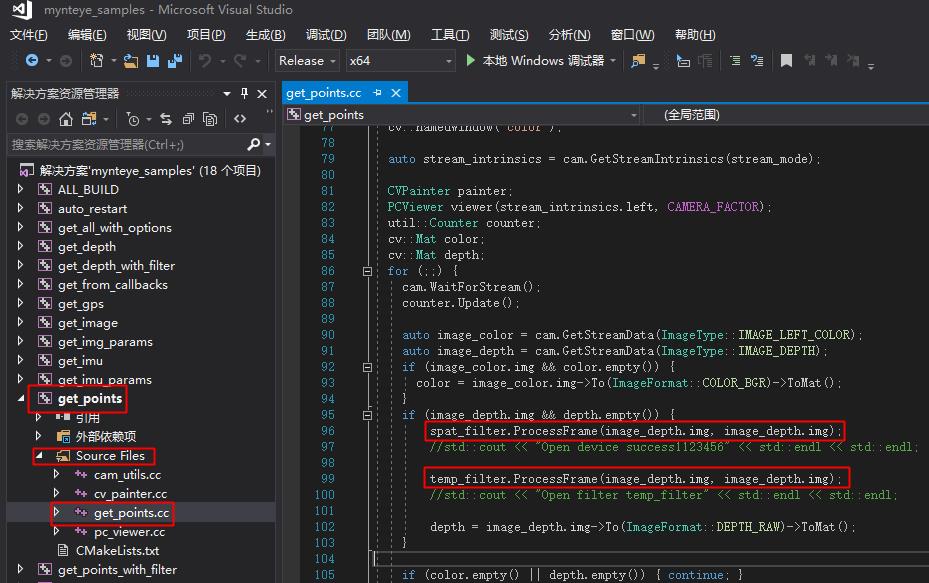
修改代码,如下,在 if (image_depth.img && depth.empty()) 代码后面添加如下两行代码:
spat_filter.ProcessFrame(image_depth.img, image_depth.img);
temp_filter.ProcessFrame(image_depth.img, image_depth.img);
如下图:
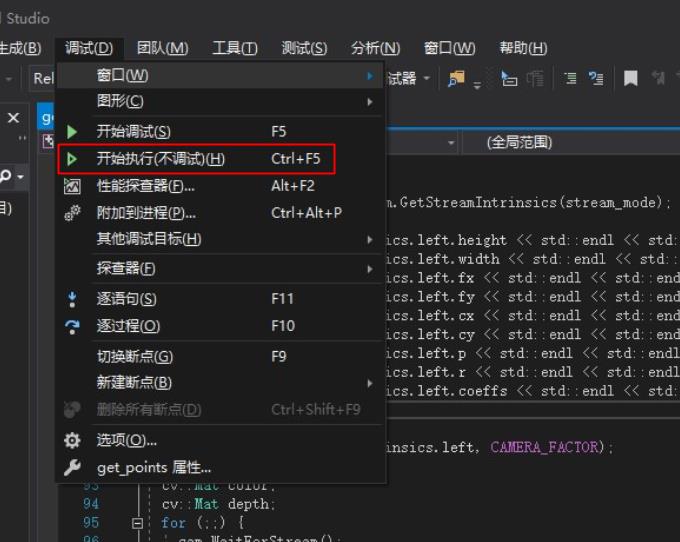
执行代码:
启动摄像头之后,将当前窗口切换到点云数据,对准采集目标,调整摄像头后,按下空格键即可采集数据。最终采集到的数据在
E:\\Slightech\\MYNTEYED\\SDK\\1.8.0\\samples_build目录下
3.3 数据解读
采集到的数据目录结构如下:
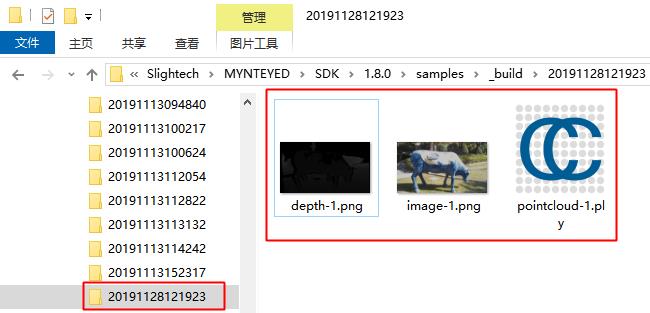
其中depth-1.png是深度图、image-1.png是对应的彩色图、pointcloud-1.ply文件是点云图。
该文件可以使用CloudCompare软件打开,如下:

在软件安装环节上,通过以上在电脑端的安装步骤可以了解,此款摄像头依赖的第三方软件及安装步骤相对多一些,对于没有开发经验的使用者来说可能会有一点的难度。
在拍摄或数据采集使用过程中,可以看到深圳轻客智能提供了非常全面的采集端SDK样例供用户选择、学习和使用。另外,为了方便大家熟练的使用该款摄像头,厂家还提供了完善的技术开发文档。
在采集数据的质量上,我们结合大型模型进行了数据采集,从采集的数据结果中可以发现,被采集的数据模型外形完整,轮廓完整也较清晰,虽对比之下在强光反射部分的采集清晰度稍弱,但整体来说采集的数据在工业场景中是推荐使用的。
常见问题可参考
- http://support.myntai.com/hc/kb/article/1226610/
- SDK下载:https://mynt-eye-d-sdk.readthedocs.io/zh_CN/latest/index.html
先分享到这里,更多商品可关注百度AI市场。
以上是关于百度AI市场MYNT EYE小觅双目摄像机开箱试用全记录的主要内容,如果未能解决你的问题,请参考以下文章