利用中断在 ESP32 MicroPython 程序中读取AM2302
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了利用中断在 ESP32 MicroPython 程序中读取AM2302相关的知识,希望对你有一定的参考价值。
简 介: 由于使用MicroPython,如果使用指令查询方式读取AM2302的数据,无法控制到非常精确读取时间信息。利用ESP32 MicroPython中的IO中断,获取AM2302的上升沿时间,利用ticks_cpu() 对于上升沿进行标定。然后在通过比较两个上升沿时间的差异,获取输出0,1数据。
通过数据验证测试,可以验证这种方式可以比较方便完成AM2302的读取。
关键词: AM2302,ESP32,MicroPython
§01 温湿度传感器
一、AM2302
AM2302 是一款具有单总线接口的温湿度传感器。接口协议与 1-Wire 有区别。由于该款传感器比较简洁,它只发送转换后的数据。因此输出数据格式比较简单。
1、总线协议
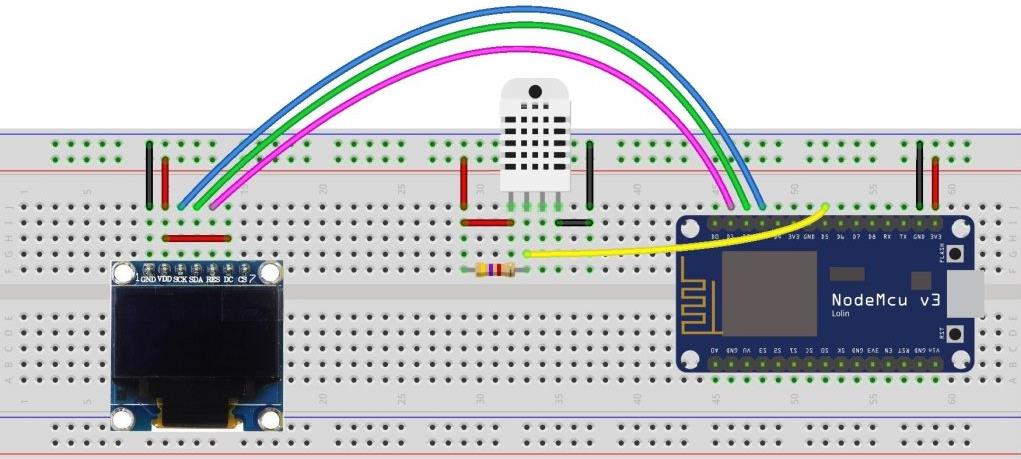
(1) 硬件连接关系
其中上拉电阻,在传输线的距离小于20米是选择 5k Ω; 大于20日是需要根据实际情况选择合适的上拉电阻。

▲ 图1.1.1 传感器与MCU之间的连接关系
(2) 总线数据格式

▲ 图1.1.2 总线数据格式
(3) 数据交互过程
主机通过发送一次开始信号(超过 500us低电平),从机AM2302变开始发送转换数据了。

▲ 图1.1.3.1 数据发送格式
总线空闲的时候为高电平,一次数据传输通讯是由主机(MCU)拉低总线 1 ~ 10ms 之后释放总线,延时 20 ~ 40us之后,主机便开始检测从机(AM2302)的输出响应信号。
从机开始应答开始部分,发送出一个80us低电平。
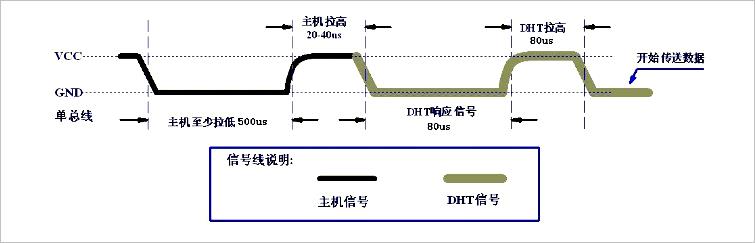
▲ 图1.1.3.2 从机开始应答开始部分,发送出一个80us低电平
下面给出了 DHT发送数字1, 0 的波形。

▲ 图1.1.3.3 发送数字信号1的波形

▲ 图1.1.3.4 发送数字0的波形
二、读取方法
1、使用STM32查询方法
由于单片机STM32运行速度比较快,因此可以通过软件延时的方式来获得AM2302的输出波数据。
2、使用端口中断
也可以利用单片机的端口中断完成对于总线波形时刻的记录,然后在通过对于中断后时刻判断输出的数据位。
§02 MicroPython读取
如果在MicroPython环境下,MicroPython执行比较缓慢,因此采用查询方式获得数据会存在困难。而直接使用 ESP32 MicroPython 1-Wire 协议读取AM2302会存在错误。这在 ESP32 One-Wire驱动功能 测试中也反映直接使用ESP32 MicroPython 的1-wire 驱动读取AM2302存在错误。
一、中断读取AM2302数据
1、基本原理
在 微型角度编码器 : KYTB-1503-1024 测试了 ESP32 MicroPython 的端口相应外部脉冲中断的能力。可以看到ESP32最大的脉冲响应速率为26kHz。比起AM2302的单个数据输出周期小,因此可以借助ESP32 MicroPython 端口中断读取定时器的时间来记录 AM2302输出脉冲的宽窄内容。
2、实验配置
使用 ESP32-S模块转接板设计与实现 模块的输出 GPIO2作为触发AM2302总线的端口。
(1) 测试硬件平台
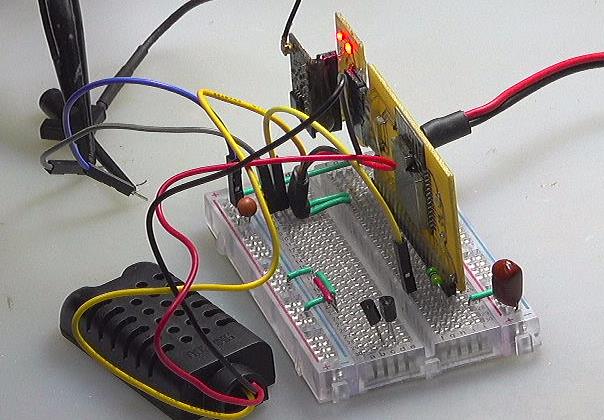
▲ 图2.1.1 测试平台
(2) 测试代码
from machine import Pin,Timer
import time
io1 = Pin(2, Pin.OUT)
io1.on()
while True:
io1.off()
time.sleep_ms(5)
io1.on()
time.sleep_ms(1000)
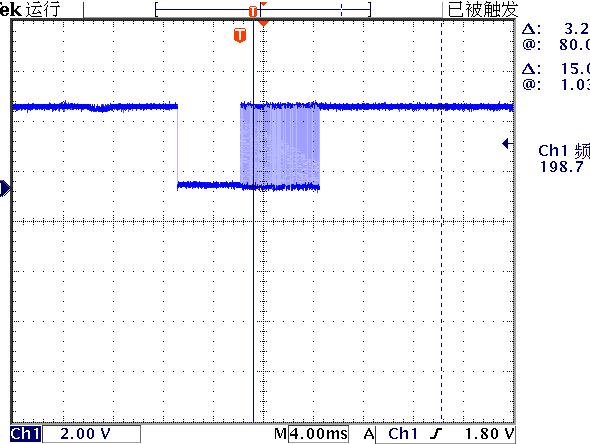
(3) 测试波形
测量对应的波形如下图所示。由于ESP32输出高平,使得AM2302相应信号变成了高电平。因此,需要将ESP32设置成高阻形式来读取AM2320响应数据。

▲ 图2.1.2 测量IO波形
将ESP32的GPIO的模式修改成 OPEN_DRAIN,重新读取总线数据波形。
io1 = Pin(2, Pin.OPEN_DRAIN)
io1.on()
▲ 图2.1.3 将输出模式改成 OPEN_DRAIN 之后得到的波形

▲ 图2.1.4 展开IO数据波形
3、记录时间
使用ESP32的 time.tick_us(), time_tick_cpu() 获得ESP32的高分辨率的时钟数据。
(1) 测试代码
from machine import Pin,Timer
import time
io1 = Pin(2, Pin.OPEN_DRAIN)
io1.on()
bufLength = 128
timebuf = [0] * bufLength
timepoint = 0
def ISR_io(pin):
global bufLength, timebuf, timepoint
t = time.ticks_cpu()
if timepoint < bufLength:
timebuf[timepoint] = t
timepoint += 1
io1.irq(trigger=Pin.IRQ_RISING, handler=ISR_io)
while True:
io1.off()
time.sleep_ms(5)
io1.on()
time.sleep_ms(5000)
print(timebuf)
timepoint = 0
[252517663, 252532392, 252556712, 252568518, 252583742, 252596740, 252609738, 252623106, 252638330, 252650136, 252672386, 252687610, 252707426, 252722650, 252734456, 252748226, 252763450, 252783266, 252798480, 252811478, 252824706, 252839930, 252851736, 252865506, 252880730, 252892536, 252906946, 252929358, 252950798, 252972238, 252993678, 253015118, 253036558, 253049556, 253064780, 253077778, 253091964, 253112064, 253134478, 253155918, 253177358, 253198798, 253220878, 253233876, 253247124, 253262102, 253275100, 253288098, 253301504, 253316728, 253329726, 253342944, 253358168, 253369974, 253383742, 253398966, 253410772, 253424542, 253439756, 253452754, 253465982, 253481206, 253493012, 253506782, 253522006, 253533812, 253546810, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
4、数据分析
(1) 时间取值
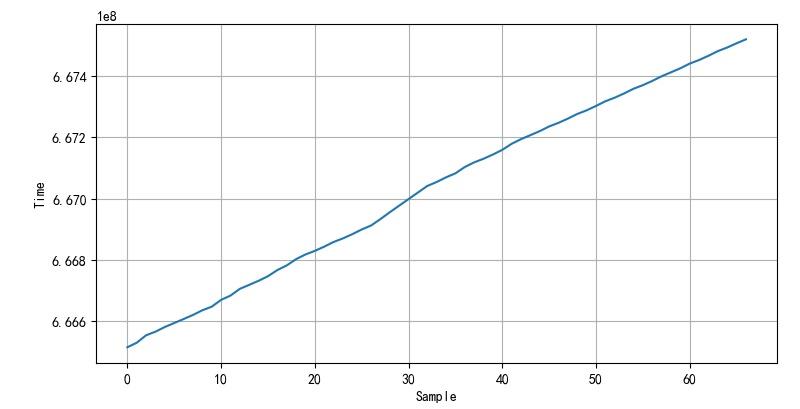
▲ 图2.1.4.1 读取的时间递增波形
(2) 时间差值
from headm import *
t = tspload('time', 't')
t = [tt for tt in t if tt > 0]
td = [1 if x-y > 18000 else 0 for x,y in zip(t[1:], t[:-1])]
printf(td)
printf(len(td))
plt.plot(td)
plt.xlabel("Sample")
plt.ylabel("Time")
plt.grid(True)
plt.tight_layout()
plt.show()

▲ 图2.1.4.2 读取的时间递增波形
(3) 译码0-1
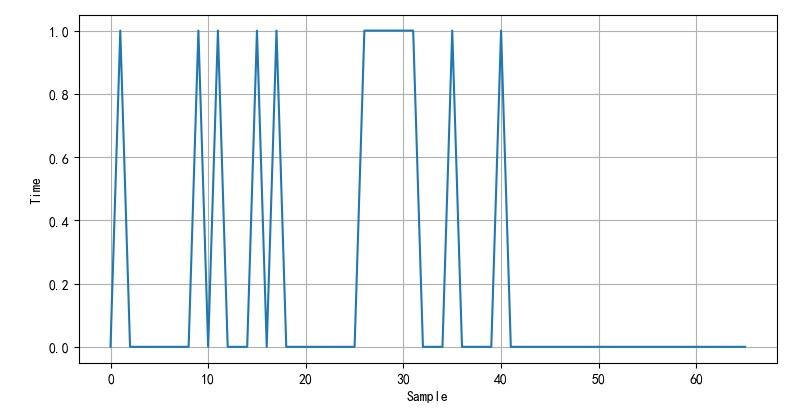
▲ 图2.1.4.3 时间译码01 波形
(4) 确定起始数据位
从前慢读取的数据来看,其中存在的脉冲个数为66,大约应该具有的40bit的数据,这说明其中存在一些无需要的 0。
需要根据校验和,来确定起始的位数。
t = [tt for tt in t if tt > 0]
td = [1 if x-y > 18000 else 0 for x,y in zip(t[1:], t[:-1])]
#td = [x-y for x,y in zip(t[1:], t[:-1])]
#------------------------------------------------------------
def bits2byte(bits):
return sum([b*(2**(len(bits)-e-1)) for b,e in zip(bits, list(range(len(bits))))])
def buf01_buf(buf, beginid=0):
num = []
for i in range(5):
id = beginid + i*8
nbits = buf[id:id+8]
num.append(bits2byte(nbits))
return num
for i in range(10):
num = buf01_buf(td, i)
printff(i, sum(num[0:4]) & 0xff, num[4])
下面校验了从beginid cs 0 变化到9,可以看到从0,1,2,3 都可以完成校验。
0 16 16
1 32 33
2 66 66
3 133 132
4 13 8
5 27 16
6 55 32
7 111 64
8 224 128
9 193 0
最后在根据输出的数字合理的数值范围,可以验证等beginid=2时,对应的数字帅帅正常的数值范围。
2 66 66
325
252
二、连续读取数据
1、完整的ESP32程序
from machine import Pin,Timer
import time
io1 = Pin(2, Pin.OPEN_DRAIN)
io1.on()
bufLength = 128
timebuf = [0] * bufLength
timepoint = 0
def ISR_io(pin):
global bufLength, timebuf, timepoint
t = time.ticks_cpu()
if timepoint < bufLength:
timebuf[timepoint] = t
timepoint += 1
io1.irq(trigger=Pin.IRQ_RISING, handler=ISR_io)
def bits2byte(bits):
return sum([b*(2**(len(bits)-e-1)) for b,e in zip(bits, list(range(len(bits))))])
def buf01_buf(buf, beginid=0):
num = []
for i in range(5):
id = beginid + i*8
nbits = buf[id:id+8]
num.append(bits2byte(nbits))
return num
def timebuf2data():
t = [tt for tt in timebuf if tt > 0]
td = [1 if x-y > 18000 else 0 for x,y in zip(t[1:], t[:-1])]
if len(td) < 40: return 0,0,1
num = buf01_buf(td, 2)
humidity = num[0]*256 + num[1]
temperature = num[2]*256 + num[3]
error = 0
check = sum(num[0:4])&0xff
if check != num[4]:
error = 1
return humidity, temperature, error
while True:
io1.off()
time.sleep_ms(5)
io1.on()
time.sleep_ms(500)
h,t,e = timebuf2data()
if e == 0:
print((h,t))
timepoint = 0
timebuf = [0]*bufLength
2、读取数据曲线
在下面数据中,首先使用手拿起AM2302传感器,然后通过往其中吹气增加其中的湿度以及温度。可以看到这个参量发生着改变。

▲ 图2.2.1 连续读取的数值
※ 实验结论 ※
虽然ESP32 的MicroPython环境具有1-wire驱动协议,但对于 AM2302的单线输出数据波形,直接使用ESP32并不能够读取AM2302的数据。
由于使用MicroPython,如果使用指令查询方式读取AM2302的数据,无法控制到非常精确读取时间信息。利用ESP32 MicroPython中的IO中断,获取AM2302的上升沿时间,利用ticks_cpu() 对于上升沿进行标定。然后在通过比较两个上升沿时间的差异,获取输出0,1数据。
通过数据验证测试,可以验证这种方式可以比较方便完成AM2302的读取。
■ 相关文献链接:
- AM2302
- 1-Wire
- ESP32 MicroPython 1-Wire
- ESP32 One-Wire驱动功能
- 微型角度编码器 : KYTB-1503-1024
- ESP32-S模块转接板设计与实现
● 相关图表链接:
以上是关于利用中断在 ESP32 MicroPython 程序中读取AM2302的主要内容,如果未能解决你的问题,请参考以下文章