PCL:基于区域生长的点云分割原理与实现
Posted 没事就要敲代码
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PCL:基于区域生长的点云分割原理与实现相关的知识,希望对你有一定的参考价值。
1 基本思想
区域生长的基本思想是将具有相似性质的点集合起来构成区域。首先对每个需要分割的区域找出一个种子作为生长的起点,然后将种子周围邻域中与种子有相同或相似性质的点(根据事先确定的生长或相似准则来确定,多为法向量、曲率)归并到种子所在的区域中。而新的点继续做种子向四周生长,直到再没有满足条件的点可以包括进来,一个区域就生长而成了。
基于曲率的区域生长,其结果是一个或多个聚类集合,每个聚类集合被认为是同一光滑表面的一部分。首先依据点的曲率对点进行排序,初始种子点所在区域为最平滑的区域,这样可以减少分割区域的总数。pcl::RegionGrowing 类就是采用的这种方法。
2 算法流程
- 设置一个空的种子点序列和一个空的聚类数组,选择种子点(曲率最小的点)并将其加入到种子点序列中;
- 搜索当前种子点的邻域点,计算邻域点的法线与当前种子点的法线之间的夹角,小于平滑阈值的邻域点加入到当前区域;
- 检查每一个邻域点的曲率,小于曲率阈值的邻域点加入到种子点序列中,并删除当前种子点,以新的种子点继续生长。
- 重复进行以上生长过程,直到种子点序列被清空。此时,一个区域生长完成,并将其加入到聚类数组中;
- 对剩余点重复进行以上步骤,直到遍历完所有点。
伪代码:
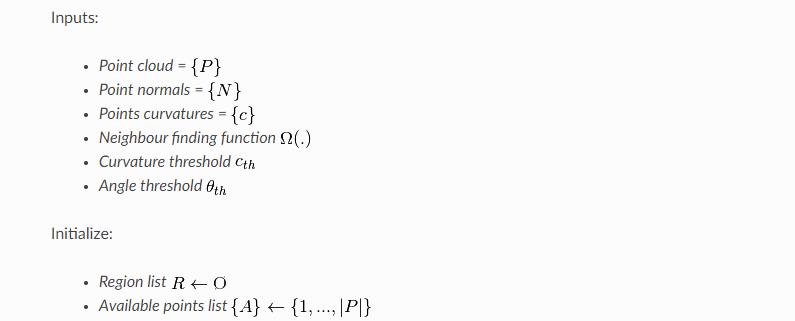

3 代码实现
代码:
#include <pcl/io/pcd_io.h>
#include <pcl/search/search.h>
#include <pcl/search/kdtree.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/segmentation/region_growing.h>
using namespace std;
int main()
{
//------------------------------- 加载点云 -------------------------------
cout << "->正在加载点云..." << endl;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("road.pcd", *cloud) < 0)
{
PCL_ERROR("\\a点云文件不存在!\\n");
system("pause");
return (-1);
}
cout << "->加载点的个数:" << cloud->points.size() << endl;
//========================================================================
//------------------------------- 法线估计 -------------------------------
cout << "->正在估计点云法线..." << endl;
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne; //创建法线估计对象ne
pcl::search::Search<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>); //设置搜索方法
pcl::PointCloud <pcl::Normal>::Ptr normals(new pcl::PointCloud <pcl::Normal>); //存放法线
ne.setSearchMethod(tree);
ne.setInputCloud(cloud);
ne.setKSearch(20);
ne.compute(*normals);
//========================================================================
//------------------------------- 区域生长 -------------------------------
cout << "->正在进行区域生长..." << endl;
pcl::RegionGrowing<pcl::PointXYZ, pcl::Normal> rg; //创建区域生长分割对象
rg.setMinClusterSize(50); //设置满足聚类的最小点数
rg.setMaxClusterSize(99999999); //设置满足聚类的最大点数
rg.setSearchMethod(tree); //设置搜索方法
rg.setNumberOfNeighbours(30); //设置邻域搜索的点数
rg.setInputCloud(cloud); //设置输入点云
rg.setInputNormals(normals); //设置输入点云的法向量
rg.setSmoothnessThreshold(3.0 / 180.0 * M_PI); //设置平滑阈值,弧度,用于提取同一区域的点
rg.setCurvatureThreshold(1.0); //设置曲率阈值,如果两个点的法线偏差很小,则测试其曲率之间的差异。如果该值小于曲率阈值,则该算法将使用新添加的点继续簇的增长
vector<pcl::PointIndices> clusters; //聚类索引向量
rg.extract(clusters); //获取聚类结果,并保存到索引向量中
cout << "->聚类个数为" << clusters.size() << endl;
//========================================================================
//---------------------- 为聚类点云添加颜色,并可视化 ----------------------
pcl::PointCloud <pcl::PointXYZRGB>::Ptr colored_cloud = rg.getColoredCloud();
pcl::visualization::CloudViewer viewer("区域生长结果");
viewer.showCloud(colored_cloud);
while (!viewer.wasStopped())
{
}
//========================================================================
return (0);
}
输出结果:
->正在加载点云...
->加载点的个数:200293
->正在估计点云法线...
->正在进行区域生长...
->聚类个数为31
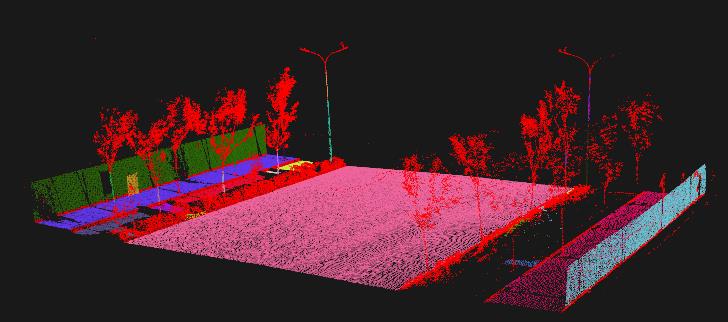
4 区域生长结果展示
相关链接:
以上是关于PCL:基于区域生长的点云分割原理与实现的主要内容,如果未能解决你的问题,请参考以下文章