干货分享 | 机器人学中的状态估计——学习笔记
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了干货分享 | 机器人学中的状态估计——学习笔记相关的知识,希望对你有一定的参考价值。
最近学习了关于《机器人学中的状态估计》这本书,以下就是我对该本书的大致理解,和大家一起分享下学习经验。 以下文章干货内容较多,均是我的个人学习心得的分享,如有错误,还请大家指正。
1.基础概念 这本书可以说是SLAM入门系列神书之一,用深入浅出的言语告诉我们状态估计是怎么一回事。经过多年的发展,状态估计理论已经有了许多直接、重要的结果。比如卡尔曼滤波,最小二乘估计,最大后验估计等。这些结果在解决目标跟踪,定位,建图,轨迹融合等问题中占据着核心位置,并广泛应用于自动驾驶,机器人和无人机领域。那么什么是状态估计,状态估计就是理解传感器的本质。比如下图1就是典型的状态估计问题: 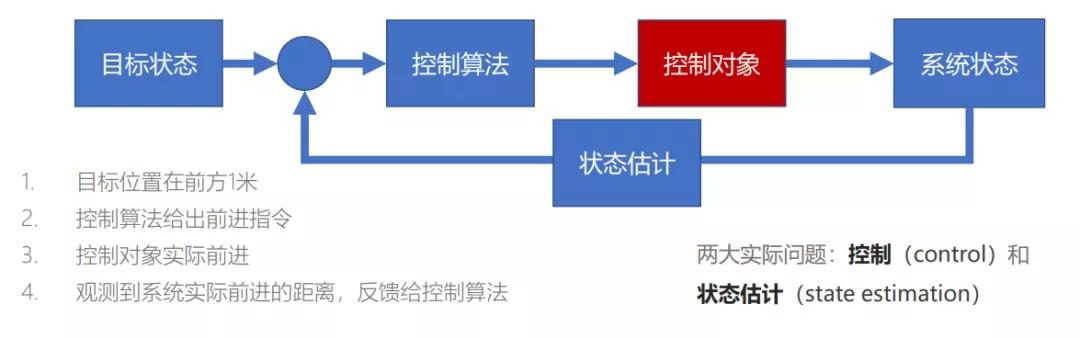 图 1
图 1
但是,传感器的精度是有限的,如何利用传感器信息,尽可能准确的估计一组完整描述机器人随时间运动的物理量,如位置,速度,角度和角速度等,是状态估计领域要解决的最主要问题。因此,稳定,准确的状态估计是机器人稳定控制的必要基础。我们要知道SLAM问题的关键就是残差函数的最小二乘求解。“残差函数 = 测量值 – 估计值”,估计值就是我们根据传感器的模型去预估出来的。模型是好建立的,估计过程却是不好做的事情,需要考虑到噪声,偏置等其他不可估计量。尽管可以全部丢给后端优化,但是没有一个好的初值,后端优化可能会陷入局部最优,无法给到全局最优的结果。
2.重要概念 2.1 PDF函数和高斯分布 下面我们进入正题,首先这本书先介绍了PDF函数以及高斯分布下的线性变化后的均值和协方差如何变化,这里默认变量是二维。PDF在区间上积分就是概率。相信很多人一开始对先验概率,似然概率,后验概率没有很系统的认知,处于很懵的状态。那么我在这里就简单解释下,如果你对这些概率还是很模糊的话,那么就需要回去多看看书了。先验就是没有观测值的概率分布,也可以理解为初始值。似然就是观测的概率分布,后验估计就是加入观测后的概率分布,可以看作是对先验估计的矫正。
接下来就是条件概率,联合概率以及大名鼎鼎的贝叶斯公式。这里简单解释下条件概率,例如p(x|y),就是x在y的条件下发生的概率是多少。我们可以把y看作是条件。举一个很简单的例子,明天下雨的概率是多少。条件y是明天,要求的x是下雨的概率。
贝叶斯公式:联合 = 条件 * 边缘 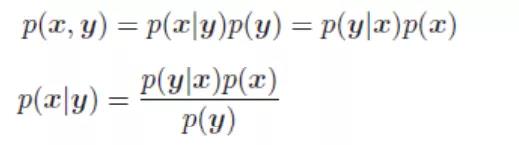
赋予该式物理意义:x = 状态,y = 传感器读数,p(y|x) = 传感器模型,p(x|y) = 状态估计。
上式可以说是本书最重要的内容之一,很多内容都会涉及到这里。
2.2 LG和MAP 然后带我们了解了LG和NLNG系统的区别以及有什么不同的处理方式。提到LG系统怎么能不提MAP方法,作为一种离散时间的批量估计方法,最大后验估计(MAP)无疑是最直观的。最大后验估计顾名思义,已知测量和输入的情况下,怎么才能估计出下一时刻最优值。下式先根据贝叶斯公式做了变形。由于分母和无关,直接舍去。
 下图是取完对数的情况,由于各时刻,输入的噪声都是无关的,上面两个项可以因式分解。然后求最小二乘的解就是我们要的最优解。我们把第一个时刻的先验提取出来,单独作用于第一个的估计。
下图是取完对数的情况,由于各时刻,输入的噪声都是无关的,上面两个项可以因式分解。然后求最小二乘的解就是我们要的最优解。我们把第一个时刻的先验提取出来,单独作用于第一个的估计。 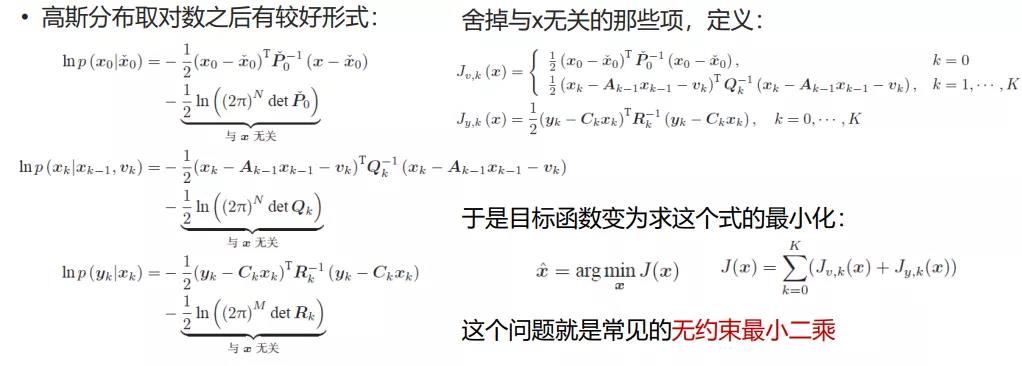 推导完了批量MAP,接下来就是递归平滑算法,由于篇幅受限,我们就不再赘叙了,我们只需要知道递归的算法流程等价于传统的RTS平滑算法,五个前向的迭代等价于著名的卡尔曼滤波器。本书中对于卡尔曼滤波的推导,让我打开了新的思路,原来卡尔曼还可以这么推导。几种扩展卡尔曼滤波的介绍,也给我提供了更多的思路。尽管公式繁杂,但是一步一个脚印的推导过来,你会发现是一件很有成就的事情。
推导完了批量MAP,接下来就是递归平滑算法,由于篇幅受限,我们就不再赘叙了,我们只需要知道递归的算法流程等价于传统的RTS平滑算法,五个前向的迭代等价于著名的卡尔曼滤波器。本书中对于卡尔曼滤波的推导,让我打开了新的思路,原来卡尔曼还可以这么推导。几种扩展卡尔曼滤波的介绍,也给我提供了更多的思路。尽管公式繁杂,但是一步一个脚印的推导过来,你会发现是一件很有成就的事情。
2.3NLNG和EKF 在接下来,就是NLNG系统,可以说LG系统过于理想化,现实生活中基本不存在这样的模型,无论什么样的系统都会有噪声。那么卡尔曼滤波都失效了,有什么好的方法呢?大牛们就提出了EKF,可以用来处理非线性模型。

EKF同时还假设了马尔可夫性,给定现在时刻的状态时,未来时刻状态与过去时刻是条件独立的。那么就可以根据递归来估计最新时刻的估计值。下式中,我们把最新的观测分离出来。  右式第一项比较好处理,第二项则需要引入k-1时刻的状态。由于马尔科夫性,不必在引入k-1时刻之前的内容。
右式第一项比较好处理,第二项则需要引入k-1时刻的状态。由于马尔科夫性,不必在引入k-1时刻之前的内容。  因为篇幅有限,接下来的推导就不做展开,不做推导,感兴趣的同学可以自己尝试推一推。
因为篇幅有限,接下来的推导就不做展开,不做推导,感兴趣的同学可以自己尝试推一推。
2.4四元数和欧拉角 后面几章的三维刚体变化以及李群李代数也是SLAM的基础知识,学完这些,你需要知道什么是欧拉角,四元数,反对称矩阵以及归一化后的变换矩阵之间的转换关系。四元数的叉乘,点乘以及几种常用的公式,都是需要掌握的。这里具体的公式大家可以自行上网查找。
2.5李群李代数 对于李群和李代数,大家需要知道李群和李代数之间的转换关系,指数映射和对数映射是谁对谁,在球面上是不是满射。在SLAM问题中,位姿是未知的,而我们需要解决“什么样的相机位姿符合当前观测数据”。如前所言,旋转矩阵是带有约束的,行列式为1且为正交矩阵。作为变量带入BA中,无疑会增加难度。李代数我们在求解最小二乘问题,提供无约束的变量,可以减少BA维护维度。还有李代数的右乘和左乘扰动模型,对于我们求微小量有很大的帮助。李代数和李群还有许多性质,这里说不完,等待大家自己去发现。
3.结束语 写在最后,世上无难事,只怕肯攀登。确实,学习本就是个累积的过程。不积跬步无以至千里,不积小流无以至江海。可能这条道路上充满了挑战和未知,但是面对未知的挑战,大家应该感觉到兴奋,因为人类就喜欢在未知的领域中迎接挑战,不要害怕,公式和代码不过是纸老虎而已。一遍不行,那就三遍。慢慢的你就会发现,你对纸老虎的害怕早就荡然无存,更何况我们还是站在巨人的肩膀上。加油吧,同学们,SLAM的路虽然艰苦但是很有趣。
关注阿木实验室GZH,后台回复:“机器人学习” 可领取免费学习资料!
这世上所有好走的路都是下坡路,努力上坡!写给诸君共勉。
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。
阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!
以上是关于干货分享 | 机器人学中的状态估计——学习笔记的主要内容,如果未能解决你的问题,请参考以下文章