ROS仿真笔记之——gazebo配置velodyne
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS仿真笔记之——gazebo配置velodyne相关的知识,希望对你有一定的参考价值。
之前博客《ROS仿真笔记之——基于gazebo的event camera仿真(dvs gazebo)》介绍了在gazebo里面配置dvs sensor,本博文将velodyne也加上,并且在dvs camera里面加入image,使得仿真的event camera在输出event stream的同时,也可以输出图片。
首先把需要用到的so文件放在一个文件夹中,方便使用
然后更改机器人的.urdf.xacro文件,把VLP-16 sensor加进去
<!-- 加入激光雷达 -->
<xacro:include filename="/home/kwanwaipang/gazebo_so/VLP_16_model/VLP-16.urdf.xacro"/>
<xacro:VLP-16 parent="base_link" name="velodyne" topic="/velodyne_points" hz="10" samples="440" gpu="${gpu}">
<origin xyz="0 0 0.2" rpy="0 0 0" />
</xacro:VLP-16>
注意:对应的VLP-16.urdf.xacro文件里面的路径需要更改
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="VLP-16">
<xacro:property name="M_PI" value="3.1415926535897931" />
<xacro:macro name="VLP-16" params="*origin parent:=base_link name:=velodyne topic:=/velodyne_points hz:=10 lasers:=16 samples:=1875 collision_range:=0.3 min_range:=0.9 max_range:=130.0 noise:=0.008 min_angle:=-${M_PI} max_angle:=${M_PI} gpu:=false">
<joint name="${name}_base_mount_joint" type="fixed">
<xacro:insert_block name="origin" />
<parent link="${parent}"/>
<child link="${name}_base_link"/>
</joint>
<link name="${name}_base_link">
<inertial>
<mass value="0.83"/>
<origin xyz="0 0 0.03585"/>
<inertia ixx="${(0.83 * (3.0*0.0516*0.0516 + 0.0717*0.0717)) / 12.0}" ixy="0" ixz="0"
iyy="${(0.83 * (3.0*0.0516*0.0516 + 0.0717*0.0717)) / 12.0}" iyz="0"
izz="${0.5 * 0.83 * (0.0516*0.0516)}"/>
</inertial>
<visual>
<geometry>
<mesh filename="/home/kwanwaipang/gazebo_so/VLP_16_model/meshes/VLP16_base_1.dae" />
</geometry>
</visual>
<visual>
<geometry>
<mesh filename="//home/kwanwaipang/gazebo_so/VLP_16_model/meshes/VLP16_base_2.dae" />
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0.03585"/>
<geometry>
<cylinder radius="0.0516" length="0.0717"/>
</geometry>
</collision>
</link>
<joint name="${name}_base_scan_joint" type="fixed" >
<origin xyz="0 0 0.0377" rpy="0 0 0" />
<parent link="${name}_base_link" />
<child link="${name}"/>
</joint>
<link name="${name}">
<inertial>
<mass value="0.01"/>
<origin xyz="0 0 0"/>
<inertia ixx="1e-7" ixy="0" ixz="0" iyy="1e-7" iyz="0" izz="1e-7"/>
</inertial>
<visual>
<origin xyz="0 0 -0.0377" />
<geometry>
<mesh filename="//home/kwanwaipang/gazebo_so/VLP_16_model/meshes/VLP16_scan.dae" />
</geometry>
</visual>
</link>
<!-- Gazebo requires the velodyne_gazebo_plugins package -->
<gazebo reference="${name}">
<xacro:if value="${gpu}">
<sensor type="gpu_ray" name="${name}-VLP16">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>${hz}</update_rate>
<ray>
<scan>
<horizontal>
<samples>${samples}</samples>
<resolution>1</resolution>
<min_angle>${min_angle}</min_angle>
<max_angle>${max_angle}</max_angle>
</horizontal>
<vertical>
<samples>${lasers}</samples>
<resolution>1</resolution>
<min_angle>-${15.0*M_PI/180.0}</min_angle>
<max_angle> ${15.0*M_PI/180.0}</max_angle>
</vertical>
</scan>
<range>
<min>${collision_range}</min>
<max>${max_range+1}</max>
<resolution>0.001</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.0</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_laser_controller" filename="/home/kwanwaipang/gazebo_so/libgazebo_ros_velodyne_gpu_laser.so">
<topicName>${topic}</topicName>
<frameName>${name}</frameName>
<min_range>${min_range}</min_range>
<max_range>${max_range}</max_range>
<gaussianNoise>${noise}</gaussianNoise>
</plugin>
</sensor>
</xacro:if>
<xacro:unless value="${gpu}">
<sensor type="ray" name="${name}-VLP16">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>${hz}</update_rate>
<ray>
<scan>
<horizontal>
<samples>${samples}</samples>
<resolution>1</resolution>
<min_angle>${min_angle}</min_angle>
<max_angle>${max_angle}</max_angle>
</horizontal>
<vertical>
<samples>${lasers}</samples>
<resolution>1</resolution>
<min_angle>-${15.0*M_PI/180.0}</min_angle>
<max_angle> ${15.0*M_PI/180.0}</max_angle>
</vertical>
</scan>
<range>
<min>${collision_range}</min>
<max>${max_range+1}</max>
<resolution>0.001</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.0</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_laser_controller" filename="/home/kwanwaipang/gazebo_so/libgazebo_ros_velodyne_laser.so">
<topicName>${topic}</topicName>
<frameName>${name}</frameName>
<min_range>${min_range}</min_range>
<max_range>${max_range}</max_range>
<gaussianNoise>${noise}</gaussianNoise>
</plugin>
</sensor>
</xacro:unless>
</gazebo>
</xacro:macro>
</robot>
更改对应的gazebo.xacro文件,把该加进去的sensor.so文件加进去
<!-- camera -->
<gazebo reference="camera_rgb_frame">
<sensor type="camera" name="camera1">
<!-- <update_rate>30.0</update_rate> -->
<camera name='__default__'>
<horizontal_fov>1.8</horizontal_fov>
<image>
<width>128</width>
<height>128</height>
<!-- <format>R8G8B8</format> -->
</image>
<clip>
<near>0.1</near>
<far>100</far>
</clip>
<!-- <noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise> -->
</camera>
<update_rate>60</update_rate>
<alwaysOn>1</alwaysOn>
<visualize>0</visualize>
<plugin name="camera_controller" filename="/home/kwanwaipang/catkin_ws/devel/lib/libgazebo_dvs_plugin.so">
<!-- <alwaysOn>true</alwaysOn> -->
<!-- <alwaysOn>1</alwaysOn> -->
<!-- <update_rate>60</update_rate> -->
<!-- <visualize>0</visualize> -->
<!-- <updateRate>0.0</updateRate> -->
<eventThreshold>8</eventThreshold>
<cameraName>camera1</cameraName>
<robotNamespace>/</robotNamespace>
<!-- <imageTopicName>image_raw</imageTopicName> -->
<eventsTopicName>events</eventsTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<!-- <frameName>camera_rgb_optical_frame</frameName> -->
<!-- <hackBaseline>0.07</hackBaseline> -->
<!-- <distortionK1>0.0</distortionK1> -->
<!-- <distortionK2>0.0</distortionK2> -->
<!-- <distortionK3>0.0</distortionK3> -->
<!-- <distortionT1>0.0</distortionT1> -->
<!-- <distortionT2>0.0</distortionT2> -->
</plugin>
<!-- 把普通的camera也加入 -->
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<cameraName>camera1</cameraName>
<imageTopicName>rgb/image_raw</imageTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
对应的davis_mono.launch如下
<launch>
<!-- camera driver -->
<node name="davis_ros_driver" pkg="davis_ros_driver" type="davis_ros_driver" />
<!-- visualization -->
<node name="dvs_renderer" pkg="dvs_renderer" type="dvs_renderer">
<!-- <param name="display_method" value="grayscale"/> -->
<param name="display_method" value="red-blue"/>
<!-- <remap from="events" to="/dvs/events" /> -->
<remap from="events" to="/camera1/events" />
<!-- <remap from="image" to="/dvs/image_raw" /> -->
<remap from="image" to="/camera1/rgb/image_raw" />
<!-- <remap from="camera_info" to="/dvs/camera_info" /> -->
<remap from="camera_info" to="/camera1/rgb/camera_info" />
</node>
<!-- display -->
<node name="image_view" pkg="rqt_image_view" type="rqt_image_view">
<remap from="image" to="dvs_rendering"/>
</node>
<!-- configure -->
<node name="rqt_reconfigure" pkg="rqt_reconfigure" type="rqt_reconfigure" />
</launch>
然后运行(注意xacro里面有中文可能会导致运行不了~)
roslaunch turtlebot3_navigation dvs_test.launch
rosrun turtlebot3_teleop turtlebot3_teleop_key
rostopic echo camera1/event1
roslaunch dvs_renderer davis_mono.launch
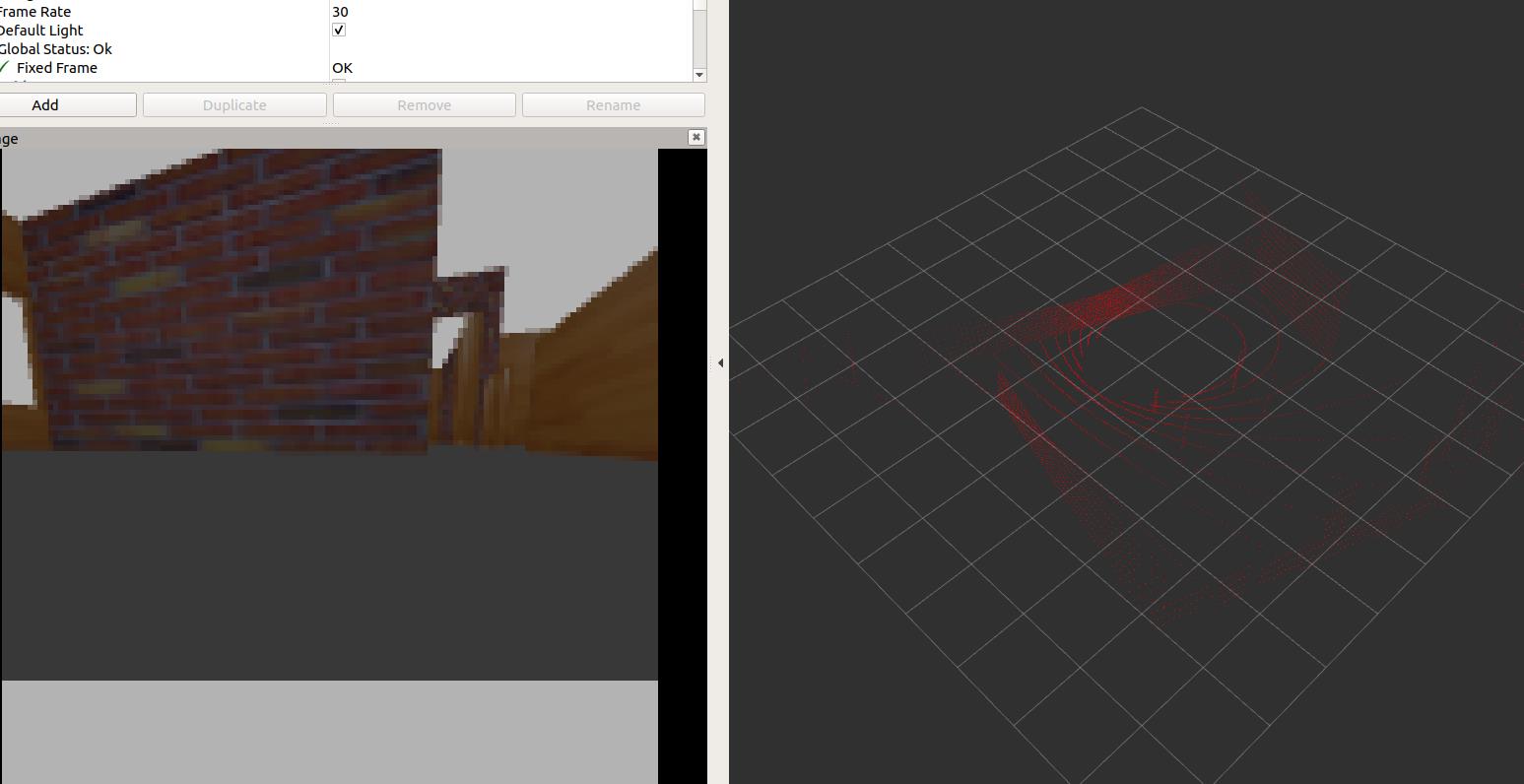
rosrun rviz rviz图片效果:

视频效果:
dvs
以上是关于ROS仿真笔记之——gazebo配置velodyne的主要内容,如果未能解决你的问题,请参考以下文章