最新「智能车联网」综述论文,170篇文献全面概述智能车联网技术
Posted 人工智能博士
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了最新「智能车联网」综述论文,170篇文献全面概述智能车联网技术相关的知识,希望对你有一定的参考价值。
点上方人工智能算法与Python大数据获取更多干货
在右上方 ··· 设为星标 ★,第一时间获取资源
仅做学术分享,如有侵权,联系删除
转载于 :专知
智能化的车联网是网络领域最活跃的研究主题之一,其核心是通过感应器收集信息,利用车联网通信技术将收集的信息集合起来,实现车辆精准定位、智能交叉路口管理、合作式自适应巡航控制、车辆早期安全预警、紧急消息广播以及自动驾驶等智能化车联网系统,为车辆驾驶员和乘客提供安全、高效、舒适的驾驶体验。本文将为大家介绍一篇2021年最新智能车联网综述。该综述对车联网关键技术:信息收集单元、数据传输关键技术、资源管理和安全应用所需要的物联网通信和传输协议等进行了总结。此外,该综述总结了车联网面临的几个挑战,包括安全性差、可靠性差、标准不统一和智能化水平低。最后,作者对强化学习算法、GNN和5G通信等最新技术在智能交通系统中的应用进行了展望。

论文地址:https://dl.acm.org/doi/10.1145/3451984
—1— 简介
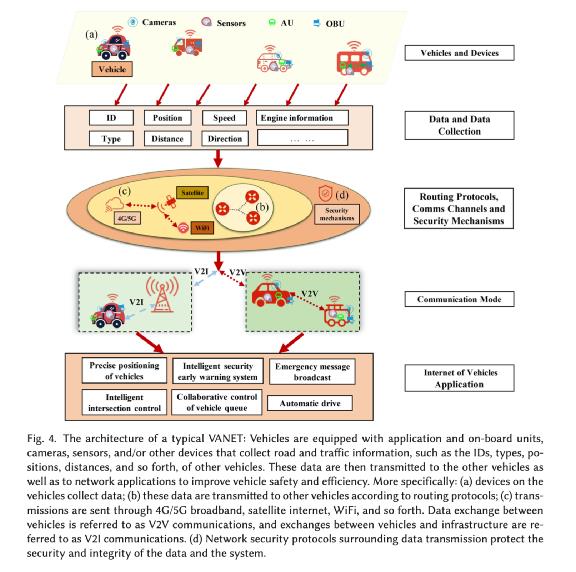
车联网可以实现提高城市交通通行效率,减少交通事故的发生以及降低能源消耗的目标。如图4所示,我们展示了车联网的主要组成部分,它包括车辆信息收集、数据传输、路由协议、安全机制以及实现的应用或服务。这些应用、车载单元和路边单元通常由GPS、雷达、摄像头和传感器组成。它们收集道路和交通信息,如其它车辆的ID、类型、位置、距离等等。这些数据然后被传送到其它车辆以及网络应用去提高车辆的安全性和效率。更具体地说。(a)车辆上的设备收集数据;(b)根据采用的路由协议将这些数据传输给其它车辆;(c)通过4G/5G网络、互联网、WiFi等完成传输任务。车辆之间的数据交换被称为V2V通信,而车辆和基础设施之间的交换被重新称为V2I通信。(d) 围绕数据传输的网络安全协议保护数据和系统的安全性和完整性。
—2— 车联网的关键组成部分
2.1 信息收集单元
车联网需要通过车载GPS、摄像头、雷达、传感器等硬件设备获取车辆状态信息,将硬件设备和通信设备相结合形成AU、OBU、RSU等组件,组件与车辆建立通信连接形成完整的车联网体系结构,它们是车联网应用的核心。车载GPS通常用于车辆定位,通过接收GPS卫星发送过来的数据,解读出短信报文,在电子地图上显示出车辆三维位置、方向、运动速度和运动时间等方面的相关数据。车载雷达作为探测目标、目标距离和速度的设备,利用发射光束之后,遇到障碍物返回的光束在雷达内部接收器中进行分析,通过折返时间和测量信号在处理器中进行处理,生成高精度的地图,实现对周围环境特征的还原,可在车辆中用于障碍物发现、碰撞预测、自适应巡航控制、倒车辅助等。传感器作为获取准确可靠信息的重要途径,在车联网技术发展中具有突出的地位。车用传感器能够收集车辆速度、距离、压力、温度、发动机运转情况等信息,为驾驶员提供车辆状况信息,是车联网获取信息的重要来源。
2.2 无线接入技术
在当前的车联网中,许多无线接入技术用来为车辆提供V2I、V2V和D2D通信所需的无线接口。如图6所示,不同类型的无线接入技术包括移动网络接入、车辆网络接入和短程通信,而移动网络接入包括:蜂窝网络、卫星网络、WiMAX。车辆接入网络包括:DSRC(专用短程通信)和CALM。短距离通信网络包括:WiFi、蓝牙和ZigBee。其中,蜂窝网络、WiFi和WiMAX依赖于集中的基础设施来协调节点之间的通信,而蓝牙、Zigbee和DSRC使用分布式协调模式进行通信。
2.3 路由协议
由于车联网中的车辆是高速移动的物体 ,这就意味着车联网的拓扑结构频繁而迅速地变化,因此整个网络的通信和数据交换是非常的不稳定。因此,确保车辆之间可靠、实时通信的方法一直是许多研究的重点。在这些解决方案中,有效的路由协议是提高车联网数据传输速度和可靠性的一个关键因素。
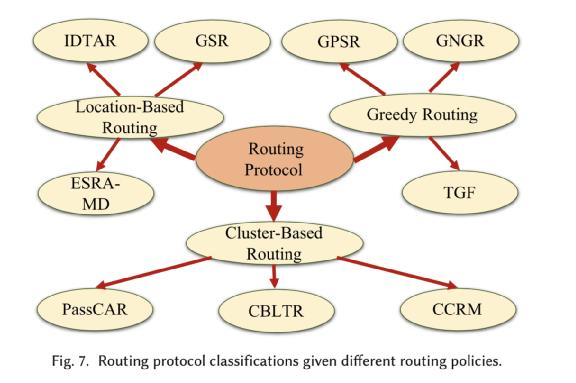
基于策略的路由协议包括基于位置的路由协议、基于贪婪策略的路由协议以及基于聚类的路由协议,如图7所示。基于位置的路由协议使用车辆配备的GPS和定位机制去确定车辆在地图上的位置,然后利用位置信息来选择合适的车辆进行数据转发,实现提高数据转发稳定性和降低转发时延的目的。基于簇的路由协议是根据节点度、生命周期、节点间距离等将网络节点形成簇,利用簇的分区和分层特点进行数据的转发来提高网络拓扑结构的吞吐量和稳定性。基于贪婪算法的路由协议是从源节点出发根据距离长短、时延大小、地理位置等信息构建出一个最佳路由路径,从而得到整体的最优解。
—3— 车联网应用
车联网的重要目标是通过车联网应用去提高交通的通行效率和确保驾驶安全,因此,该综述总结了车联网与人工智能结合的面向效率的应用和面向安全的应用。
3.1 面向效率的应用
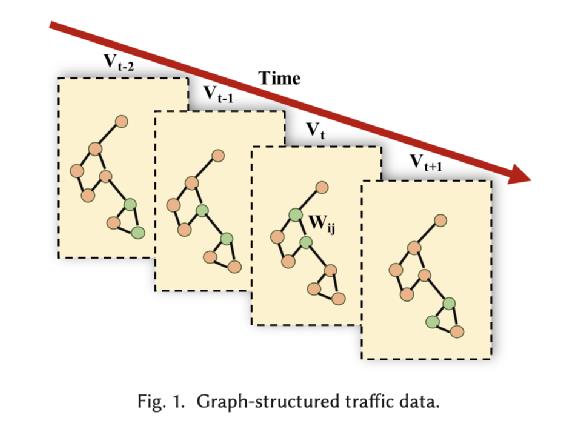
面向效率的应用包括交通预测和资源调度,及时准确的交通预测对于提高车辆通行效率至关重要,因为它能够为司机和路线规划者提供准确的导航、调度和流量控制,而这正是智能交通系统的基础。交通预测通常是指在速度、数量、密度等方面预测未来的交通流。预测可以是短期的(5-30分钟)或中长期的(超过30分钟)。由于交通预测和资源调度是非常复杂的任务,它们使用的数据大多数都是图结构的数据,如图1所示,在交通流中的数据Vt可以是一个有向图或无向图,这些图可以有权重也可以没有权重,可以被分成若干帧,而每一帧显示了在某一个时间步t的交通状况,因此传统的机器学习方法往往不能提取正确或足够的空间和时间特征来支持预测。图神经网络(GNN)作为一种处理复杂的非线性数据结构的重要技术,能够用来提高车辆的效率。现今,GNN已经被广泛用于交通预测、资源调度、资源分配效率、减少浪费和能源消耗等问题。本文总结了常见的用于提高效率的算法包括:DCRNN 、STGCN 、DMVST-Net 等。
3.2 面向安全的应用
随着车辆数目的快速增加,公众对驾驶安全的关注也在增加。因此,一些物联网相关的传感器设备被开发出来,通过将收集的数据与SVM、LSTM等人工智能技术相结合去分析司机操作车辆的方式,从而解决不安全的驾驶行为。除此之外,面向安全的应用还包括车辆准确定位系统、智能交叉路口管理系统、合作式自适应巡航控制系统、车辆早期安全预警系统以及紧急消息广播系统等。
3.2.1 车辆准确定位系统
车辆准确定位系统可以实时获取车辆位置,将车辆轨迹反应到电子地图上,实时监视道路上的车辆流向、流量、流速、密度等交通信息,然而,常用的GPS定位存在定位盲区、信号不稳定、精度差等缺点,需要通过激光探测、雷达探测、车辆间协作以及人工智能技术等提高车辆定位精度,更好的为城市智能交通服务。为此,研究者们提出了将路边车辆单元、全球导航卫星系统、轮速传感器、车载雷达、车载摄像头以及卷积神经网络应用到车辆位置的精确定位当中。
3.2.2 智能交叉路口管理系统
基于车联网的智能交叉路口管理系统可以不需要交通信号灯,利用激光扫描技术、雷达技术、摄像机技术等实现智能交叉路口的控制,解决交叉路口交通拥堵排队问题,减少交通事故的发生。该系统主要将车联网技术与机器学习相结合,利用V2I和V2V通信来交换车辆ID、车辆速度、车辆位置等车辆的运动状态信息,部署在交叉路口的控制器根据车辆运动信息利用神经网络分组机制将相同车道上的车辆分成组,通过无线网络来调度车辆以组为单位通过十字路口,这种调度可以减少等待时间和提高车辆通行的公平性,提高十字路口的通行效率,减少交通拥堵的发生,是当前解决城市拥堵问题的重要方式之一。
3.2.3 合作式自适应巡航控制系统
合作式自适应巡航控制系统的目的是将道路上无序的车辆进行编队组合成一个整体进行控制,从而简化交通控制对象、增强车辆行驶的效率和安全性,该系统利用车辆上的雷达和摄像头等技术通过V2V通信方式来交换车辆速度、加速度和车间距等信息,实现车辆队列保持恒定的距离和相同的速度,从而保证整个车辆队列作为一个整体来控制,提高道路的通行能力、通行效率和车辆安全性。
3.2.4 车辆早期安全预警系统
传统的车辆早期安全预警系统主要针对车辆和乘客提供安全服务,按照不同用途来划分,可将安全应用分为预防式安全应用、主动式安全应用和被动式安全应用。预防式安全应用指可以预测车辆可能发生的紧急事件下去采取主动行为来避免事故的发生,如碰撞避免系统、换道警告系统、超速警告系统等。主动式安全应用指通过监测车辆和驾驶人状态来帮助驾驶人避免事故的发生,如制动防抱死系统(ABS)、电子稳定控制系统(ESP)、制动辅助系统(BA)、驾驶人监测等。被动式安全应用指在车辆发生事故时能够帮助驾驶人和乘客生存,防止受伤,如安全气囊、安全带等。
基于车联网的智能车辆早期安全预警系统,通过车辆间的信息交换来创建自动化的任务,从而增强车辆和人们的安全,降低交通事故的发生概率。基于车联网的自动化任务,除了需要V2V通信之外,还需要激光、雷达、摄像头和光感应器等传感器,利用车辆通信,提供合作式车辆自适应巡航、车道变换辅助、合流辅助、减少眩光、预碰撞感知等合作式功能。而且,基于人工智能的安全预警系统还可以在预测车辆紧急态势时采取适当的决策去协作驾驶人采取措施来减少事故的发生,也可以在紧急状况,驾驶人没有采取措施的情况下,车辆自主决策采取措施来避免事故的发生。
3.2.5 紧急消息广播系统
紧急消息广播系统能够为不利驾驶和道路条件的紧急事件留出足够的反应时间是安全类应用的基础,通过将危险的紧急事件快速和可靠的广播到附近车辆,使附近车辆有充足的时间采取有效措施来避免交通事故的发生是紧急消息广播的主要任务。为了减少消息碰撞,依据广播重传策略不同,可以将紧急消息广播分为三类:1)基于概率的广播机制,这种重传机制通过预先定义的概率计算,给予每辆车分配一个重传概率,比如,可以将远离转发节点的车辆设置较高重传概率,实现对高概率车辆的消息重传。2)基于距离的广播机制,将距离中继节点较远的车辆设置较高的优先权进行消息转发,降低消息碰撞发生的概率。3)基于计数器的广播机制,只有当节点收到的消息数目小于预先设置的阈值时,才进行消息转发。随着5G通信网络的快速发展,也可以利用5G网络数据传输更快、时延更低等优势来提高紧急消息广播的及时性和可靠性,为紧急消息广播提供一种新途径。
—4—未来研究方向
本文总结了智能车联网技术面临的机遇与挑战,分析了该领域的问题并建议了4个未来研究方向:
提高车联网的安全性免受网络攻击
制定统一的标准便于数据的收集和传输
提高车联网的稳定性
提高车联网的智能化水平
---------♥---------
声明:本内容来源网络,版权属于原作者
图片来源网络,不代表本公众号立场。如有侵权,联系删除
AI博士私人微信,还有少量空位


点个在看支持一下吧

以上是关于最新「智能车联网」综述论文,170篇文献全面概述智能车联网技术的主要内容,如果未能解决你的问题,请参考以下文章