智能视觉食用指南
Posted Debroon
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了智能视觉食用指南相关的知识,希望对你有一定的参考价值。
卷积神经网络
在《深度学习食用指南》里,我们做了一个神经网络,在理论上,这个方法可以用来学习识别一切图像。
你只要把一张张的图片喂给神经网络,告诉它图上有什么,它终将自己发现各个东西的像素规律……但是在实践上,这个方法非常不可行。
比如在《深度学习食用指南》里,一张 64*64 的彩色图片就要用 1 万个数来描述,如果想让反向传播神经网络识别这样的图,那第一层每一个神经元都得有 1 万个权重w。
神经网络中的参数越多,所需要的训练素材就越多,否则就会过拟合。并不是任何照片都能用作训练素材,你必须事先靠人工标记照片上都有什么东西作为标准答案,才能给神经网络提供有效反馈。这么多训练素材上哪找呢?
即使你有海量的数据,可同时计算海量的参数,对算力的要求也非常高。
后来有人提出了卷积神经网络,其实就是借鉴人识别物品的方法。
人脑并不是每次都把一张图中所有的像素都放在一起考虑。
我们是:
-
看什么:让你找猫,你会先大概想象一下猫是什么样子,当你想象猫的时候,虽然不能完全说清,但你毕竟还是按照一定的规律去找。比如猫身上有毛,它有两个眼睛和一条尾巴,等等。
-
往哪看:也许猫在一个角落里,那你只要一个角落一个角落找就行,你没必要同时考虑图片的左上角和右下角。
总之,你看的不是单个的像素点,你看的是一片一片的像素群的模式变化。
实现这个思想,只是在最基本的像素到最终识别的物体之间加入了几个逻辑层 —— 也就是 “卷积层”。
“卷积” 是一种数学操作,可以理解成 “过滤”,或者叫 “滤波”,意思是从细致的信号中识别尺度更大一点的结构。
每一个卷积层识别一种特定规模的图形模式,后面一层只要在前面一层的基础上进行识别,这就解决了 “看什么” 和 “往哪看” 的问题。

第一层,是先从像素点中识别一些小尺度的线条结构,像垂直条纹、水平条纹、斑点、颜色从亮到暗等等各种小结构。
第二层,是根据第一层识别出来的小尺度结构识别像眼睛、耳朵、嘴之类的局部器官。
第三层,才是根据这些局部器官识别人脸。
其中每一层的神经网络从前面一层获得输入,经过深度学习之后再输出到后面一层,从小结构上看出更大、更复杂也更多的结构来,点 -> 线 -> 面。
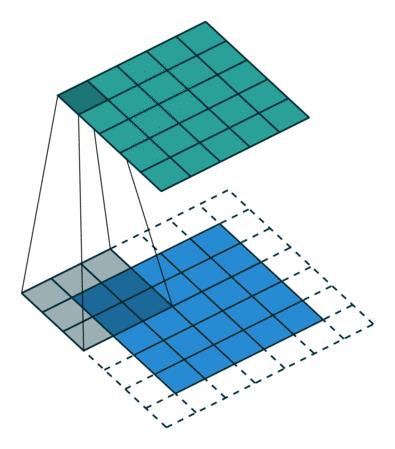
卷积运算
矩阵卷积(二维):矩阵 B B B 以某个步长在 矩阵 A A A 表面 滑动加权求和。
演示一下卷积过程,
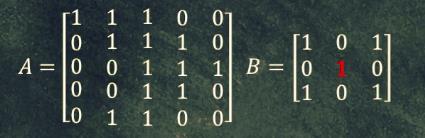
接着矩阵 B B B 从矩阵 A A A 的 左上角 准备滑动,如下图:
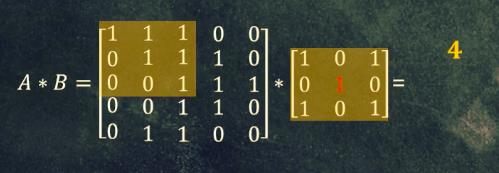
黄色区域的元素相乘,得到
4
4
4 个
1
1
1,相加值为
4
4
4。
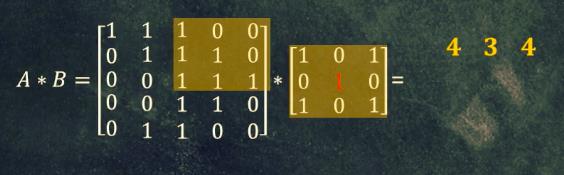
假设设定的滑动步长为 1 1 1 ,开始滑动,新一轮计算,方法相同,如下图:

继续滑动,对应位置相乘再求和得到
4
4
4,如下图:
继续滑动,对应位置相乘再求和得到 2,如下图:
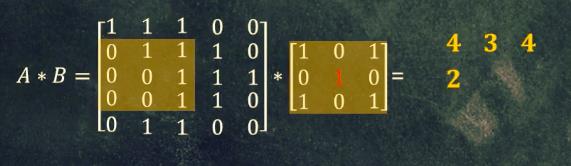
…,最终矩阵卷积生成的矩阵,对比 矩阵
A
A
A 生成的矩阵小了一圈,如下图:

矩阵
B
B
B (小矩阵),也被称为“卷积核”、“滤波器”;矩阵卷积(内积)也是卷积神经网络的原理。
- 结果矩阵维度:图像矩阵维度 ( n , n ) (n,n) (n,n),过滤器维度 ( f , f ) (f,f) (f,f),那结果矩阵 ( n − f + 1 , n − f + 1 ) (n-f+1,~n-f+1) (n−f+1, n−f+1) 。
边缘检测
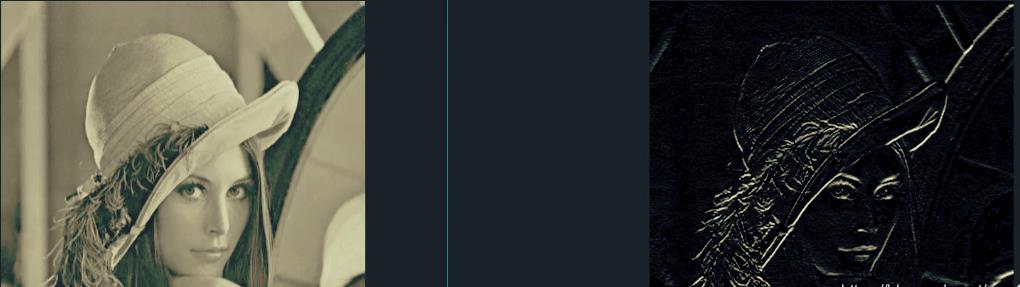
如果检查的是垂直条纹,那滤波器如下:
sobel = np.array([[ 1, 0, -1 ],
[ 2, 0, -2 ],
[ 1, 2, -1 ]])
如果检查的是水平条纹,那滤波器如下:
sobel = np.array([[ -1, -2, -1 ],
[ 0, 0, 0 ],
[ 1, 2, 1 ]])
更好的是,通过训练神经网络来找到更好的滤波器:
sobel = np.array([[ w1, w2, w3 ],
[ w4, w5, w6 ],
[ w7, w8, w9 ]])
其实我们检测一张图片,除了垂直条纹、水平条纹,还有 55 度角边缘、70 度角边缘······
一个滤波器负责一个子任务,那识别起来就是要多个滤波器啦。
过滤器越多,学到的特征越多。因为每个过滤器是不同的,所以他们会学到不同的特征。
我们可让输入图像同时与多个滤波器进行卷积运算。
比如下图同时和俩个滤波器进行卷积运算。

输入图像与每个滤波器进行卷积运算,都会生成一个相同维度的矩阵,而后我们可以把这俩个矩阵合并成一个二维的矩阵。
- 多滤波器的结果矩阵维度:图像矩阵维度
(
n
,
n
)
(n,n)
(n,n),过滤器维度
(
f
,
f
)
(f,f)
(f,f),那结果矩阵
(
n
−
f
+
1
,
n
−
f
+
1
)
∗
m
(n-f+1, ~n-f+1)*m
(n−f+1, n−f+1)∗m
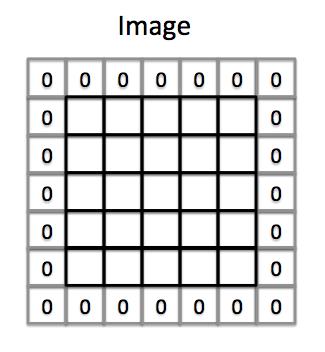
填补 padding
不得不说,卷积运算有俩个特点:
- 原数据变小了,比如矩阵是 5x5,滤波器 3x3,一波卷积变成了 3x3,也就是说,一张图片突然缩小了 2 5 \\frac{2}{5} 52,我们更想保护数据。
- 矩阵里越是外围的元素,使用次数就越小,越是靠近中心,使用次数就越多,我们需要均衡一下。
所以,在卷积运算之前我们会进行填补。在原数据的矩阵中的最边缘,再加一条边。
- padding 前的结果矩阵维度:图像矩阵维度 ( n , n ) (n,n) (n,n),过滤器维度 ( f , f ) (f,f) (f,f),那结果矩阵 ( n − f + 1 , n − f + 1 ) (n-f+1, ~n-f+1) (n−f+1, n−f+1) 。
- padding 后的结果矩阵维度:图像矩阵维度 ( n , n ) (n,n) (n,n),过滤器维度 ( f , f ) (f,f) (f,f),那结果矩阵 ( n + 2 p − f + 1 , n + 2 p − f + 1 ) (n+2p-f+1, ~n+2p-f+1) (n+2p−f+1, n+2p−f+1),因为我们只加了一条边,所以 p = 1 p=1 p=1,这样卷积后原矩阵大小不变。
如果不用 padding 的话,图像周边的信息可能就会丢失了,原来边缘的元素,现在也可以参与运算多次了。
卷积步长
上面卷积运算中,滤波器在原数据矩阵中只移动了一个位置,这时卷积步长为 1,我们也可以设置为 2 啦(前后左右走 2 个位置)。
其实,卷积核的步长度代表提取的精度:
- 步长越大,提取特征越少;
- 反之,提取特征越多。
比如,大小为 3 的卷积核,如果步长为1,那相邻步之间就会有重复区域;如果步长为2,那么相邻步不会重复,也不会有覆盖不到的地方;如果步长为3,那么相邻步之间会有一道大小为1的缝隙,从某种程度来说,这样就遗漏了原图的信息,直观上理解是不好的。
- 卷积步长的结果矩阵维度:图像矩阵维度 ( n , n ) (n,n) (n,n),过滤器维度 ( f , f ) (f,f) (f,f),那结果矩阵 ( n + 2 p − f s + 1 , n + 2 p − f s + 1 ) (\\frac{n+2p-f}{s}+1, ~\\frac{n+2p-f}{s}+1) (sn+2p−f+1, sn+2p−f+1), s s s为步长。
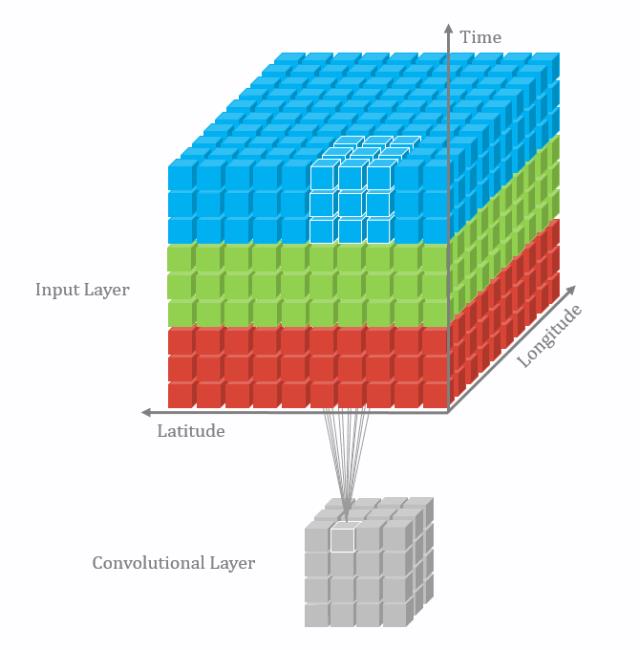
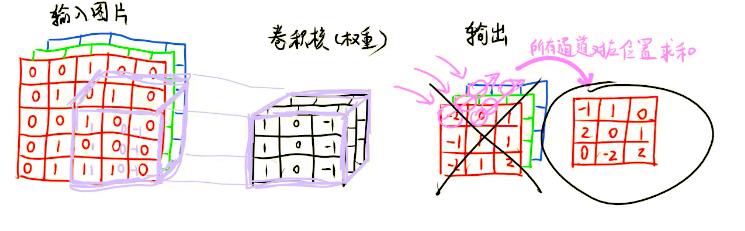
3D卷积
一张黑白的图片是二维,我们可以直接进行卷积运算,但一张彩色图片,要么先把彩色图片转为黑白图片(三维降到二维),要么把滤波器也上升到三维。
二维卷积:
三维卷积:
三类神经层
卷积层
前向传播计算:
- z [ 1 ] = w [ 1 ] a [ 0 ] + b [ 1 ] z^{[1]}=w^{[1]}a^{[0]}+b^{[1]} z[1]=w[1]a[0]+b[1]
- a [ 1 ] = f ( z [ 1 ] ) a^{[1]}=f(z^{[1]}) a[1]=f(z[1])
卷积层的前向传播计算:

如上图,卷积计算流程中加上阈值b和激活函数即可。
图中 6*6*3 的矩阵就是
a
0
a_{0}
a0 (第 0 层)。
3*3*3 的过滤器就相当于
w
[
1
]
w^{[1]}
w[1]。
俩者的 4*4 的矩阵加上b得到就是
z
[
1
]
z^{[1]}
z[1]。
z
[
1
]
z^{[1]}
z[1] 经过了激活函数,得到的俩个 4*4 的矩阵会叠成一个 4*4*2 的矩阵,这就是
a
[
1
]
a^{[1]}
a[1]。
这就是一个单独的卷积层:
- 输入
a
0
a_{0}
a0:
6*6*3 - 输出
a
[
1
]
a^{[1]}
a[1]:
4*4*2
单个卷积层再叠加成一个卷积神经网络。

池化层
池化层,可降低网络的计算量,提升稳定性。
全连接层
深度卷积网络
目标检测
人脸识别
风格迁移
以上是关于智能视觉食用指南的主要内容,如果未能解决你的问题,请参考以下文章