国产MCU移植移植RT-Thread到国产芯片FM33LC026
Posted RT-Thread物联网操作系统
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了国产MCU移植移植RT-Thread到国产芯片FM33LC026相关的知识,希望对你有一定的参考价值。
本文由RT-Thread论坛用户@jiao96 原创发布:https://club.rt-thread.org/ask/article/3020.html
摘要
因为项目需要,使用了复旦微FM33LC026单片机,移植了RT_Thread系统。正好赶上rt官方的【国产MCU移植】活动,顺路参与一下。
芯片参数:
| 硬件 | 描述 |
|---|---|
| CPU | Cortex-M0 |
| 主频 | 64MHz |
| SRAM | 24KB |
| Flash | 128KB |
移植主要步骤:
1.工程搭建
2.添加复旦微官方库
3.板级初始化
4.对接串口驱动
开发工具:
Keil5、Env工具、Scons
工程搭建
芯片为ARM Cortex M0内核,可以用M0内核的其它BSP修改一个出来。
因为平时使用STM32比较多,同时rt官方适配的较好,所以使用了stm32f072-st-nucleo进行修改。
将stm32f072-st-nucleo复制到bsp目录下,改名为fm33lc026。
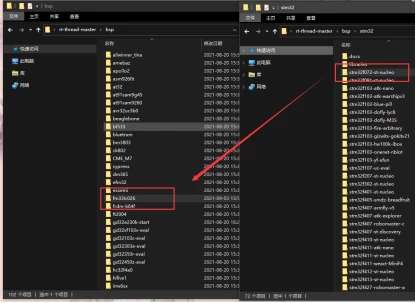
Stm32的libraries一起挪到新工程目录下。
只搞了keil5的工程,其它没用的删掉。
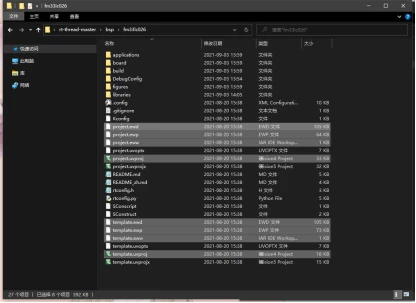
修改keil5工程。
项目工程是工具通过template模板生成的,所以,修改型号只需要修改template.uvprojx就可以了。
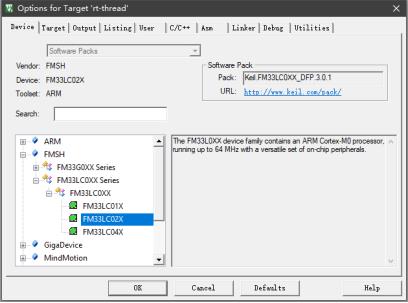
打开template.uvprojx
修改芯片型号为FM33LC02X,其余大部分会根据选择的芯片自动修改。
再进入linker,分散加载文件修改一下。

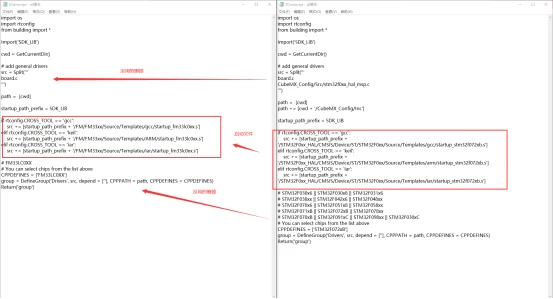
template模板修改完成,接下来需要用模板生成工程,由于工程是STM32拷贝出来的,一些相对路径等会有变化,脚本会有问题,先进行一下修改。
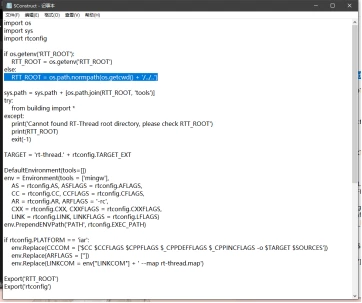
修改fm33lc026文件夹下SConstruct文件,文本文档打开,这里路径改为如图的路径。
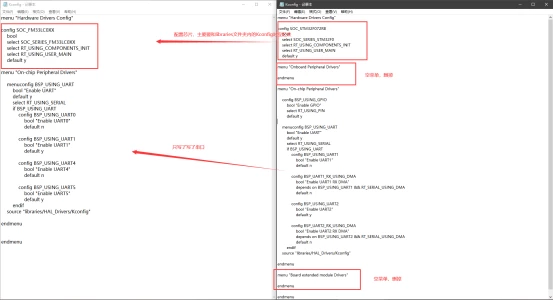
修改fm33lc026文件夹下Kconfig文件,修改如下。

修改好了,通过env工具,menuconfig,啊哈,报错了。
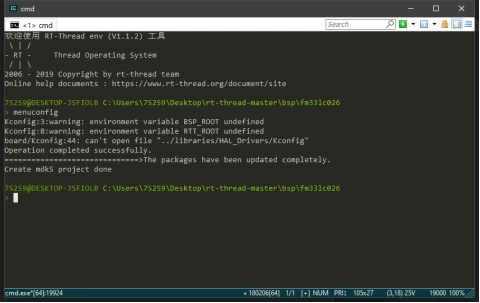
根据报错信息,还需要修改board/Kconfig下libraries的路径。
修改完成,menuconfig打开,现在还是原来工程的配置,接下来还需要继续修改,退出,生成一下keil5工程,打开工程,各配置正常,文件路径都可以找到,工程搭建完毕。

添加复旦微官方库
接下来,添加复旦微FM33LC0XX的官方库函数到路径下。
需要替换掉原本STM32的官方HAL库。
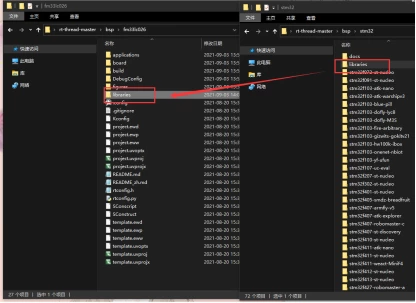
STM32的库函数和驱动文件都在\\libraries文件夹下,也就是刚才我们复制到工程内的文件夹。
我们只需要进入\\libraries文件夹下,把官方库函数文件夹添加进来,通过修改脚本,让它自己添加就OK了。
打开\\libraries文件夹,先看一下文件结构。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2OHYyQCx-1631071758745)(https://oss-club.rt-thread.org/uploads/20210906/8519e6c65f602919e1db3085ea23bb9e.png)]
把STM32的HAL库全部删掉,找到官方的FM33LC0xx_FL_Driver库,复制一份进来。同时FM33LC0XX内核相关文件也复制进来。新的目录结构如下,驱动文件留着,低层驱动需要套接到内核驱动层,在原本STM32的修改就可以了。

修改Kconfig
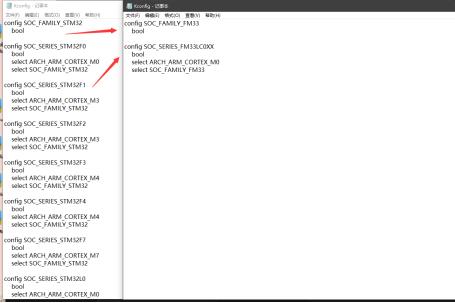
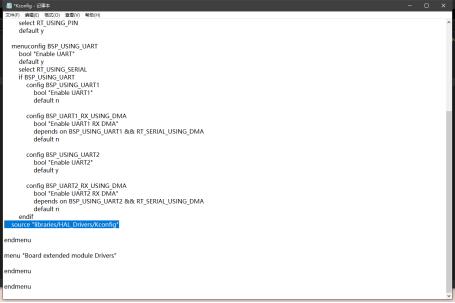
进入接下来的文件夹,继续修改Kconfig。
FM内的文件是board里Kconfig配置的,而且只用到了.s启动文件,下一节进行配置。
先进入FM33LC0xx_FL_Driver文件夹。
FM33LC0xx_FL_Driver对应STM32_HAL库,复制一份STM32_HAL的SConscript到FM33LC0xx_FL_Driver目录下,进行修改。
复制bsp\\stm32\\libraries\\STM32F0xx_HAL内的SConscript到FM33LC0xx_FL_Driver目录下。打开。
改为如下:

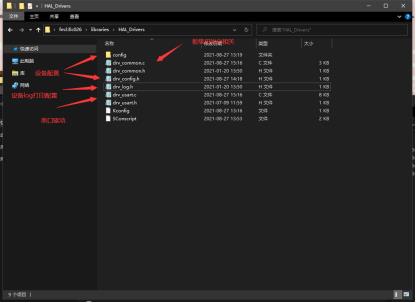
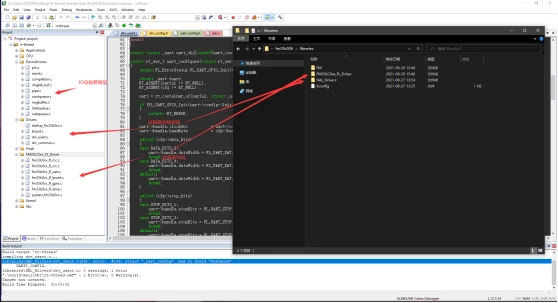
进入HAL_Drivers文件夹下。
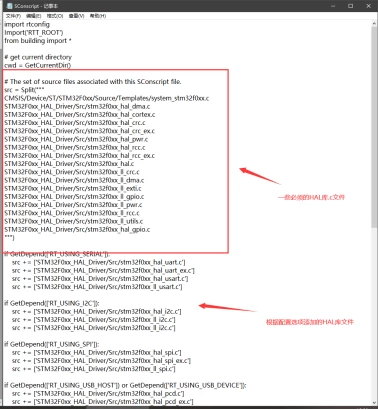
因为我只适配了串口驱动,删掉没用的文件。删完如下图。
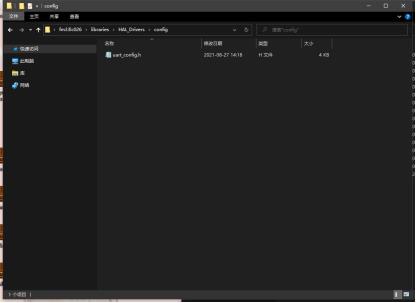
Config文件夹下
修改SConscript,都是根据宏定义添加drv_XXX.c到工程。
Emmmm,算了,不修改了,以后添加驱动还要加回来,顶多生成的工程找不到相应的drv_.c,基本没啥影响。
使用env生成一下工程,报错了,根据报错信息,找到报错的位置。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-xVZaPI6j-1631071758753)(https://oss-club.rt-thread.org/uploads/20210906/59fe7bafb1f4651fc924ba68a32cf7fd.png.webp)]
打开报错的文件,官方库路径在这一步修改过,需要重新修改。
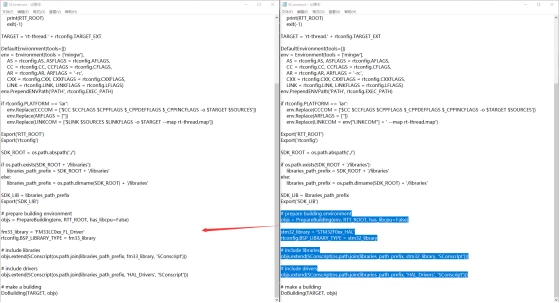
重新生成工程,成功,打开工程,库文件也添加成功。
板级初始化
相关库函数已经添加成功,接下来,要让单片机运行起来,并且进入系统。
启动流程可以看RT_Thread官方文档。这里借用一张图。

要修改的有,.s启动文件,rt_hw_board_init()函数内相关的内容。
添加完官方库文件后,打开keil5工程,会发现.s启动文件还是STM32F072的,这里,我们要修改一下。
打开board文件夹,打开SConscript,修改启动文件路径,修改如下。
还有一个Kconfig文件,和启动无关,顺路也修改一下。里面主要是menuconfig里单片机设备等的配置菜单,修改成我们需要的。
进入工程board文件夹,删掉STM32的CubeMX文件夹。
删掉linker_scripts分散加载文件(分散加载相关在最前面已经配置了,如果需要分散加载文件,推荐不删,把文件内容改成FM33LC0XX的即可)。
OK…
进入env,打开menuconfig,发现串口图形化配置已经OK了。
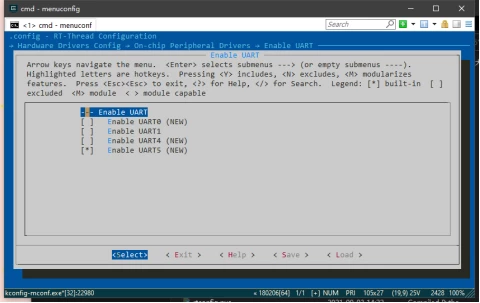
退出menuconfig,生成工程,打开工程,发现所有文件都添加完毕,接下来要修改代码了。
进行rt_hw_board_init()内相关的函数的修改。
直接上改好的吧,具体相关的自行查看源码,代码现已经合并到RT_Thread主分支。
打开drv_common.c,修改相关。
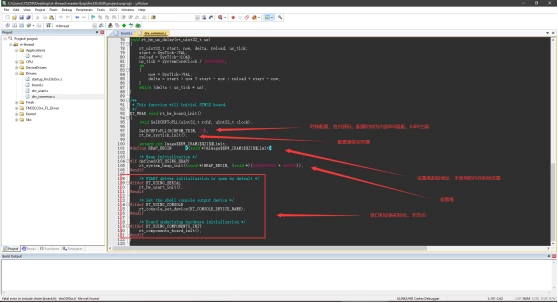
打开board.c

板级初始化这部分就完成了。工程这部分编译还是会报错,因为串口驱动相关的代码还是STM32的。关于驱动部分的对接,在接下来的部分。
对接串口驱动
关于设备,可以参考官方设备文档
继续引用一张图。
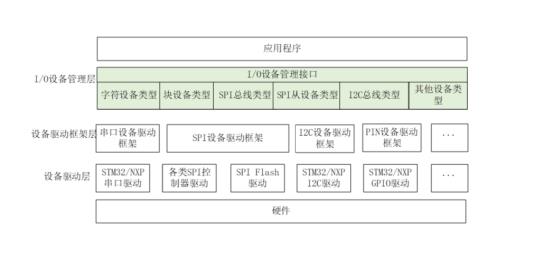
对应到工程:
简单来讲,就是写一个套接层,把官方的库函数套接到RT_Thread的设备管理层内。只需要修改设备驱动框架层,对应到工程就是keil5里Drivers里相关的代码。
打开Drivers分组,找到我们要修改的串口部分程序,分别为drv_usart.c,drv_usart.h,uart_config.h。同时,关于串口引脚的初始化,模仿STM32的bsp包,单独拿了出来,放到了board.c里。
首先是drv_usart.h文件,定义了串口配置结构体和串口设备结构体,删掉原来STM32的,修改成如下:
串口配置结构体,一些需要单独进行配置的部分单拉出来。
/* config class */
struct _uart_config
{
const char *name;
void *InitTypeDef;
IRQn_Type irq_type;
uint32_t clockSrc;
};
串口结构体,通用的,不需要修改的部分。
/* uart dirver class */
struct _uart
{
FL_UART_InitTypeDef handle;
struct _uart_config *config;
rt_uint16_t uart_dma_flag;
struct rt_serial_device serial;
};
drv_usart.c文件里,定义了串口实例,串口的操作方法函数,串口的注册函数。修改如下:
串口实例,根据rtconfig.h里的宏定义进行配置。
enum
{
#ifdef BSP_USING_UART0
UART0_INDEX,
#endif
#ifdef BSP_USING_UART1
UART1_INDEX,
#endif
#ifdef BSP_USING_UART4
UART4_INDEX,
#endif
#ifdef BSP_USING_UART5
UART5_INDEX,
#endif
#ifdef BSP_USING_LPUART0
LPUART0_INDEX,
#endif
#ifdef BSP_USING_LPUART1
LPUART1_INDEX,
#endif
};
static struct _uart_config uart_config[] =
{
#ifdef BSP_USING_UART0
UART0_CONFIG,
#endif
#ifdef BSP_USING_UART1
UART1_CONFIG,
#endif
#ifdef BSP_USING_UART4
UART4_CONFIG,
#endif
#ifdef BSP_USING_UART5
UART5_CONFIG,
#endif
#ifdef BSP_USING_LPUART0
LPUART0_CONFIG,
#endif
#ifdef BSP_USING_LPUART1
LPUART1_CONFIG,
#endif
};
串口的操作方法函数,这里不详细列出,需要把这几个结构体里函数修改完成。
static const struct rt_uart_ops _uart_ops =
{
.configure = uart_configure,
.control = uart_control,
.putc = uart_putc,
.getc = uart_getc,
.dma_transmit = 0
};
串口的注册函数,将串口设备注册到设备管理层。
int rt_hw_usart_init(void)
{
rt_size_t obj_num = sizeof(uart_obj) / sizeof(struct _uart);
struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT;
rt_err_t result = 0;
for (int i = 0; i < obj_num; i++)
{
/* init UART object */
uart_obj[i].config = &uart_config[i];
uart_obj[i].serial.ops = &_uart_ops;
uart_obj[i].serial.config = config;
/* register UART device */
result = rt_hw_serial_register(&uart_obj[i].serial, uart_obj[i].config->name,
RT_DEVICE_FLAG_RDWR
| RT_DEVICE_FLAG_INT_RX
| RT_DEVICE_FLAG_INT_TX
| uart_obj[i].uart_dma_flag
, NULL);
RT_ASSERT(result == RT_EOK);
}
return result;
}
uart_config.h文件,在drv_config.h里包含,给串口配置结构体赋值,需要填入对应的串口中断向量地址等:
#if defined(BSP_USING_UART0)
#ifndef UART0_CONFIG
#define UART0_CONFIG \\
{ \\
.name = "uart0", \\
.InitTypeDef = UART0, \\
.irq_type = UART0_IRQn, \\
.clockSrc = FL_RCC_UART0_CLK_SOURCE_APB1CLK, \\
}
#endif /* UART0_CONFIG */
#endif /* BSP_USING_UART0 */
#if defined(BSP_USING_UART1)
#ifndef UART1_CONFIG
#define UART1_CONFIG \\
{ \\
.name = "uart1", \\
.InitTypeDef = UART1, \\
.irq_type = UART1_IRQn, \\
.clockSrc = FL_RCC_UART1_CLK_SOURCE_APB1CLK, \\
}
#endif /* UART1_CONFIG */
#endif /* BSP_USING_UART1 */
board.c里放入了串口引脚初始化,和其他一些关于硬件底层的配置。
FL_ErrorStatus FL_UART_GPIO_Init(UART_Type *UARTx)
{
FL_ErrorStatus status = FL_FAIL;
FL_GPIO_InitTypeDef GPIO_InitStruct;
if (UARTx == UART0)
{
GPIO_InitStruct.pin = FL_GPIO_PIN_13;
GPIO_InitStruct.mode = FL_GPIO_MODE_DIGITAL;
GPIO_InitStruct.outputType = FL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.pull = FL_DISABLE;
GPIO_InitStruct.remapPin = FL_DISABLE;
status = FL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.pin = FL_GPIO_PIN_14;
GPIO_InitStruct.mode = FL_GPIO_MODE_DIGITAL;
GPIO_InitStruct.outputType = FL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.pull = FL_DISABLE;
GPIO_InitStruct.remapPin = FL_DISABLE;
status = FL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
else if (UARTx == UART1)
{
GPIO_InitStruct.pin = FL_GPIO_PIN_13;
GPIO_InitStruct.mode = FL_GPIO_MODE_DIGITAL;
GPIO_InitStruct.outputType = FL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.pull = FL_DISABLE;
GPIO_InitStruct.remapPin = FL_DISABLE;
status = FL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.pin = FL_GPIO_PIN_14;
GPIO_InitStruct.mode = FL_GPIO_MODE_DIGITAL;
GPIO_InitStruct.outputType = FL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.pull = FL_DISABLE;
GPIO_InitStruct.remapPin = FL_DISABLE;
status = FL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
else if (UARTx == UART4)
{
GPIO_InitStruct.pin = FL_GPIO_PIN_0;
GPIO_InitStruct.mode = FL_GPIO_MODE_DIGITAL;
GPIO_InitStruct.outputType = FL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.pull = FL_DISABLE;
GPIO_InitStruct.remapPin = FL_DISABLE;
status = FL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.pin = FL_GPIO_PIN_1;
GPIO_InitStruct.mode = FL_GPIO_MODE_DIGITAL;
GPIO_InitStruct.outputType = FL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.pull = FL_DISABLE;
GPIO_InitStruct.remapPin = FL_DISABLE;
status = FL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
return status;
}
修改完毕,配置好串口到控制台,编译下载,正常使用。
点灯
最后在main函数里点灯
int main(void)
{
FL_GPIO_InitTypeDef GPIO_InitStruct = {0};
FL_GPIO_SetOutputPin(GPIOD, FL_GPIO_PIN_4);
GPIO_InitStruct.pin = FL_GPIO_PIN_4;
GPIO_InitStruct.mode = FL_GPIO_MODE_OUTPUT;
GPIO_InitStruct.outputType = FL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.pull = FL_DISABLE;
FL_GPIO_Init(GPIOD, &GPIO_InitStruct);
while (1)
{
FL_GPIO_SetOutputPin(GPIOD, FL_GPIO_PIN_4);
rt_thread_mdelay(500);
FL_GPIO_ResetOutputPin(GPIOD, FL_GPIO_PIN_4);
rt_thread_mdelay(500);
}
}
完毕。
总结
没有总结,第一次写技术文档,欢迎大家学习交流。

近来芯片缺货大幕拉开,掀起新一轮国产替代浪潮。RT-Thread发起一场国产MCU移植贡献活动,邀请开发者们参加!
活动详情:国潮崛起!RT-Thread国产MCU移植贡献活动开启!
以上是关于国产MCU移植移植RT-Thread到国产芯片FM33LC026的主要内容,如果未能解决你的问题,请参考以下文章
国产MCU移植看看有没有你需要的,一起来查漏补缺吧!(附已报名的硬件)...