以OneFlow为例梳理深度学习框架的那些插值方法
Posted just_sort
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了以OneFlow为例梳理深度学习框架的那些插值方法相关的知识,希望对你有一定的参考价值。
0x0. 前言
这篇文章基于自己为OneFlow框架开发interpolate这个Op总结而来,OneFlow的interpolate Op 和 Pytorch的功能一致,都是用来实现插值上采样或者下采样的。在实现这个Op的时候还给Pytorch修复了一个bug并合并到了主仓库,见:https://github.com/pytorch/pytorch/commit/6ab3a210983b7eee417e7cd92a8ad2677065e470。因此OneFlow框架中的interpolate算子和Pytorch中的interpolate算子的功能是完全等价的。这篇文章就以OneFlow中这个算子的实现为例来盘点一下深度学习框架中的那些插值算法。
0x1. doc && interface接口
要了解interpolate算子中的插值算法,首先需要从文档和Python前端接口看起。看一下接口文档,https://oneflow.readthedocs.io/en/master/functional.html?highlight=interpolate 。
这里可以看到OneFlow的interpolate算子用来实现插值上采样或者下采样的功能,支持3-D,4-D,5-D的输入Tensor,然后提供了多种插值的方式应用于不同Shape的输入Tensor。下面再看一下参数列表:
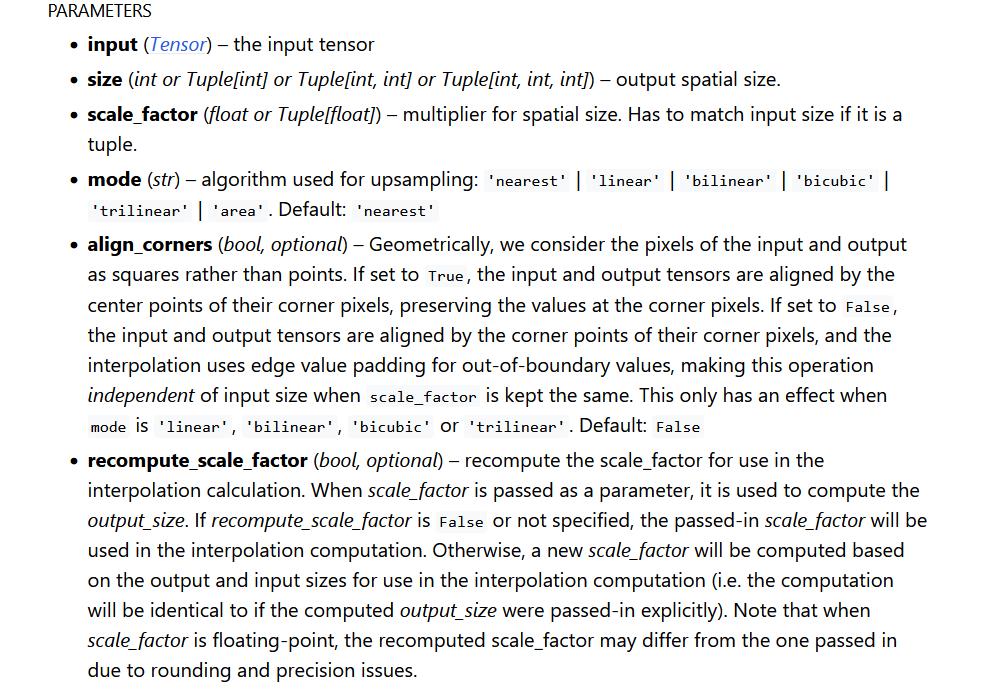
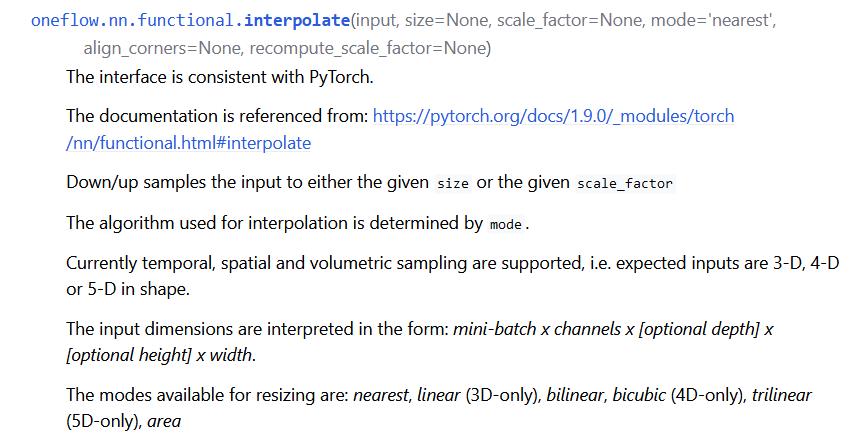
input:输入Tensor。size:插值后输出Tensor的空间维度的大小,这个spatial size就是去掉Batch,Channel,Depth维度后剩下的值。比如NCHW的spatial size是HW。scale_factor(float 或者 Tuple[float]):spatial size的乘数,如果是tuple则必须匹配输入数据的大小。mode(str):上采样的模式,包含’nearest’ | ‘linear’ | ‘bilinear’ | ‘bicubic’ | ‘trilinear’ | ‘area’。 默认是 ‘nearest’。align_corners(bool):在几何上,我们将输入和输出的像素视为正方形而不是点。 如果设置为True,则输入和输出张量按其角像素的中心点对齐,保留角像素处的值。 如果设置为False,则输入和输出张量按其角像素的角点对齐,插值使用边缘值填充来处理边界外值,当scale_factor保持不变时,此操作与输入大小无关。 这仅在mode为 ‘linear’ | ‘bilinear’ | ‘bicubic’ | 'trilinear’时有效。默认值是False。(没看懂没关系,下面有一节专门讲解)recompute_scale_factor(bool):重新计算用于插值计算的 scale_factor。 当 scale_factor 作为参数传递时,它用于计算 output_size。 如果 recompute_scale_factor 为False或未指定,则传入的 scale_factor 将用于插值计算。 否则,将根据用于插值计算的输出和输入大小计算新的 scale_factor(即,等价于显示传入output_size)。 请注意,当 scale_factor 是浮点数时,由于舍入和精度问题,重新计算的 scale_factor 可能与传入的不同。
除了功能描述和参数描述之外还有几个注意事项和warning,大家可以自行查看文档。下面贴一段如何使用的示例代码,非常简单。
>>> import oneflow as flow
>>> import numpy as np
>>> input = flow.Tensor(np.arange(1, 5).reshape((1, 1, 4)), dtype=flow.float32)
>>> output = flow.nn.functional.interpolate(input, scale_factor=2.0, mode="linear")
>>> output
tensor([[[1.0000, 1.2500, 1.7500, 2.2500, 2.7500, 3.2500, 3.7500, 4.0000]]],
dtype=oneflow.float32)
介绍完文档之后,我们看一下这个Op实现的Python前端接口,代码见:https://github.com/Oneflow-Inc/oneflow/blob/master/python/oneflow/nn/modules/interpolate.py#L25-L193 。这里的主要逻辑就是在根据是否传入了recompute_scale_factor参数来重新计算scale_factor的值,在获得了scale_factor之后根据传入的mode调用不同的插值Kernel的实现。见:
if len(x.shape) == 3 and self.mode == "nearest":
return flow._C.upsample_nearest_1d(
x, scale_factor=scale_factors[0], data_format="channels_first"
)
if len(x.shape) == 4 and self.mode == "nearest":
return flow._C.upsample_nearest_2d(
x,
height_scale=scale_factors[0],
width_scale=scale_factors[1],
data_format="channels_first",
)
if len(x.shape) == 5 and self.mode == "nearest":
return flow._C.upsample_nearest_3d(
x,
depth_scale=scale_factors[0],
height_scale=scale_factors[1],
width_scale=scale_factors[2],
data_format="channels_first",
)
if len(x.shape) == 3 and self.mode == "area":
assert output_size is not None
return flow._C.adaptive_avg_pool1d(x, output_size)
if len(x.shape) == 4 and self.mode == "area":
assert output_size is not None
return flow._C.adaptive_avg_pool2d(x, output_size)
if len(x.shape) == 5 and self.mode == "area":
assert output_size is not None
return flow._C.adaptive_avg_pool3d(x, output_size)
if len(x.shape) == 3 and self.mode == "linear":
assert self.align_corners is not None
return flow._C.upsample_linear_1d(
x,
scale_factor=scale_factors[0],
align_corners=self.align_corners,
data_format="channels_first",
)
if len(x.shape) == 4 and self.mode == "bilinear":
assert self.align_corners is not None
return flow._C.upsample_bilinear_2d(
x,
height_scale=scale_factors[0],
width_scale=scale_factors[1],
align_corners=self.align_corners,
data_format="channels_first",
)
if len(x.shape) == 4 and self.mode == "bicubic":
assert self.align_corners is not None
return flow._C.upsample_bicubic_2d(
x,
height_scale=scale_factors[0],
width_scale=scale_factors[1],
align_corners=self.align_corners,
data_format="channels_first",
)
if len(x.shape) == 5 and self.mode == "trilinear":
assert self.align_corners is not None
return flow._C.upsample_trilinear_3d(
x,
depth_scale=scale_factors[0],
height_scale=scale_factors[1],
width_scale=scale_factors[2],
align_corners=self.align_corners,
data_format="channels_first",
)
所以Python前端就是处理了一些参数关系,然后调用了C++层的API来完成真正的计算过程。下面我们将分别介绍各种插值算法的原理以及在OneFlow中的实现。
0x2. AlignCorners解释
在上面的接口中,align_corners是一个非常重要的参数,这里我们先解释一下这个参数是什么含义再继续讲解每种Kernel的实现。这里以一张图片的nearest插值为例讲解align_corners的具体含义。
假设原始图像的大小是
m
×
n
m\\times n
m×n,目标图像是
a
×
b
a\\times b
a×b,那么两幅图像的边长比分别是
m
/
a
m/a
m/a和
n
/
b
n/b
n/b。那么目标图像的
(
i
,
j
)
(i,j)
(i,j)位置的像素可以通过上面的边长比对应回原图像,坐标为
(
i
∗
m
/
a
,
j
∗
n
/
b
)
(i*m/a,j*n/b)
(i∗m/a,j∗n/b)。当然这样获得的坐标可能不是整数,如果强行取整就是普通的最邻近插值,而双线性插值就是通过寻找距离这个对应坐标最近的四个像素点,来计算该点的值,如果坐标是
(
2.5
,
4.5
)
(2.5,4.5)
(2.5,4.5),那么最近的四个像素是
(
2
,
4
)
,
(
2
,
5
)
(2,4),(2,5)
(2,4),(2,5),
(
3
,
4
)
(3,4)
(3,4),
(
3
,
5
)
(3,5)
(3,5)。如果图形是灰度图,那么
(
i
,
j
)
(i,j)
(i,j)点的像素值可以通过下面的公式计算:
f
(
i
,
j
)
=
w
1
∗
p
1
+
w
2
∗
p
2
+
w
3
∗
p
3
+
w
4
∗
p
4
f(i, j)=w1*p1+w2*p2+w3*p3+w4*p4
f(i,j)=w1∗p1+w2∗p2+w3∗p3+w4∗p4
其中,
p
i
=
(
1
,
2
,
3
,
4
)
pi=(1,2,3,4)
pi=(1,2,3,4)为最近的
4
4
4个像素点,
w
i
w_i
wi为各点的权重。
到这里并没有结束,我们需要特别注意的是,仅仅按照上面得到公式实现的双线性插值的结果和OpenCV/Matlab的结果是对应不起来的,这是为什么呢?
原因就是因为坐标系的选取问题,按照一些网上的公开实现,将源图像和目标图像的原点均选在左上角,然后根据插值公式计算目标图像每个点的像素,假设我们要将 5 × 5 5\\times 5 5×5的图像缩小成 3 × 3 3\\times 3 3×3,那么源图像和目标图像的对应关系如下图所示:
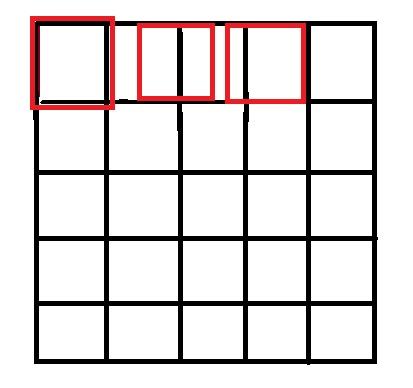
可以看到如果选择了左上角作为原点,那么最右边和最下边的像素是没有参与计算的,所以我们得到的结果和OpenCV/MatLab中的结果不会一致,那应该怎么做才是对的呢?
答案就是让两个图像的几何中心重合,并且目标图像的每个像素之间都是等间隔的,并且都和两边有一定的边距。如下图所示:
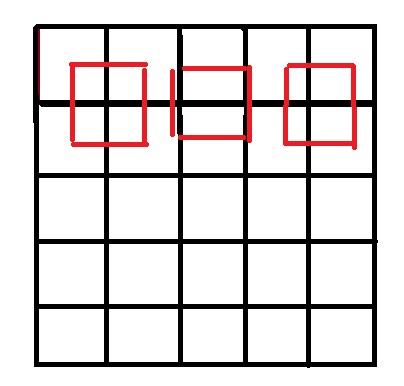
所以,我们只需要在计算坐标的时候将:
int x=i*m/a;
int y=j*n/b;
改成:
int x=(i+0.5)*m/a-0.5;
int y=(j+0.5)*n/b-0.5;
所以在interpolate Op的实现中提供了align_corners这个参数让用户选择是否对齐输入和输出的几何中心。
0x3. Linear插值
Linaer插值即线性插值。线性插值的几何意义即为概述图中利用过A点和B点的直线来近似表示原函数。如下图所示:
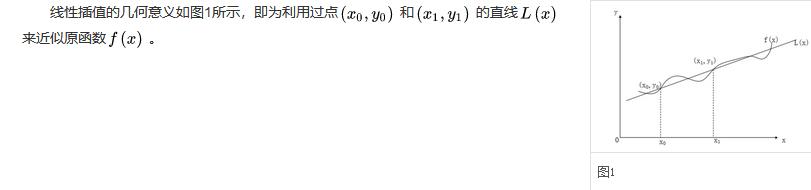
由于
(
y
−
y
0
)
/
(
x
−
x
0
)
=
(
y
1
−
y
0
)
/
(
x
1
−
x
0
)
(y-y_0)/(x-x_0)=(y_1-y_0)/(x_1-x_0)
(y−y0)/(x−x0)=(y1−y0)/(x1−x0),
那么
(
x
−
x
0
)
/
(
x
1
−
x
0
)
=
(
y
−
y
0
)
/
(
y
1
−
y
0
)
=
k
(x-x_0)/(x_1-x_0)=(y-y_0)/(y_1-y_0)=k
(x−x0)/(x1−x0)=(y−y0)/(y1−y0)=k
再展开一下可得:
y
=
(
1
−
k
)
∗
y
0
+
k
∗
y
1
y=(1-k)*y_0+k*y_1
y=(1−k)∗y0+k∗y1
在OneFlow中实现线性插值的代码在https://github.com/Oneflow-Inc/oneflow/blob/master/oneflow/user/kernels/upsample_linear_1d_kernel.cpp,我们只看前向,代码中的h1lambda就对应了这个公式里面的
k
k
k。
template<typename T>
OF_DEVICE_FUNC T GetLinearInputIndex(const int64_t out_dim_idx, const T scale, bool align_corners) {
if (align_corners) {
return static_cast<T>(scale * out_dim_idx);
} else {
T src_idx = scale * (out_dim_idx + 0.5) - 0.5;
return static_cast<T>(src_idx < 0 ? 0 : src_idx);
}
}
static void UpsampleLinear1DForward(const int64_t elem_cnt, const T* in_dptr,
NdIndexOffsetHelper<int64_t, 3> in_helper,
NdIndexOffsetHelper<int64_t, 3> out_helper, const int in_height,
const float scale_factor, 以上是关于以OneFlow为例梳理深度学习框架的那些插值方法的主要内容,如果未能解决你的问题,请参考以下文章