PCL:RANSAC 空间直线拟合
Posted 没事就要敲代码
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PCL:RANSAC 空间直线拟合相关的知识,希望对你有一定的参考价值。
1 SACMODEL_LINE 模型
空间直线模型,每次采样2个点,返回6个最优模型系数
| 系数 | 意义 |
|---|---|
| coefficient[0] | 直线上一点的 x 坐标 |
| coefficient[1] | 直线上一点的 y 坐标 |
| coefficient[2] | 直线上一点的 z 坐标 |
| coefficient[3] | 直线方向向量的 x 分量 |
| coefficient[4] | 直线方向向量的 y 分量 |
| coefficient[5] | 直线方向向量的 z 分量 |
2 实现代码
代码:
#include <pcl/io/pcd_io.h>
#include <pcl/sample_consensus/ransac.h>
#include <pcl/sample_consensus/sac_model_line.h>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std;
int main()
{
//------------------------------- 加载点云 -------------------------------
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile("straightLine.pcd", *cloud) < 0)
{
PCL_ERROR("\\a点云文件不存在!\\n");
system("pause");
return -1;
}
cout << "->加载点云个数:" << cloud->points.size() << endl;
//========================================================================
//----------------------------- 空间直线拟合 -----------------------------
pcl::SampleConsensusModelLine<pcl::PointXYZ>::Ptr model_line(new pcl::SampleConsensusModelLine<pcl::PointXYZ>(cloud)); //指定拟合点云与几何模型
pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_line); //创建随机采样一致性对象
ransac.setDistanceThreshold(0.01); //内点到模型的最大距离
ransac.setMaxIterations(1000); //最大迭代次数
ransac.computeModel(); //执行RANSAC空间直线拟合
vector<int> inliers; //存储内点索引的向量
ransac.getInliers(inliers); //提取内点对应的索引
/// 根据索引提取内点
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_line(new pcl::PointCloud<pcl::PointXYZ>);
pcl::copyPointCloud<pcl::PointXYZ>(*cloud, inliers, *cloud_line);
/// 模型参数
Eigen::VectorXf coefficient;
ransac.getModelCoefficients(coefficient);
cout << "直线点向式方程为:\\n"
<< " (x - " << coefficient[0] << ") / " << coefficient[3]
<< " = (y - " << coefficient[1] << ") / " << coefficient[4]
<< " = (z - " << coefficient[2] << ") / " << coefficient[5];
//========================================================================
//---------------------------- 可视化(可选) -----------------------------
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("拟合结果"));
viewer->setBackgroundColor(1, 1, 1);
viewer->addPointCloud<pcl::PointXYZ>(cloud, "cloud"); //添加原始点云
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 0, 0, "cloud"); //颜色
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "cloud"); //点的大小
viewer->addPointCloud<pcl::PointXYZ>(cloud_line, "line"); //添加拟合点云
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 0, 0, "line"); //颜色
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "line"); //点的大小
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
//========================================================================
return 0;
}
输出结果:
->加载点云个数:55
直线点向式方程为:
(x - 2.72611) / 0.57735 = (y - 1.36255) / 0.57735 = (z - 3.71509) / 0.57735
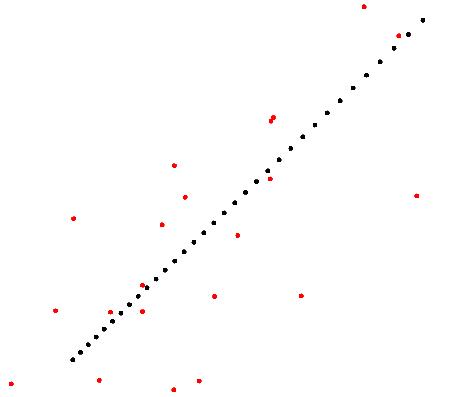
3 结果展示
4 源码
template <typename PointT> bool
pcl::SampleConsensusModelLine<PointT>::computeModelCoefficients (
const std::vector<int> &samples, Eigen::VectorXf &model_coefficients)
{
// Need 2 samples
if (samples.size () != 2)
{
PCL_ERROR ("[pcl::SampleConsensusModelLine::computeModelCoefficients] Invalid set of samples given (%lu)!\\n", samples.size ());
return (false);
}
if (fabs (input_->points[samples[0]].x - input_->points[samples[1]].x) <= std::numeric_limits<float>::epsilon () &&
fabs (input_->points[samples[0]].y - input_->points[samples[1]].y) <= std::numeric_limits<float>::epsilon () &&
fabs (input_->points[samples[0]].z - input_->points[samples[1]].z) <= std::numeric_limits<float>::epsilon ())
{
return (false);
}
model_coefficients.resize (6);
model_coefficients[0] = input_->points[samples[0]].x;
model_coefficients[1] = input_->points[samples[0]].y;
model_coefficients[2] = input_->points[samples[0]].z;
model_coefficients[3] = input_->points[samples[1]].x - model_coefficients[0];
model_coefficients[4] = input_->points[samples[1]].y - model_coefficients[1];
model_coefficients[5] = input_->points[samples[1]].z - model_coefficients[2];
model_coefficients.template tail<3> ().normalize ();
return (true);
}
相关链接:
实验数据下载:straightLine.pcd(提取码:pdx6)
以上是关于PCL:RANSAC 空间直线拟合的主要内容,如果未能解决你的问题,请参考以下文章