论文阅读|《用支持向量机求解AGV调度问题》(附带源码)
Posted 码丽莲梦露
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了论文阅读|《用支持向量机求解AGV调度问题》(附带源码)相关的知识,希望对你有一定的参考价值。
《A Support Vector Machine Approach for AGV Dispatching》
International Conference on Innovation and Management/ICIM/2018
台湾清华大学工业工程与工程管理系
1 摘要
随着高度自动化生产线的发展,自动导引车(AGVS)在物料搬运系统(MHS)中的应用越来越受到人们的关注。提出了一种基于支持向量机(SVM)的柔性制造系统(FMS)AGV动态调度方法。目标是最小化柔性制造系统中订单的平均拖期。为了生成支持向量机的训练数据,将进行仿真运行。文中还将讨论可能影响支持向量机性能的系统属性。最后,通过仿真模型验证了支持向量机调度模型的可行性。
2 AGV调度介绍
管理和控制AGVs系统可以分为以下几个部分:
(1)车辆调度;
(2)车辆定位;
(3)电池管理;
(4)车辆路径;
AGV调度规则可以总结为:根据AGV调度发生的时间点进行车辆启动调度和工作负载调度,这意味着调度发生在:(1)AGV卸载并闲置;(2)负载到达系统或由机器释放。
大多数调度规则一般书单属性调度规则(single-attributed dispatching rules),例如,STT(最短行程时间)规则只考虑了车辆与货物之间的行驶距离,而忽略了关于作业重要性(交货期)的信息。
由于没有调度规则被证明优于其他规则,这篇文章研究了基于机器学习的AGV调度问题,它是根据环境的现状做出车辆调度决策的。
2.1 基于机器学习的调度
基于机器学习的调度问题可以用{O,M,D,R,S}来表示(Park,1997)。O表示系统的目标;M表示制造模式,表示应考虑哪些系统属性;D表示候选调度规则,表示ML调度员从中选择的调度规则集;R表示调度规则的启发式,表示应用哪种ML方法进行调度;S表示可能的系统状态,表示应该考虑作为训练样本特征的系统属性的可能组合。
3 论文解读
3.1 问题描述
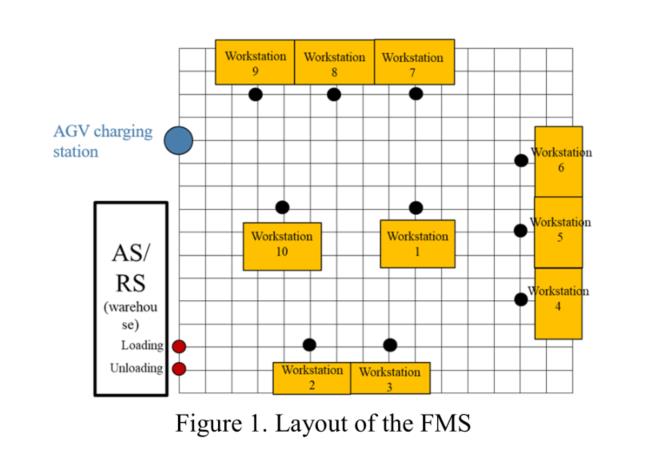
FMS布局下图可见,其中Workstation中包括单台机器和输入、输出队列,订单随机到达仓库warehouse(仓库),并附有交货期和作业类型。AGV的任务是在仓库的装载站接受订单,然后交付给workstation的P/D(拾取/交付)站,当作业完成,由AGV运到warehouse的卸载站。系统中有一个AGV充电站,AGV将在以下两种情况下进入充电站:(1)一旦车辆电量低于一定水平;(2) 如果AGV在工作站的P/D点空载,另一辆AGV需要相同的P/D点来拾取或卸载负载。AGV在网格状网络引导路径上行驶,AGV的行驶方向为:向上,向下,向左和向右。
AGVs系统中使用的调度规则将在每个调度周期内更改,并且在以下调度周期内应采用哪种调度规则是本文的主要问题。调度问题的目标是最大程度地减少平均工作迟到(T)。此绩效指标定义为函数:

其中θ是所有已完成工件的集合,μ是系统中尚未完成流程的工件集合。dj和cj分别是工件j的交货期和完工时间,n表此当前记录次数。
3.2 支持向量机在AGV调度中的应用
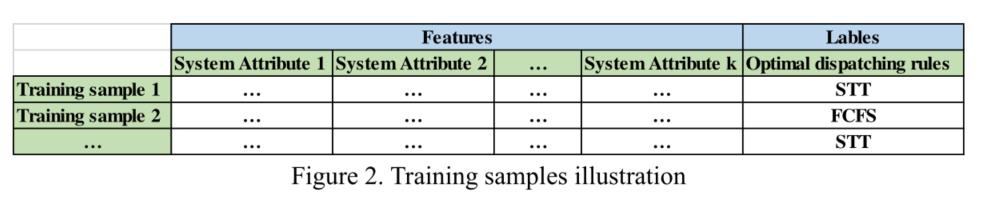
AGV调度问题中训练样本的概念如下图所示:
3.2.1 候选调度规则
这篇文章SVM的用法就是使用SVM选择合适的调度规则给调度系统。AGV调度规则中有些是车辆选择送货顺序的规则,有些是货物选择送货车辆的规则。因此,SVM调度规则分为两种类型:
(1)车载调度候选调度规则:
STT(最短行程时间):选择位于离车辆最近的位置的作业。
FCFS(先到先服务):选择最早要求车辆运输的工作。
MROQS(最小剩余输出队列空间):选择位于剩余空间最高的输出队列中的作业。
EDD(最早到期日):选择到期日最早的职务。
CR(临界比率):选择临界比率最低的作业(CR=(到期日-现在)/(剩余操作时间))。
DS(动态松弛):选择松弛时间最小的作业(松弛时间=剩余到期日-剩余操作时间)。
(2)
(2)工作站启动调度的候选调度规则:
NV(最近车辆):选择距离作业地点最近的车辆。
LIV(最长怠速车辆):选择怠速时间最长的车辆。
LU(最低利用率车辆):选择利用率最低的车辆。
3.2.2 特征选择-制造模式(Features selection-Manufacturing pattern)
实验共选取了9个系统属性作为训练样本的特征:
(1) 工件数
(2) 工件的平均剩余时间
(3) 工件当期加工时间到其交货期的剩余时间的标准偏差
(4) 工件的平均加工时间(加工时间加上最短运输时间)
(5) 工件加工时间的标准差
(6) workstation的平均工作负荷
(7) workstation的工作负荷标准差
(8) 空闲AGV的个数
(9) 系统中低电量水平AGV的个数
3.2.3 训练过程

4 实验
4.1 算例
测试环境由10台workstation组成,可以处理10种工件类型。不同的工件类型有不同的作业顺序和不同的加工时间。工件到达间隔时间服从指数分布,平均为34秒,分别为瓶颈工作站100%的作业周期。工件交货期均匀分布在作业周期最短的一到三倍之间。该系统有7辆AGV。工件数据集来自<Bagchi, T. P . (1999). Multiobjective scheduling by genetic algorithms. Springer Science & Business Media. >。
4.2 结果

以上是关于论文阅读|《用支持向量机求解AGV调度问题》(附带源码)的主要内容,如果未能解决你的问题,请参考以下文章