ROS2极简总结-Nav2-概述(下)恢复器
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS2极简总结-Nav2-概述(下)恢复器相关的知识,希望对你有一定的参考价值。
恢复器概述 Recovery Overview

注意最右侧黄色部分,具体如下。
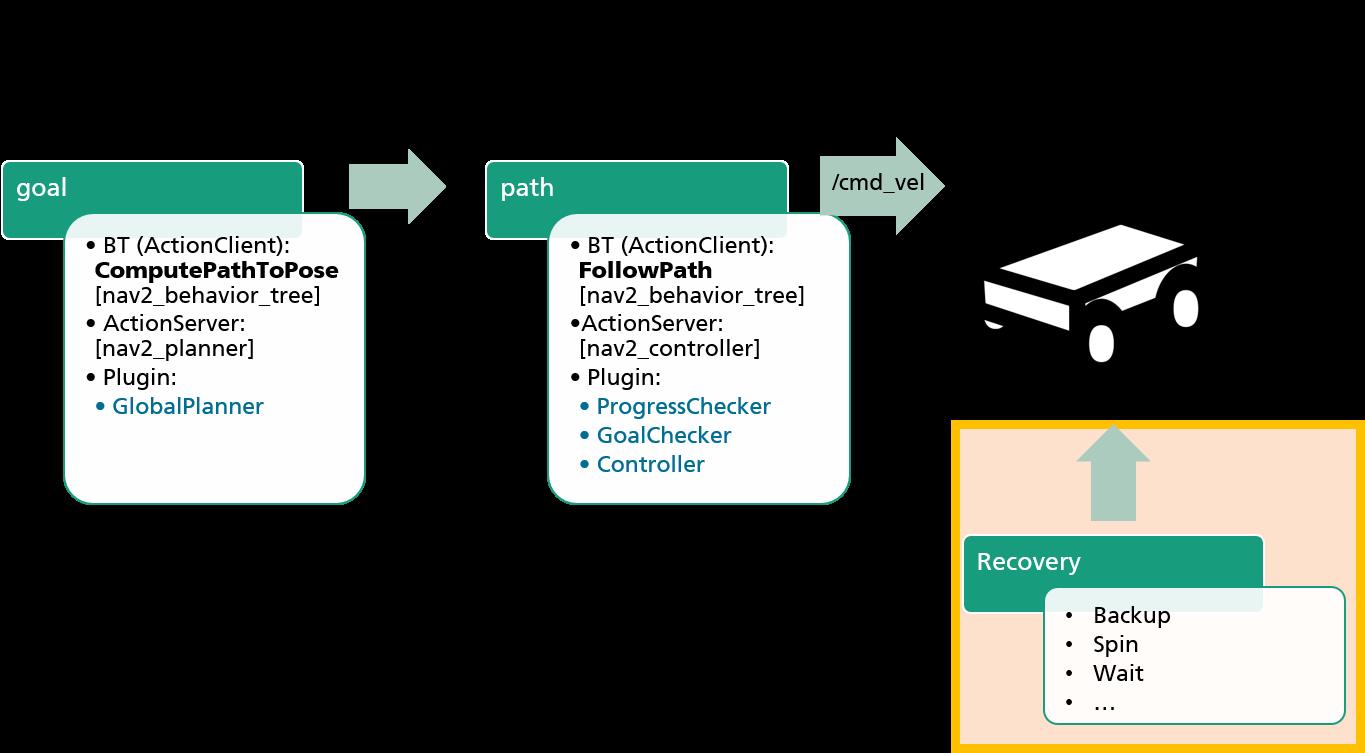
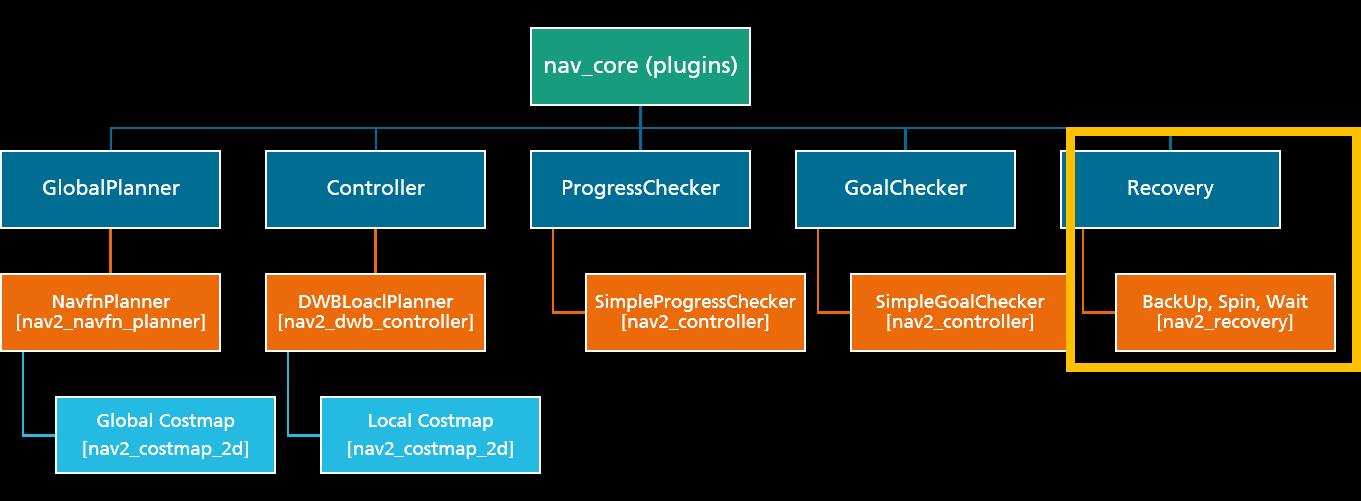
插件 Plugins
- BackUp 备份
- Spin 旋转
- Wait 等待
恢复服务器 Recovery Server
定义机器人可以执行的恢复操作。
[nav2_costmap_2d]
- 清除代价地图
[nav2_recoveries]
- 旋转 - 按给定角度原地旋转
- 备份 - 给定距离的线性平移
- 停止 - 停止机器人
recoveries_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
recovery_plugins: ["spin", "backup", "wait"]
spin:
plugin: "nav2_recoveries/Spin"
backup:
plugin: "nav2_recoveries/BackUp"
wait:
plugin: "nav2_recoveries/Wait"
global_frame: odom
robot_base_frame: base_link
transform_timeout: 0.1
use_sim_time: False
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2生命周期管理器 Life Cycle Manager
NAV2 中的节点由 ROS2 的生命周期管理器管理(参考ROS2极简总结,核心和新增概念部分)。

Nav2目标
Nav2 的目标是:
- 可定制 - 定制行为的逻辑能力,更少分叉代码
- 模块化 - 更轻松地替换规划器和控制算法
- 可扩展性 - 使用 Python 或其他语言编写规划程序和控件
使用以下方法提高质量:
- 可靠性 - 系统应该能够以一致的方式执行
- 质量 - 提交的代码应该在合并前进行验证
- 可维护性 - 工作流程应防止上述回归
Nav2总结
- 许多节点参与导航功能实现,都非常重要的。
- 基于插件的,如果有自定义的规划器,可以把它当作插件来使用
- 很多参数(可以对其中一些使用动态重新配置)
- 始终小心命名(主题、TF),否则容易出错。
- 使用行为树 XML 编排导航操作
关于导航实践部分,请参考:
- Nav2极简笔记系列
以上是关于ROS2极简总结-Nav2-概述(下)恢复器的主要内容,如果未能解决你的问题,请参考以下文章