智能车竞赛技术报告 | 节能信标组-东北大学-天魁队
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了智能车竞赛技术报告 | 节能信标组-东北大学-天魁队相关的知识,希望对你有一定的参考价值。

简 介: 本文主要介绍了第十六届智能车竞赛四轮的相关设计思想。此四轮车系统由
STC16F40K128微控制器为核心控制单元,通过电感传感器检测赛道下方导线以识别赛道,通过陀螺仪获得原始数据进行角度解算,使用编码器采集车轮速度。结合车模及赛道物理模型对行车最优路径进行规划,利用PID算法及其相关控制算法调节舵机与电机输出,达到对单车的平衡控制、转向控制。
关键词: STC16F、角度解算,卡尔曼滤波,PID,控制,路径规划
队伍名称:天魁
参赛队员:史岩松 吕江 汪志伟
带队教师:马明旭 李小号
引言
全国大学生智能汽车竞赛是以"立足培养、重在参与、鼓励探索、追求卓越" 为指导思想,鼓励创新的一项科技竞赛活动。制作完成一个能够自主识别道路的模型汽车。参赛队员的目标是模型汽车需要按照规则以最短时间完成单圈赛道。
在准备比赛的过程中,我们小组成员涉猎控制、模式识别、传感技术、汽车电子、电气、计算机、机械等多个学科,这次磨练对我们的知识融合和实践动手能力的培养有极大的推动作用,所有队员都为此次智能汽车竞赛付出了艰苦的劳动。
第一章 系统总体设计
1.1系统概述
单车主要由三个部分组成:检测系统,控制决策系统和动力系统。其中检测系统采用电感和ICM20602陀螺仪,控制决策系统采用STC16F40K128作为主控芯片,动力系统主要控制直流电机的转速。整体的流程为,通过电感来检测前方的赛道信息,并将赛道信息发送给单片机。根据所取得的赛道信息和车体当前横滚角度以及速度信息,由主控单片机做出决策,并通过PWM信号控制直流电机以及舵机进行相应动作,从而实现车体的转向控制和速度控制。
1.2整车布局
(1)电池放于车模中下部,重心下移,增大后轮摩擦,提高速度。
(2)将电感安装碳素杆支架上,然后固定在3D打印的底座上,再通过m2的螺丝固定在车上。
(3)陀螺仪安装在车辆下部,同样是固定在3D打印支架上。
(4)主板安装在后座上,驱动安装在车右侧面,左侧面是减速齿轮以及编码器。
第二章 比赛任务及机械结构设计
2.1 单车拉力组比赛任务
2.1.1 比赛任务
(1)车模
车模使用竞赛指定的新款K车模,不限制尺寸。
(2)微控制器与传感器
车模的微控制器使用 STC 公司的单片机。 允许使用各类电磁、红外光电、激光传感器、超声传感器器件进行赛道和环境检测。
(3)比赛赛道与任务
赛道铺设于室外,略简单于电磁越野赛道。快车行驶一周完成循迹任务即可。慢车赛道极为简易,画一个圆圈即可,考察车模的控制稳定性。
2.1.2第十六届赛道特殊元素
单车拉力组赛道元素较为简单,主要由折线构成(自行设计赛道可加入曲线),主要元素有折线转弯、十字、坡道,另外国赛设计赛道还要求加入直角。
2.2 机械结构设计
为了提高智能车的竞技性能,必须了解其机械结构,并且对其结构上的不足 之处加以改进。今年的单车是新车模-K车模,裸车模结构如下。

2.2.1 电池安装
电池采用的是7.4V 3000mAh的锂离子电池.电池是除车模外最重的外设,对于单车来说它的位置起着关键作用.主要靠他来降低重心.所以我们将他安放于车底.
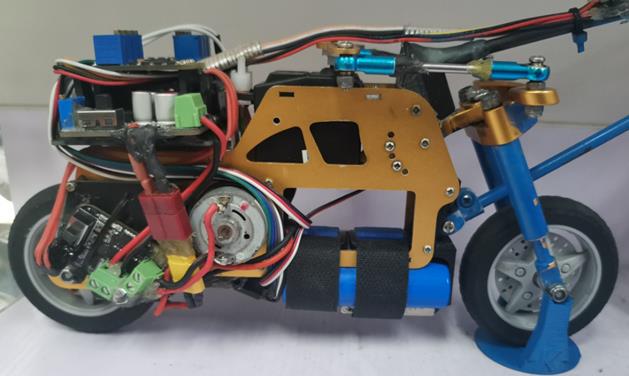
2.2.2 碳杆支架
为了确保电磁能稳定循迹减少晃动,碳杆的牢固性是关键。单车采用3D打印碳杆支架,架电感。

2.2.3 编码器的安装
为了更为精确的获得电机转速的返回值,本次车模上安装的是龙邱512 线编码器,选择质量和体积都较小的编码器以控制车身重量。 用定制加工件和齿轮进行了安装配合,尽量使得传动齿轮轴保持平行,传动部分轻松、流畅,不存在过大噪音和丢数情况。编码器安装直接使用车模上的编码器安装孔。如图

2.2.4舵机安装
原车模舵机为SD-12,经过多次实验发现其控制板经常烧坏,我们果断将舵机换为S3010,其安装如下

2.3 本章小结
本章主要介绍了小车的安装制作和调试过程中机械方面的具体的问题。我们 从开始准备比赛以来,一直坚持机械结构和算法是同样重要的原则,在更新算法的同时也在提高相应的机械和硬件结构来适应。上面的介绍是最终确定的小车安装方法。
第三章 硬件设计
3.1 硬件设计方案
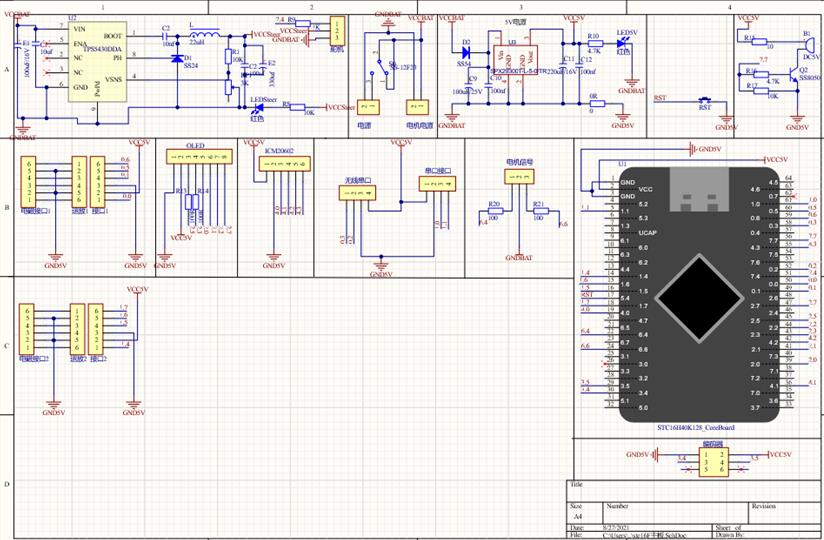
整控制系统是由四部分组成的:STC16F40K128核心板、主板、电机驱动电路板,运放板。最小系统板可以插在主板上组成信号采集、处理和电机控制单元。同时为了减小电机驱动电路带来的干扰,我们把控制部分和电机驱动分开来。主板主要电路包括如下:电源稳压电路、最小系统板插座、电机驱动器接口、编码器接口、运放接口、OLED、电源接口等。
3.2 系统核心板
单片机最小系统板使用逐飞stc16f核心板。主板上仅将本系统所用到的引脚引出,包括信号接口、外部中断接口、若干普通 IO 接口等。
3.3 传感器选择
本设计中,传感器分为两部分:陀螺仪传感器、运放传感器。
3.3.1 编码器
本小车使用编码器由 LDO 芯片RT9013-33 为其提供 3.3V 工作电压。处理器通过读取编码 器脉冲数来实现小车速度的检测,通过读取编码器旋转方向脚的高低电平来检测 电机的正反转。编码器原则上轻,小为好,选龙邱编码器较好,所以最终选用 512 线龙邱编码器。
3.4 电路设计
智能车的电路设计决定了系统可靠性与稳定性,电感采值可靠性以及驱动的性能等,本系统的电路围绕stc16f单片机为核心的最小系统板设计主板,且驱动与主板不在同一块板上,核心板可插在主板上,经过测试及使用,本系统的电路设计稳定可用。
3.4.1 主板部分
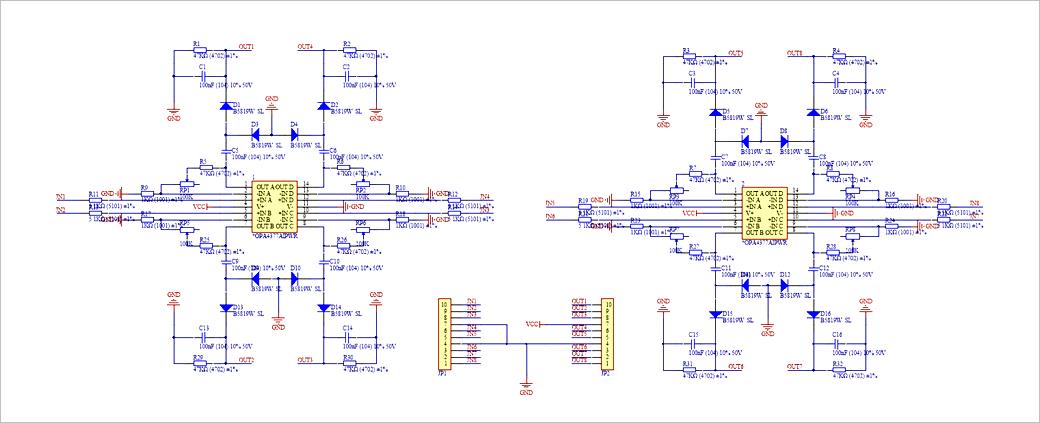
3.4.2运放版部分
运放板采用八路输入,电路图如图
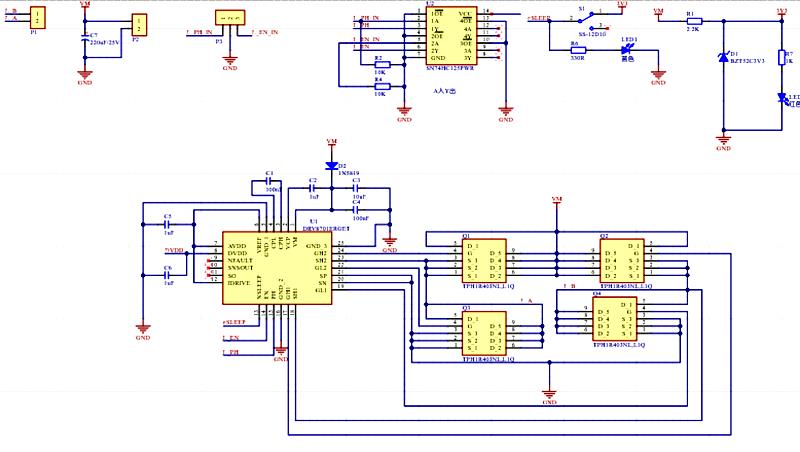
3.4.3驱动板部分
第四章 软件系统设计
4.1. 软件控制程序的整体思路
软件的控制,就是让控制车模在符合比赛规则前提下,以最快最稳定的速度跑完整个赛道。不论上哪种方案,软件的总体框架总是相似的,我们追求的就是稳定至上,兼顾速度,以我们的方案,软件上就是电磁采集、电磁处理,姿态传感器(陀螺仪、加速度计)数据采集并进行姿态解算,速度控制、速度反馈。
4.2 角度解算
对陀螺仪原始数据的处理,即角度解算的过程尤为重要,精准度以及平滑程度将会直接影响控制的效果。解算方法根据原始数据分大致有三种:硬件DMP、四元数解算、滤波解算,其中滤波主要有卡尔曼滤波、互补滤波、巴特沃斯滤波等。由于STC16F单片机算力相对较弱,我们最终选择了卡尔曼滤波的方法解算角度,效果尚可。
4.3 电机控制
单车的控制主要是电机与舵机的控制。具体的控制算法为 PID 控制及其衍生算法。
简单说来,PID控制器各校正环节的作用如下:
- 比例环节:及时成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差。
- 积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数,越大,积分作用越弱,反之则越强。
- 微分环节:能反映偏差信号的变化趋势(变化速率),并能在该偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从
而加快系统的动作速度,减小调节时间。
数字PID控制算法通常分为位置式PID控制算法和增量式PID控制算法。
位置式PID
位置式PID中,由于计算机输出的u (k) 直接去控制执行机构(如阀门),u(k)的值和执行机构的位置(如阀门开度)是一一对应的,所以通常称公式(4.3.2)为位置式PID控制算法。
增量式PID具有以下优点:
由于计算机输出增量,所以误动作时影响小,必要时可用逻辑判断的方法关掉。
手动/自动切换时冲击小,便于实现无扰动切换。此外,当计算机发生故障时,由于输出通道或执行装置具有信号的锁存作用,故能保持原值。
算式中不需要累加。控制增量△u(k)的确定仅与最近k次的采样值有关,所以较容易通过加权处理而获得比较好的控制效果。
4.4.1 PID 参数整定
运用 PID 控制的关键是调整 KP、KI、KD 三个参数,即参数整定。PID 参数的整定方法有两大类:一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数;二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。
4.4.2 单车速度控制方案
整个控制系统有两部分,电机控制与舵机控制。为了调试方便我们并没有使两个控制相互关联。即在速度恒定的情况下去调整舵机输出的参数。
4.4 磁感采集与路径识别
路径识别传感器我们使用的使磁场感应器,由于室外无法使用摄像头,电磁变为我们唯一识别赛道的方式。为了识别精准,我们建立的导线周围的磁场强度的数学模型,将磁场测量值带入数学模型得出智能车的准确位置。传感器分为水平和垂直两种,水平用于控制车体回正,垂直用于检测直角、十字以及帮助提前识别弯道。
对于磁场传感器采集的数据,经过差比和得出偏离赛道的程度,经验证,得出结果与偏离距离近似线性,可以使用。
4.5 本章小结
本章主要介绍了智能车比赛中所用到的磁感处理,电机控制算法和舵机转向过程等软件程序。这些程序是赛车检测系统的核心,我们一次又一次的找问题后优化,优化后找问题。不断尝试新的控制算法,学习新的知识,并把新的知识应用于智能车上。
智能车比赛的程序不是一时半会就能写好的,也不是一些好就能直接使用的,它需要经过一次次的调试,找问题调参数,直到到达最佳状态。并且我们要想更近一步,要不断去尝试新的算法,从其他角度经行寻找解决方案,对比之下选最优。
参 考 文 献
(1) 王盼宝.智能车制作.北京.清华大学出版社.2018
附录A:主要技术参数
| 项目 | 参数 |
|---|---|
| 赛题组 | 单车拉力组 |
| 车号 | k车 |
| 车模几何尺寸(长、宽、高)(毫米) | 510 245 165 |
| 传感器种类及个数 | 编码器×1;陀螺仪×1 |
| 新增加伺服电机个数 | 0 |
以上是关于智能车竞赛技术报告 | 节能信标组-东北大学-天魁队的主要内容,如果未能解决你的问题,请参考以下文章
智能车竞赛技术报告 | 节能信标组 - 合肥工业大学 - 烂虾队
智能车竞赛技术报告 | 节能信标组 - 华南理工大学 - 华工雨花队
智能车竞赛技术报告 | 节能信标组-哈尔滨工业大学紫丁香五队
智能车竞赛技术报告 | 节能信标组 - 兰州交通大学 - 先锋队