MPU9250的MPL移植_HAL库(以STM32F103为主控)
Posted 一剃解千愁
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了MPU9250的MPL移植_HAL库(以STM32F103为主控)相关的知识,希望对你有一定的参考价值。
准备材料:
驱动库: motion_driver_6.12
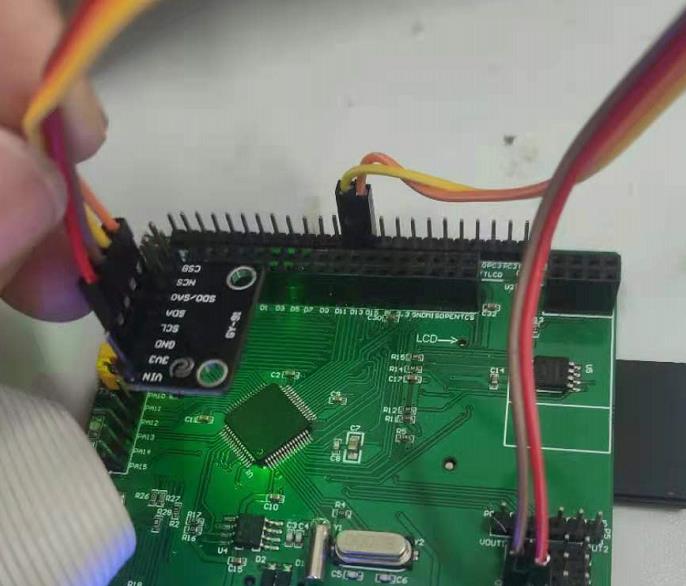
硬件: 正点原子MINI——STM32f103RCT6硬件IIC——PB8,PB9
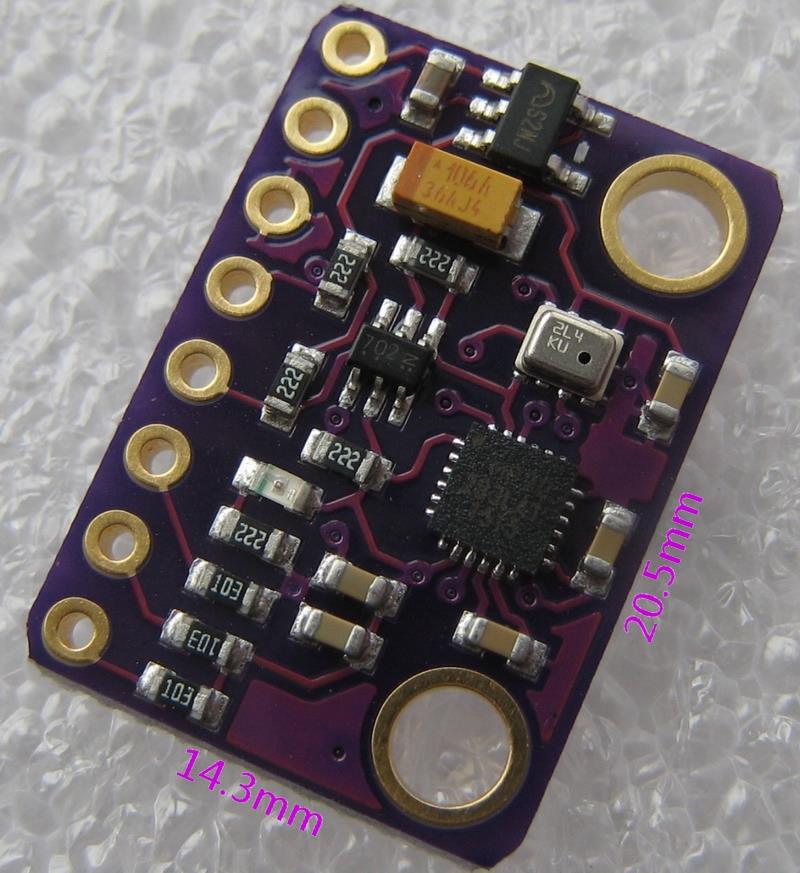
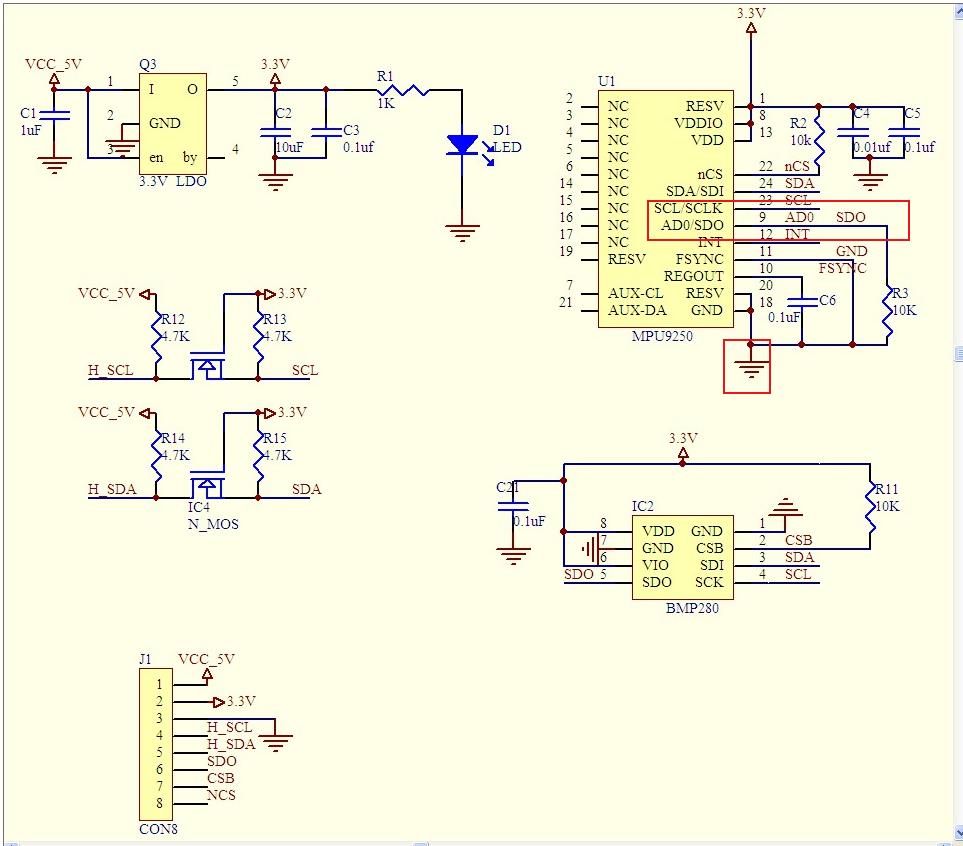
GY-91模块: 看图可知AD0接地,地址是0X68
硬件连接:
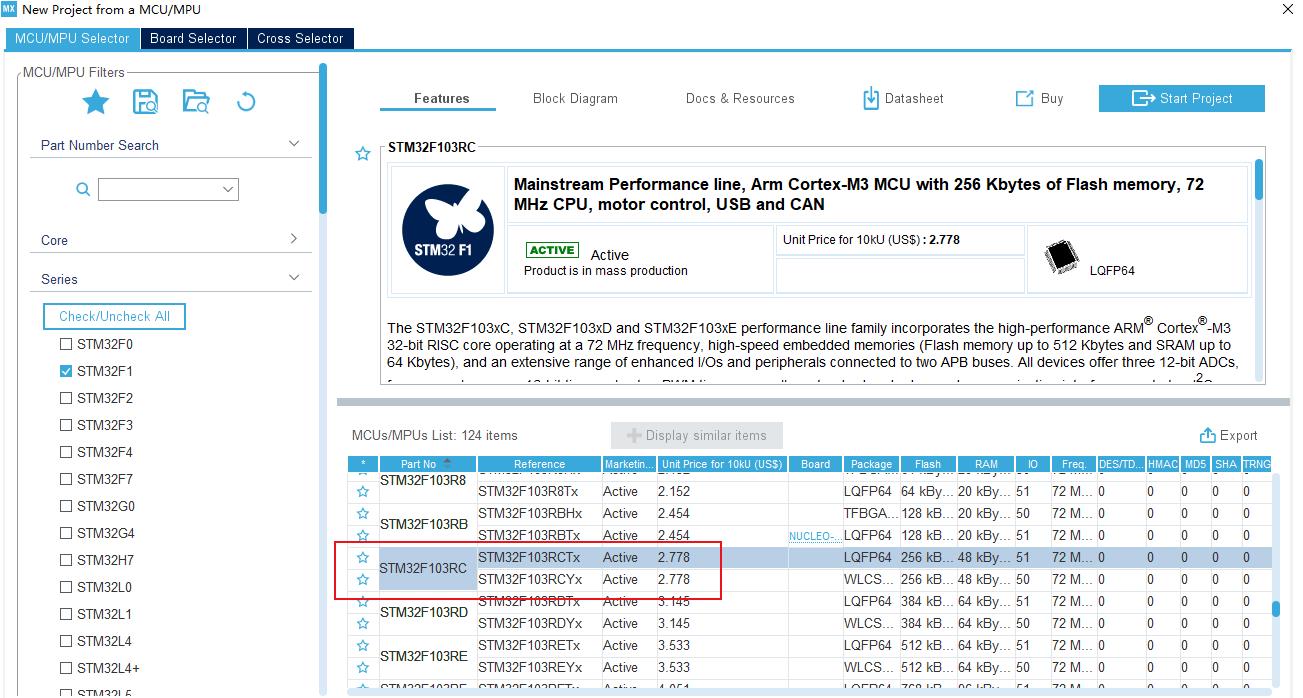
**生成代码工具:**STM32CubeMX
1,选择芯片双击
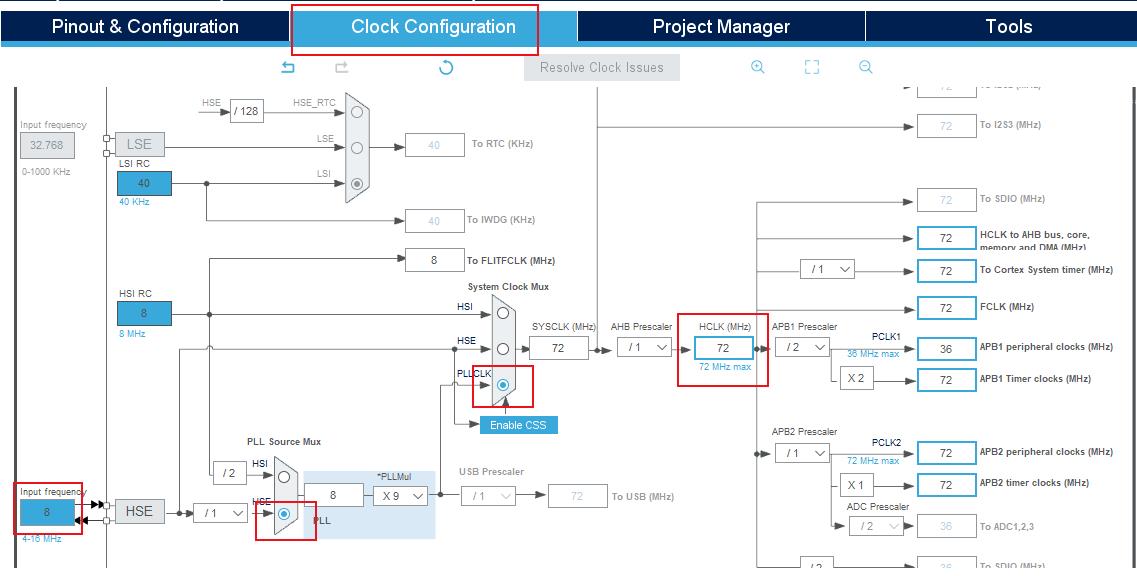
2,选择外部晶振,然后配置时钟

硬件外接的晶振是8M,根据自己的晶振选择,选择HSE和PLCLK,输入72,按enter自动配置时钟
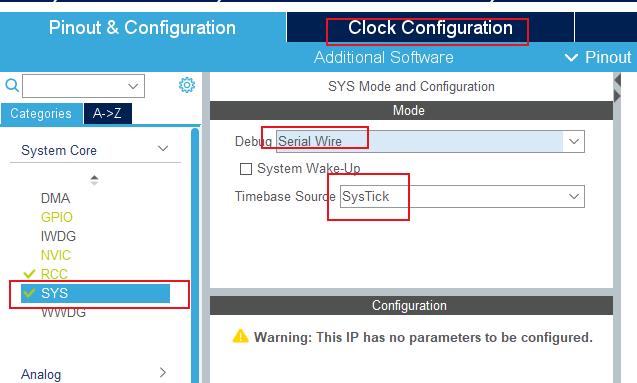
3,选择sys,配置代码烧入方式为:SWD,基本时钟源没使用操作系统使用的画使用默认的:SysTick
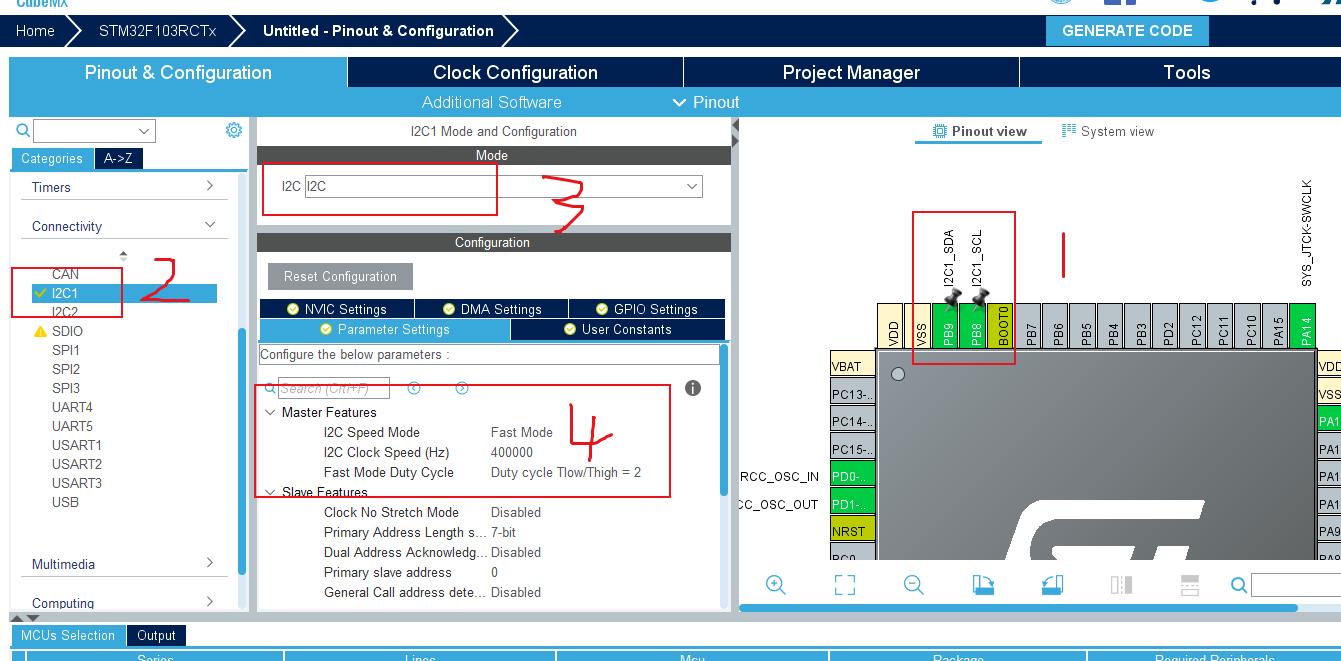
4,因为PB8和PB9的IIC是复用功能的,所以先选择引脚,再使能IIC1

使能IIC后,黄变绿,选择快速模式400KHZ
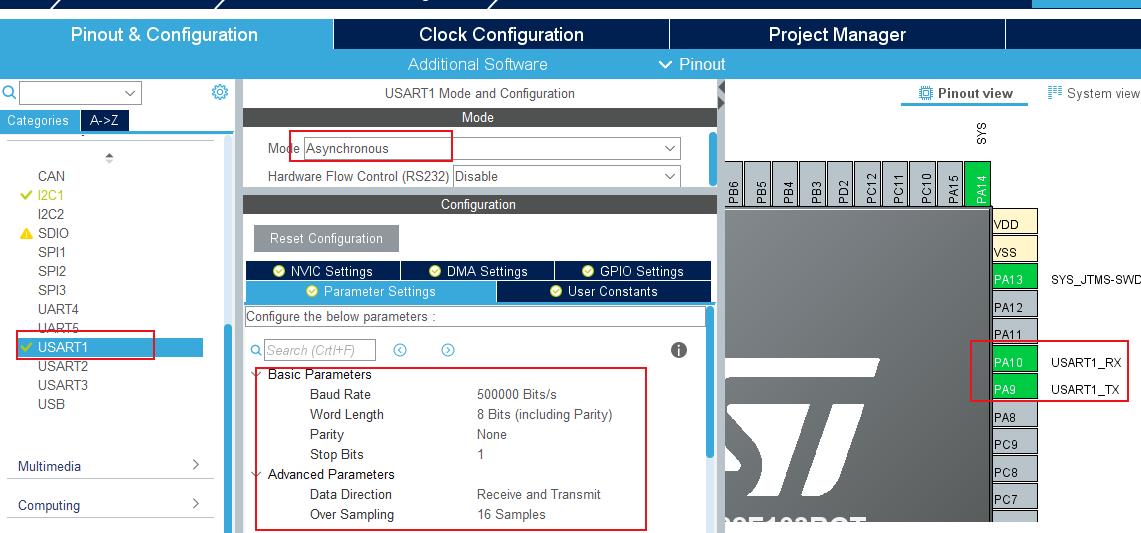
5,因为要用到串口1,所以得配置串口1,波特率暂设为500000和上位机一致,后续也可以在代码中更改
6,取工程名,选择编译平台,分配堆栈,选择位置的路径不要用中文,工程名最好用英文,不然会出点问题
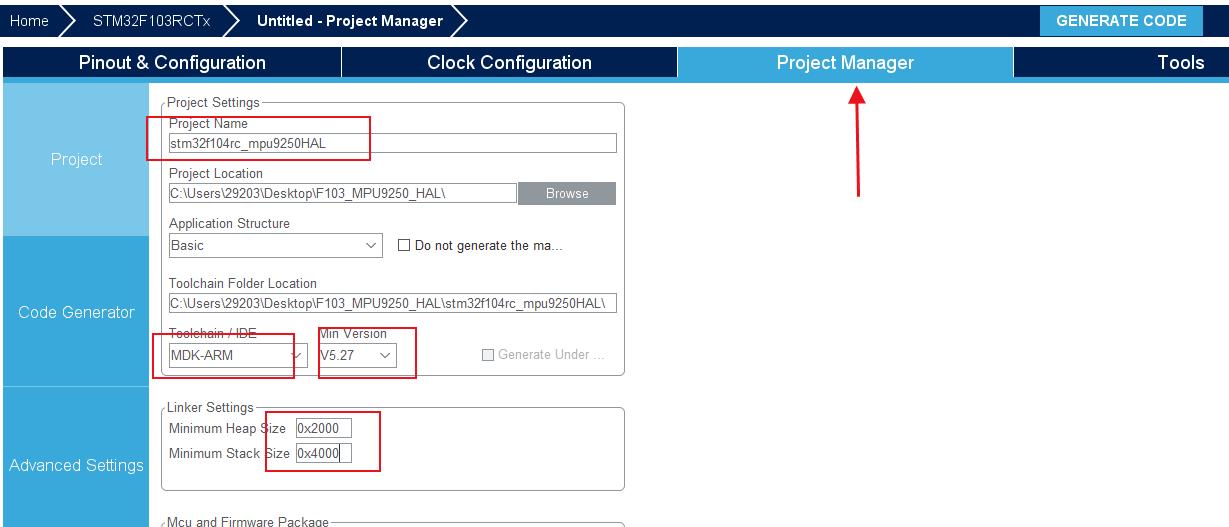
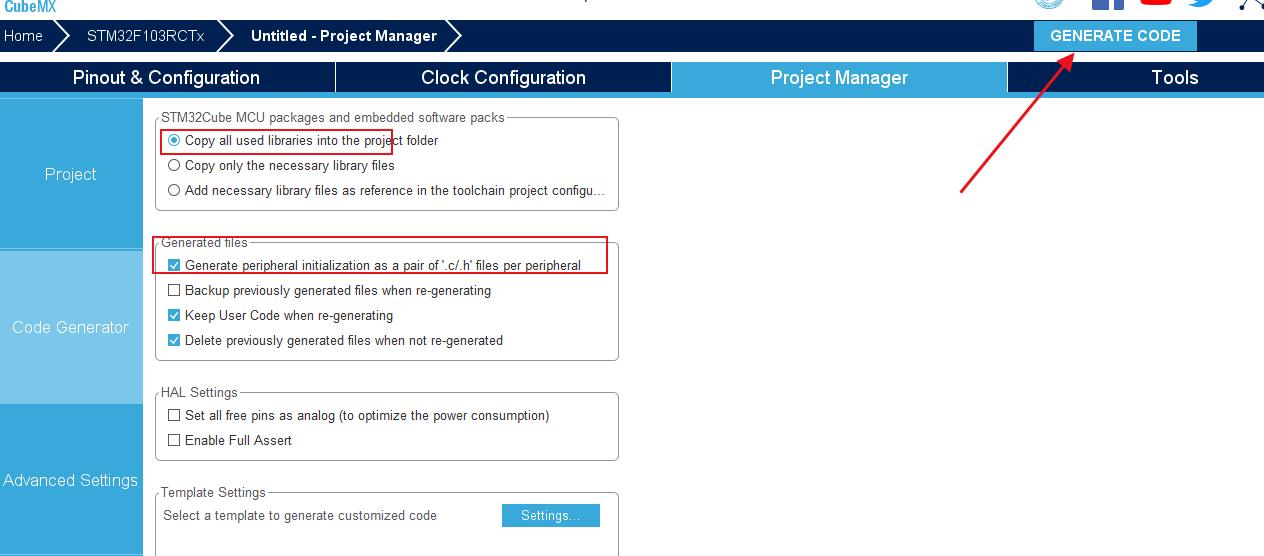
7,使用全部库,选择只用到本工程需要的库也行,后续需要再添加
需要选择为每个外设都生成c文件和头文件,这样有分类感,便于开发,点击生成代码
配置MPL
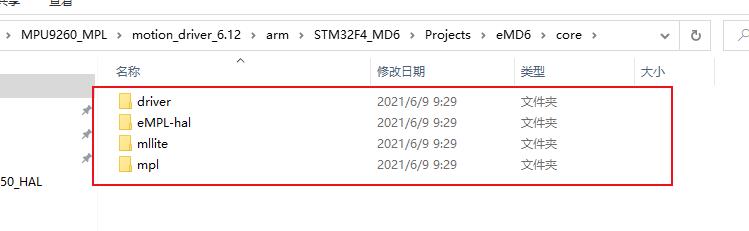
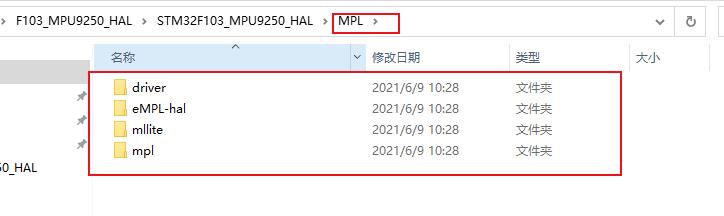
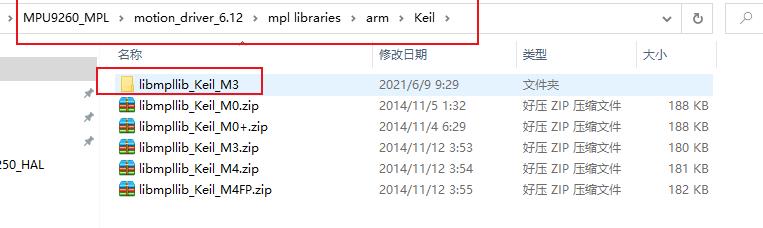
1,把这个路径的四个文件拷贝到工程,取名为MPL
 2,因为现在用的是stm32103,其内核是CM3,需要CM3的库:
2,因为现在用的是stm32103,其内核是CM3,需要CM3的库:
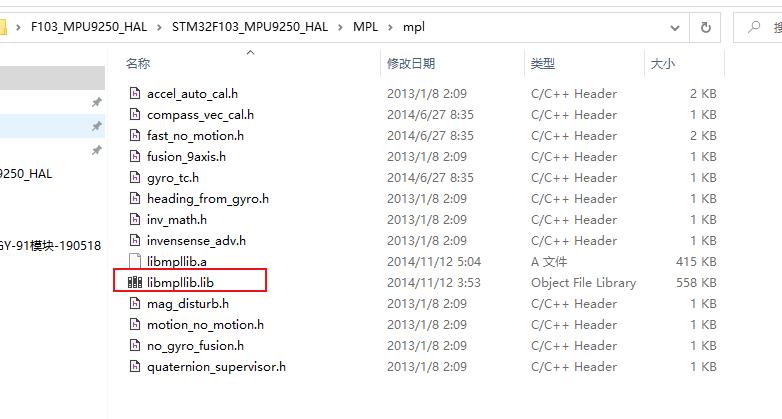
在驱动库中找到:libmpllib.lib
复制粘贴到工程谋文件:
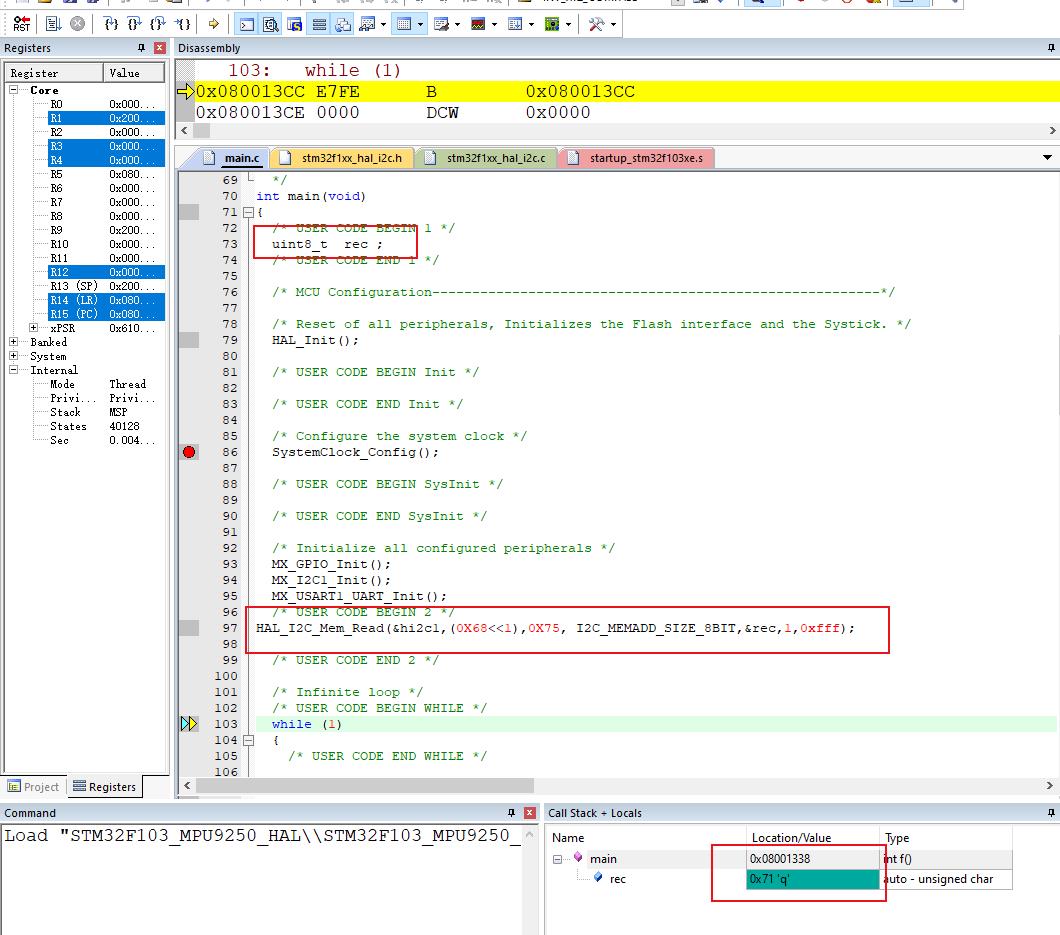
3,然后用keil打开打开工程,先编译一下,没报错,现在测试IIC和模块是否正常通信:
HAL_StatusTypeDef HAL_I2C_Mem_Read(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout);
进入调试界面,查看rec
HAL_I2C_Mem_Read(&hi2c1,(0X68<<1),0X75, I2C_MEMADD_SIZE_8BIT,&rec,1,0xfff);
代码含义:使用硬件IIC1,去访问IIC地址为0X68的设备,这个设备地址0x75内存地址出有数据0x71,如果能读出,则说明正常通信,超时0xfff毫秒退出
读出的是ox71‘q’,这个q的ASSIC码就是71,有点奇怪为什么还多了个‘q’,0X68可看作是IIC设备的7位地址,,但是在IIC协议通信时传送的是一个字节,所以需要将7位地址往高位移,最低位空出来,当读或者写使用
4,将MPL驱动加入到工程
将所有的c文件和哪个lib加入到工程
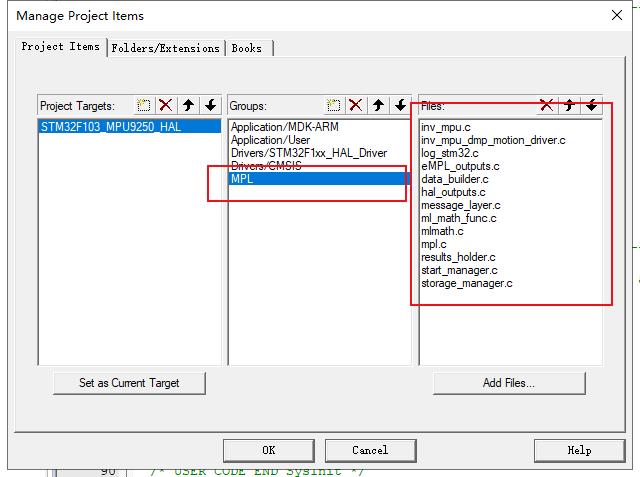
发现lib没有成功加入,采用如下方法
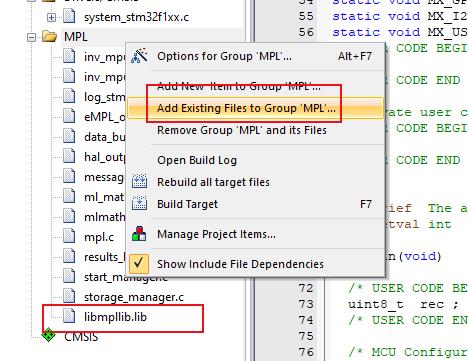
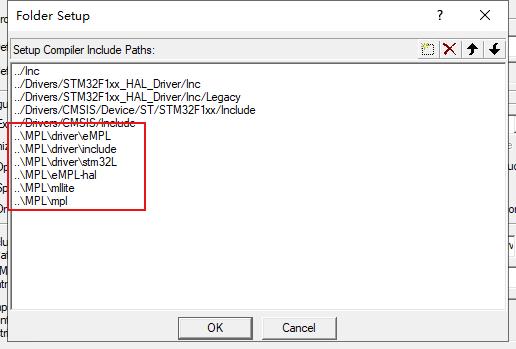
配置路径:路径具体到每个子文件夹
参考这个文章:
移植DMP时需要改哪些文件的哪些代码
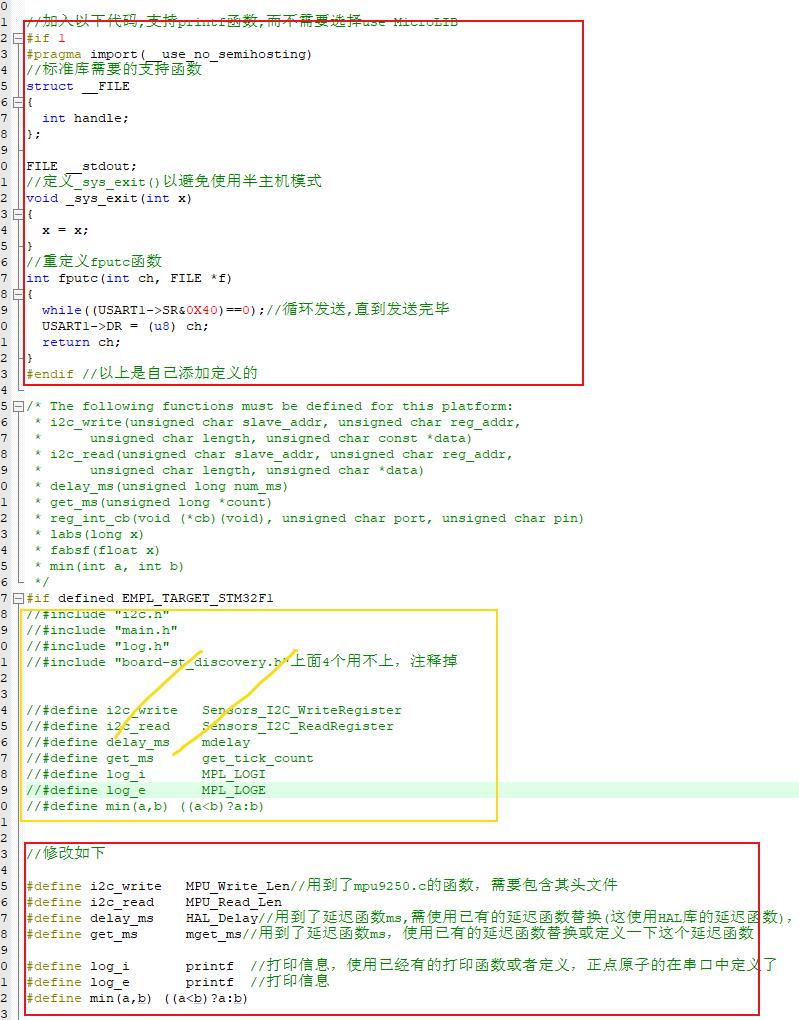
修改MPL驱动库:
1,为更好看一点,改下宏定义,把F4改成F1,选中,全部查找,替换
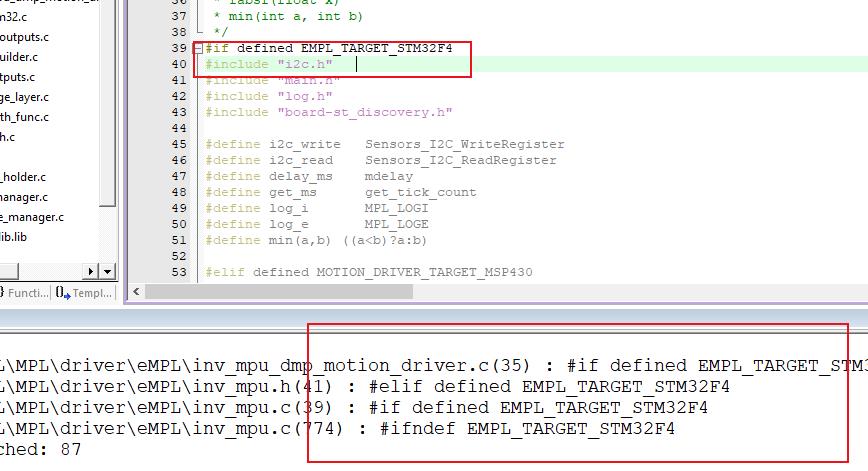
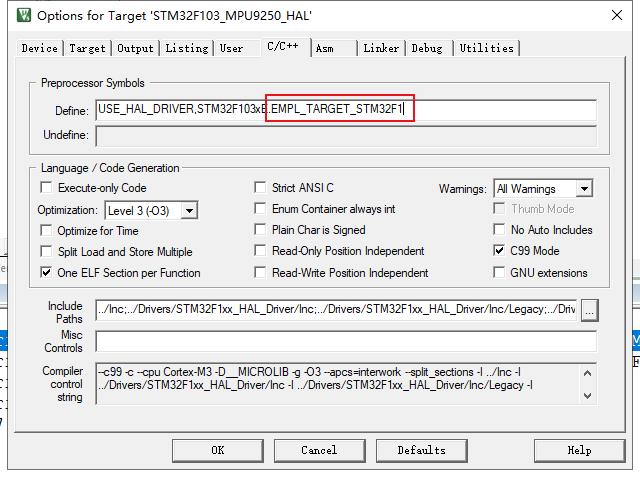
添加宏定义:EMPL_TARGET_STM32F1,变亮

最后还要添加几个宏,最终为:
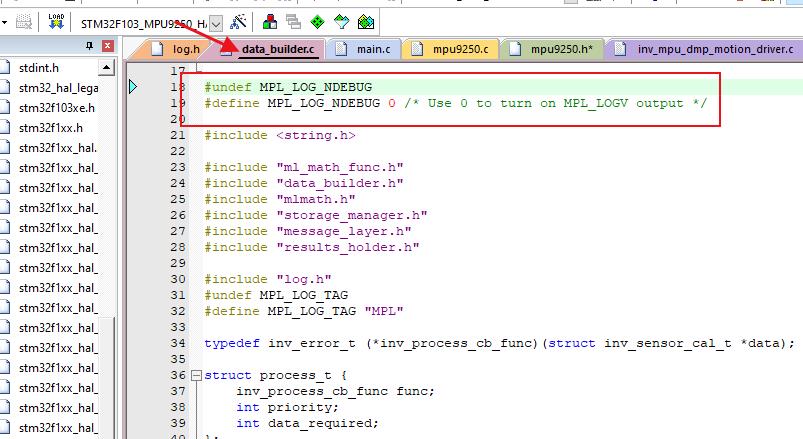
USE_HAL_DRIVER,STM32F103xE,EMPL_TARGET_STM32F1,MPU9250,EMPL,MPL_LOG_NDEBUG=1
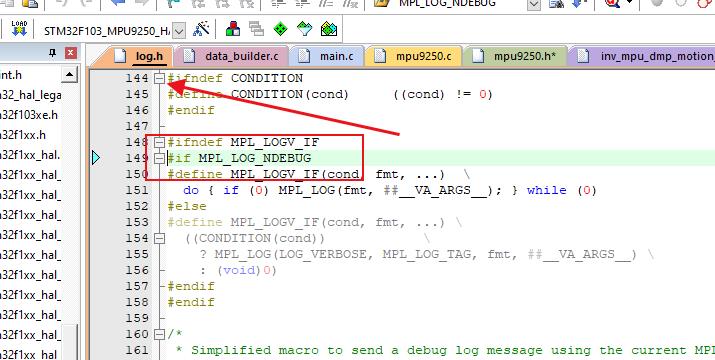
MPL_LOG_NDEBUG在这2文件需要:
EMPL_TARGET_STM32F1在多个文件需要:
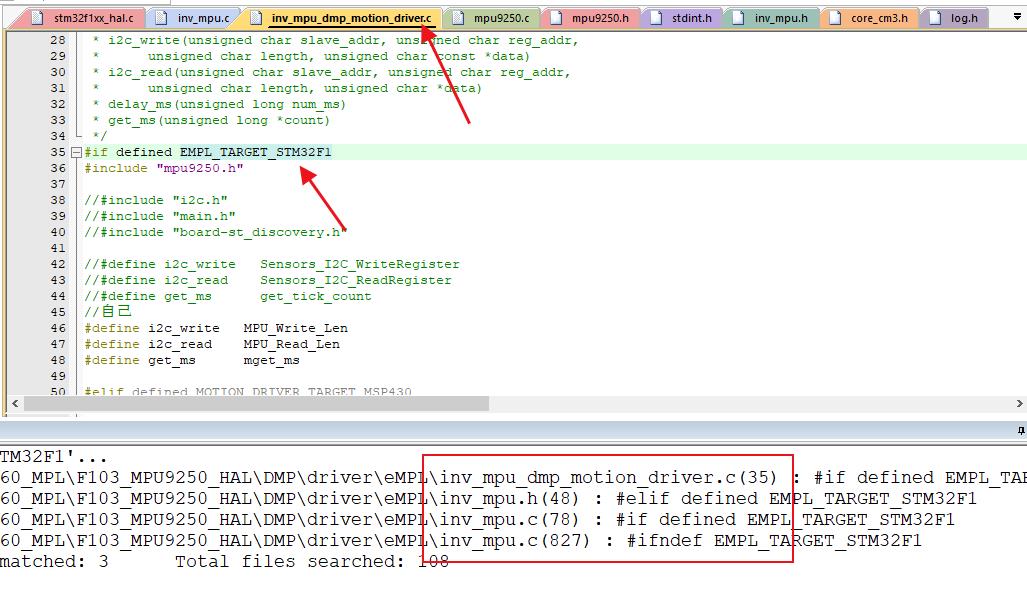
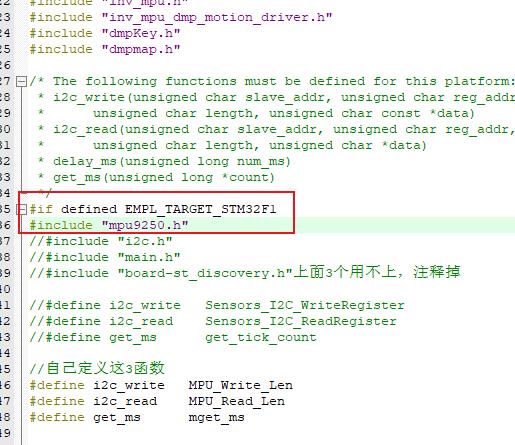
修改"inv_mpu_dmp_motion_driver.c"为:
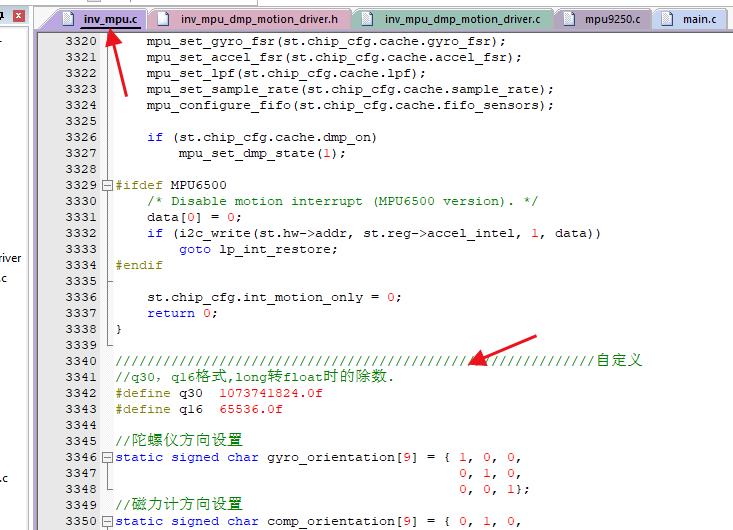
修改"inv_mpu.c"为:
注意:根据硬件电路,决定MPU9250的IIc地址的AD0引脚不同,有0x68(AD0接地)和0x69(AD0接高电平)地址,这个地方要检查下是否为对应地址

后面代码如下:
自定义
//q30,q16格式,long转float时的除数.
#define q30 1073741824.0f
#define q16 65536.0f
//陀螺仪方向设置
static signed char gyro_orientation[9] = { 1, 0, 0,
0, 1, 0,
0, 0, 1};
//磁力计方向设置
static signed char comp_orientation[9] = { 0, 1, 0,
1, 0, 0,
0, 0,-1};
//MPU9250自测试
//返回值:0,正常
// 其他,失败
u8 run_self_test(void)
{
int result;
//char test_packet[4] = {0};
long gyro[3], accel[3];
result = mpu_run_6500_self_test(gyro, accel,0);
if (result == 0x7)
{
/* Test passed. We can trust the gyro data here, so let's push it down
* to the DMP.
*/
unsigned short accel_sens;
float gyro_sens;
mpu_get_gyro_sens(&gyro_sens);
gyro[0] = (long)(gyro[0] * gyro_sens);
gyro[1] = (long)(gyro[1] * gyro_sens);
gyro[2] = (long)(gyro[2] * gyro_sens);
//inv_set_gyro_bias(gyro, 3);
dmp_set_gyro_bias(gyro);
mpu_get_accel_sens(&accel_sens);
accel[0] *= accel_sens;
accel[1] *= accel_sens;
accel[2] *= accel_sens;
// inv_set_accel_bias(accel, 3);
dmp_set_accel_bias(accel);
return 0;
}else return 1;
}
//方向转换
unsigned short inv_row_2_scale(const signed char *row)
{
unsigned short b;
if (row[0] > 0)
b = 0;
else if (row[0] < 0)
b = 4;
else if (row[1] > 0)
b = 1;
else if (row[1] < 0)
b = 5;
else if (row[2] > 0)
b = 2;
else if (row[2] < 0)
b = 6;
else
b = 7; // error
return b;
}
//空函数,未用到.
void mget_ms(unsigned long *time)
{
//*time=(unsigned long)HAL_GetTick();
}
//mpu6050,dmp初始化
//返回值:0,正常
// 其他,失败
u8 mpu_dmp_init(void)
{
u8 res=0;
struct int_param_s int_param;
unsigned char accel_fsr;
unsigned short gyro_rate, gyro_fsr;
unsigned short compass_fsr;
if(mpu_init(&int_param)==0) //初始化MPU9250
{
res=inv_init_mpl(); //初始化MPL
if(res)return 1;
inv_enable_quaternion();
inv_enable_9x_sensor_fusion();
inv_enable_fast_nomot();
inv_enable_gyro_tc();
inv_enable_vector_compass_cal();
inv_enable_magnetic_disturbance();
inv_enable_eMPL_outputs();
res=inv_start_mpl(); //开启MPL
if(res)return 1;
res=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL|INV_XYZ_COMPASS);//设置所需要的传感器
if(res)return 2;
res=mpu_configure_fifo(INV_XYZ_GYRO | INV_XYZ_ACCEL); //设置FIFO
if(res)return 3;
res=mpu_set_sample_rate(DEFAULT_MPU_HZ); //设置采样率//宏定义在头文件COMPASS_READ_MS
if(res)return 4;
res=mpu_set_compass_sample_rate(1000/COMPASS_READ_MS); //设置磁力计采样率
if(res)return 5;
mpu_get_sample_rate(&gyro_rate);
mpu_get_gyro_fsr(&gyro_fsr);
mpu_get_accel_fsr(&accel_fsr);
mpu_get_compass_fsr(&compass_fsr);
inv_set_gyro_sample_rate(1000000L/gyro_rate);
inv_set_accel_sample_rate(1000000L/gyro_rate);
inv_set_compass_sample_rate(COMPASS_READ_MS*1000L);//宏定义在头文件COMPASS_READ_MS
inv_set_gyro_orientation_and_scale(
inv_orientation_matrix_to_scalar(gyro_orientation),(long)gyro_fsr<<15);
inv_set_accel_orientation_and_scale(
inv_orientation_matrix_to_scalar(gyro_orientation),(long)accel_fsr<<15);
inv_set_compass_orientation_and_scale(
inv_orientation_matrix_to_scalar(comp_orientation),(long)compass_fsr<<15);
res=dmp_load_motion_driver_firmware(); //加载dmp固件
if(res)return 6;
res=dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation));//设置陀螺仪方向
if(res)return 7;
res=dmp_enable_feature(DMP_FEATURE_6X_LP_QUAT|DMP_FEATURE_TAP| //设置dmp功能
DMP_FEATURE_android_ORIENT|DMP_FEATURE_SEND_RAW_ACCEL|DMP_FEATURE_SEND_CAL_GYRO|
DMP_FEATURE_GYRO_CAL);
if(res)return 8;
res=dmp_set_fifo_rate(DEFAULT_MPU_HZ); //设置DMP输出速率(最大不超过200Hz)
if(res)return 9;
res=run_self_test(); //自检
if(res)return 10;
res=mpu_set_dmp_state(1); //使能DMP
if(res)return 11;
}
return 0;
}
//得到dmp处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多)
//pitch:俯仰角 精度:0.1° 范围:-90.0° <---> +90.0°
//roll:横滚角 精度:0.1° 范围:-180.0°<---> +180.0°
//yaw:航向角 精度:0.1° 范围:-180.0°<---> +180.0°
//返回值:0,正常
// 其他,失败
u8 mpu_dmp_get_data(float *pitch,float *roll,float *yaw)
{
float q0=1.0f,q1=0.0f,q2=0.0f,q3=0.0f;
unsigned long sensor_timestamp;
short gyro[3], accel[3], sensors;
unsigned char more;
long quat[4];
if(dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors,&more))return 1;
/* Gyro and accel data are written to the FIFO by the DMP in chip frame and hardware units.
* This behavior is convenient because it keeps the gyro and accel outputs of dmp_read_fifo and mpu_read_fifo consistent.
**/
/*if (sensors & INV_XYZ_GYRO )
send_packet(PACKET_TYPE_GYRO, gyro);
if (sensors & INV_XYZ_ACCEL)
send_packet(PACKET_TYPE_ACCEL, accel); */
/* Unlike gyro and accel, quaternions are written to the FIFO in the body frame, q30.
* The orientation is set by the scalar passed to dmp_set_orientation during initialization.
**/
if(sensors&INV_WXYZ_QUAT)
{
q0 = quat[0] / q30; //q30格式转换为浮点数
q1 = quat[1] / q30;
q2 = quat[2] / q30;
q3 = quat[3] / q30;
//计算得到俯仰角/横滚角/航向角
*pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch
*roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
*yaw = atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //yaw
}else return 2;
return 0;
}
//得到mpl处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多)
//pitch:俯仰角 精度:0.1° 范围:-90.0° <---> +90.0°
//roll:横滚角 精度:0.1° 范围:-180.0°<---> +180.0°
//yaw:航向角 精度:0.1° 范围:-180.0°<---> +180.0°
//返回值:0,正常
// 其他,失败
u8 mpu_mpl_get_data(float *pitch,float *roll,float *yaw)
{
unsigned long sensor_timestamp,timestamp;
short gyro[3], accel_short[3],compass_short[3],sensors;
unsigned char more;
long compass[3],accel[3],quat[4],temperature;
long data[9];
int8_t accuracy;
if(dmp_read_fifo(gyro, accel_short, quat, &sensor_timestamp, &sensors,&more))return 1;
if(sensors&INV_XYZ_GYRO)
{
inv_build_gyro(gyro,sensor_timestamp); //把新数据发送给MPL
mpu_get_temperature(&temperature,&sensor_timestamp);
inv_build_temp(temperature,sensor_timestamp); //把温度值发给MPL,只有陀螺仪需要温度值
}
if(sensors&INV_XYZ_ACCEL)
{
accel[0] = (long)accel_short[0];
accel[1] = (long)accel_short[1];
accel[2] = (long)accel_short[2];
inv_build_accel(accel,0,sensor_timestamp); //把加速度值发给MPL
}
if (!mpu_get_compass_reg(compass_short, &sensor_timestamp))
{
compass[0]=(long)compass_short[0];
compass[1]=(long)compass_short[1];
compass[2]=(long)compass_short[2];
inv_build_compass(compass,0,sensor_timestamp); //把磁力计值发给MPL
}
inv_execute_on_data();
inv_get_sensor_type_euler(data,&accuracy,×tamp);
*roll = (data[0]/q16);
*pitch = -(data[1]/q16);
*yaw = -data[2] / q16;
return 0;
}
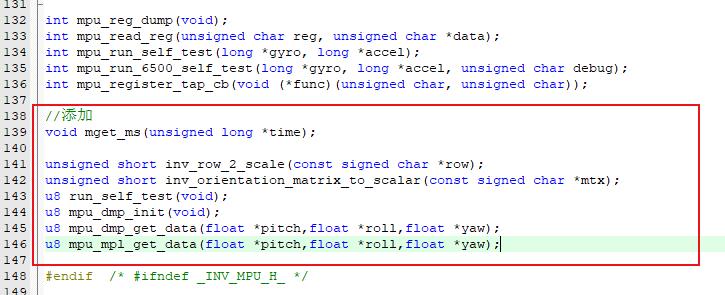
修改 "inv_mpu.h"为:
修改 "log.stm32.c"为:
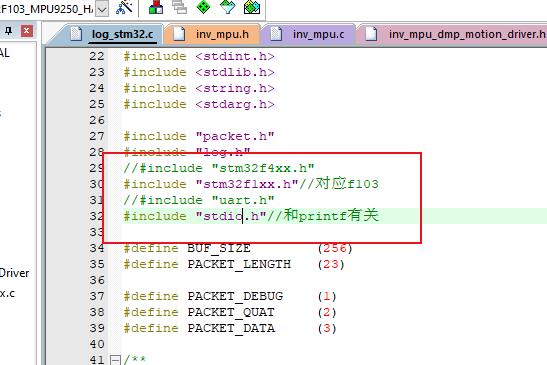
三个函数都这样修改
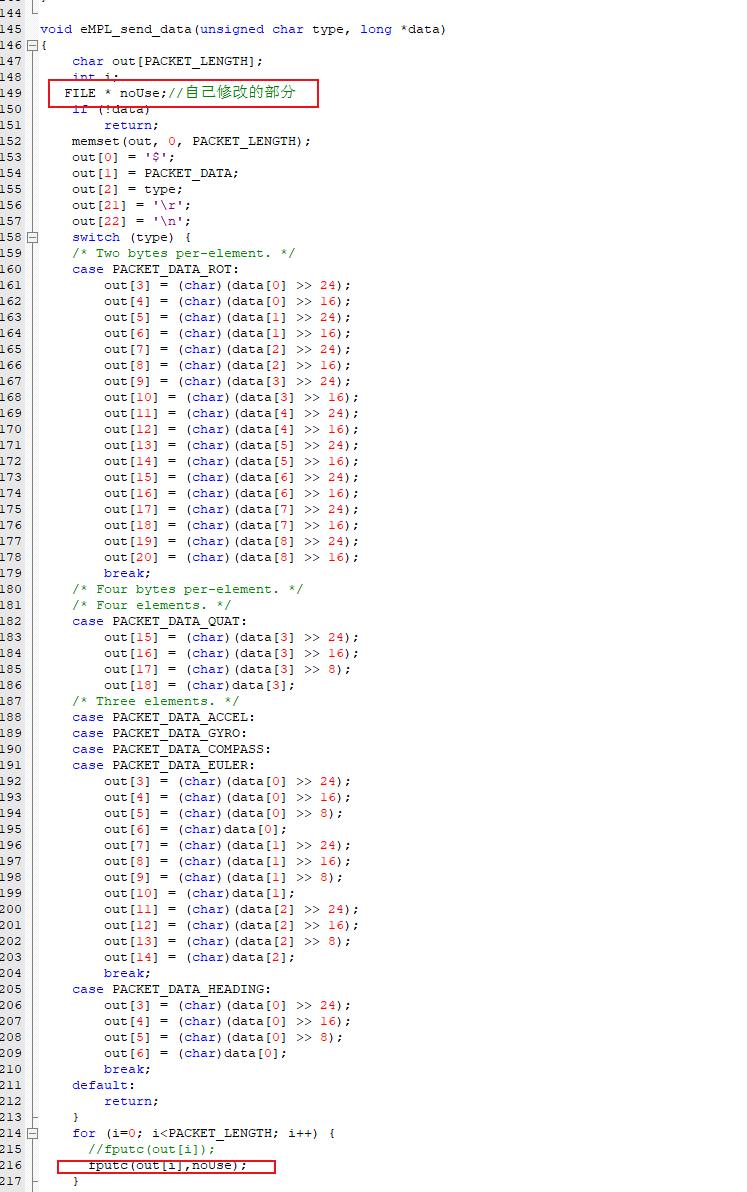
上位机:
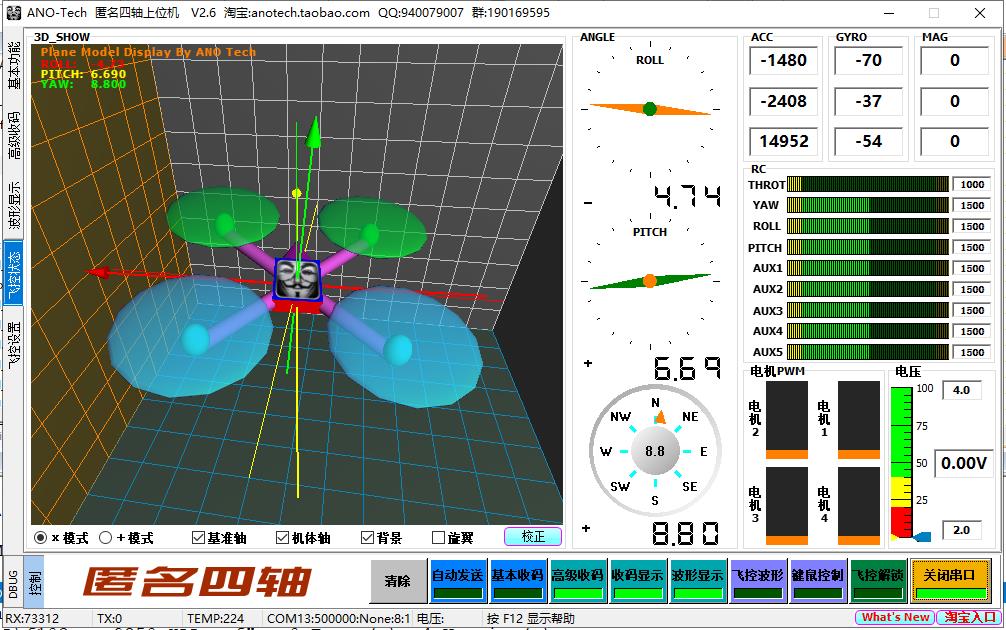
上位机的代码不一样,看清对应的是哪个
//fun:功能字. 0X01~0X1C
data:数据缓存区,最多28字节!!
len:data区有效数据个数
void usart1_niming_report(u8 fun,u8*data,u8 len)
{
u8 send_buf[32];
u8 i;
if(len>28)return; //最多28字节数据
send_buf[len+3]=0; //校验数置零
send_buf[0]=0XAA; //帧头
send_buf[1]=0XAA; //帧头
send_buf[2]=fun; //功能字
send_buf[3]=len; //数据长度
for(i=0;i<len;i++)send_buf[4+i]=data[i]; //复制数据
for(i=0;i<len+4;i++)send_buf[len+4]+=send_buf[i]; //计算校验和
for