卡尔曼滤波的应用
Posted 三明治开发社区
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了卡尔曼滤波的应用相关的知识,希望对你有一定的参考价值。
上一篇微型巡逻摄像头—硬件方案中讲到平衡小车中使用MPU6050采集姿态数据,由于物理震动等原因,姿态数据波动较大,难以获取真正的姿态状态,无形中增加了后期平衡算法的难度。因此,我们需要先将MPU6050采集到的数据,进行数字滤波处理。
以角度采集为例,这里给大家推荐两种滤波算法,分别是卡尔曼滤波算法和一阶互补滤波算法,本篇主要介绍卡尔曼滤波在微型巡逻摄像头上的应用。
首先是加速度和角速度采集,如下
Gyro_X=(I2C_ReadOneByte(devAddr,MPU6050_RA_GYRO_XOUT_H)<<8)
+I2C_ReadOneByte(devAddr,MPU6050_RA_GYRO_XOUT_L); //读取Y轴陀螺仪
Gyro_Z=(I2C_ReadOneByte(devAddr,MPU6050_RA_GYRO_ZOUT_H)<<8)
+I2C_ReadOneByte(devAddr,MPU6050_RA_GYRO_ZOUT_L); //读取Z轴陀螺仪
Accel_Y=(I2C_ReadOneByte(devAddr,MPU6050_RA_ACCEL_YOUT_H)<<8)
+I2C_ReadOneByte(devAddr,MPU6050_RA_ACCEL_YOUT_L); //读取X轴加速度计
Accel_Z=(I2C_ReadOneByte(devAddr,MPU6050_RA_ACCEL_ZOUT_H)<<8)
+I2C_ReadOneByte(devAddr,MPU6050_RA_ACCEL_ZOUT_L); //读取Z轴加速度计
if(Gyro_X>32768) Gyro_X-=65536; //数据类型转换 也可通过short强制类型转换
if(Gyro_Z>32768) Gyro_Z-=65536; //数据类型转换
if(Accel_Y>32768) Accel_Y-=65536; //数据类型转换
if(Accel_Z>32768) Accel_Z-=65536; //数据类型转换
Gyro_X=Gyro_X-Gyro_X_OFFSET;
Gyro_Z=Gyro_Z-Gyro_Z_OFFSET;
Gyro_Balance=Gyro_X; //更新平衡角速度
Accel_Angle=atan2(Accel_Y,Accel_Z)*180/PI; //计算倾角 这里的Accel_Angle就是我们通过计算得出的原始角度值。
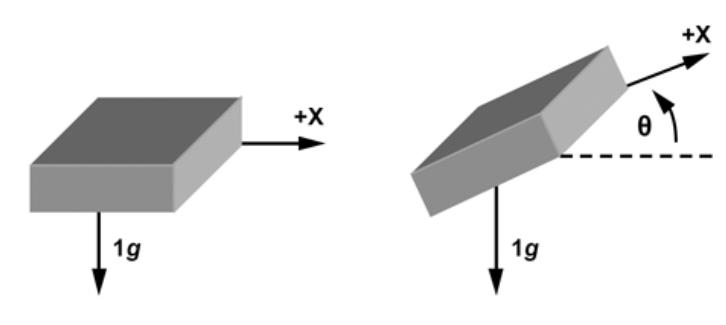
当然,也可以用公式Accel_Angle=arcsin(Accel_Y,Accel_G)*180/PI;
其中Accel_G=sqrt(pow(Accel_X, 2) + pow(Accel_Y, 2) + pow(Accel_Z, 2));
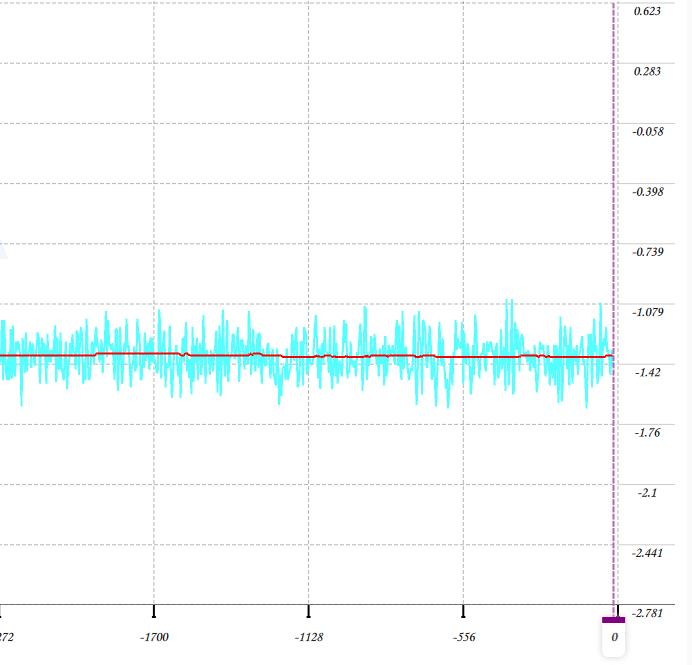
我们将设备静态放置,将数据绘制出来,如图
可以看到,原始数据波动特别大。
我们加入卡尔曼滤波,
Kalman_Filter(Accel_Angle,Gyro_X);
其中函数如下
void Kalman_Filter(float Accel,float Gyro)
{
angle+=(Gyro - Q_bias) * dt; //先验估计
Pdot[0]=Q_angle - PP[0][1] - PP[1][0]; // Pk-先验估计误差协方差的微分
Pdot[1]=-PP[1][1];
Pdot[2]=-PP[1][1];
Pdot[3]=Q_gyro;
PP[0][0] += Pdot[0] * dt; // Pk-先验估计误差协方差微分的积分
PP[0][1] += Pdot[1] * dt; // =先验估计误差协方差
PP[1][0] += Pdot[2] * dt;
PP[1][1] += Pdot[3] * dt;
Angle_err = Accel - angle; //zk-先验估计
PCt_0 = C_0 * PP[0][0];
PCt_1 = C_0 * PP[1][0];
E = R_angle + C_0 * PCt_0;
K_0 = PCt_0 / E;
K_1 = PCt_1 / E;
t_0 = PCt_0;
t_1 = C_0 * PP[0][1];
PP[0][0] -= K_0 * t_0; //后验估计误差协方差
PP[0][1] -= K_0 * t_1;
PP[1][0] -= K_1 * t_0;
PP[1][1] -= K_1 * t_1;
angle += K_0 * Angle_err; //后验估计
Q_bias += K_1 * Angle_err; //后验估计
angle_dot = Gyro - Q_bias; //输出值(后验估计)的微分=角速度
}将数据绘制出来,如图
对比发现,加了卡尔曼滤波之后,数据更加平滑,贴近真实值。
以上是关于卡尔曼滤波的应用的主要内容,如果未能解决你的问题,请参考以下文章