Camera知识体系架构之驱动&应用&调试学习笔记-以瑞芯微RV1109为例
Posted Engineer-Bruce_Yang
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Camera知识体系架构之驱动&应用&调试学习笔记-以瑞芯微RV1109为例相关的知识,希望对你有一定的参考价值。
点击上方「嵌入式云IOT技术圈」,选择「置顶公众号」第一时间查看嵌入式笔记!C
Camera知识体系庞大、又杂、又难,虽然资料也不少,但是都很乱,很容易让人感到迷茫,失去学习的信心。对于初入这个体系的小白很难找到自己的学习的目标和方法。众所周知,学好Camera相关的知识,能够在音视频相关等行业拿到非常高的报酬:


根据最近自己调试瑞芯微RV1109平台Camera的一些心得体会,我将它们一一总结出来分享给大家:
1、瑞芯微平台Camera调试知识体系
1.1、调试RK平台摄像头的一些关键缩写语
| 缩写 | 全称 |
|---|---|
| 3A =>(AWB, AE, AF) | 表示AWB, AE, AF的简写 |
| AE =>(Auto Exposure) | 表示自动曝光 |
| AF =>(Auto Focus) | 表示自动对焦 |
| AWB =>(Auto White Balance) | 表示自动白平衡 |
| FBC =>(Frame Buffer Compressed) | 表示帧缓冲压缩 |
| FBC0 =>f(Rockchip yuv420sp fbc encoder) | 表示RK平台yuv420sp fbc 编码 |
| FBC2 =>(Rockchip yuv422sp fbc encoder) | 表示RK平台yuv422sp fbc 编码 |
| RkAiq =>(Rockchip Automatical Image Quality) | 表示RK平台自动图像质量 |
| IQ =>(Image Quality) | 表示图像质量 |
| ISP =>(Image Signal Process) | 表示图像信号处理 |
| ISPP =>(Image Signal Post Process) | 表示图像信号后处理 |
1.2、瑞芯微平台Camera调试知识体系划分
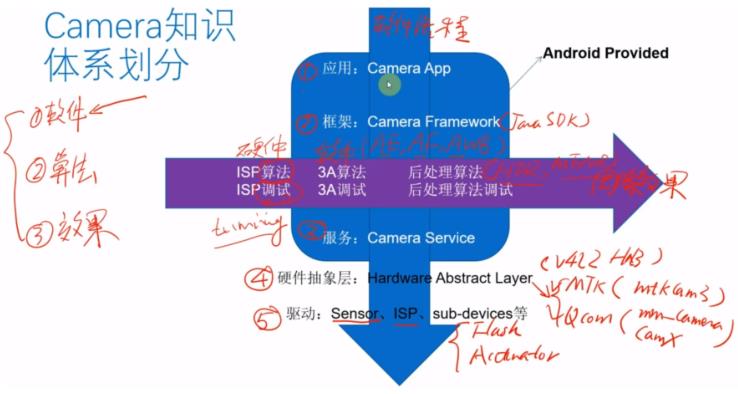
以上分为:软件控制流程、图像算法、图像效果,这是相对于android平台来划分的(图片来源于韦东山老师专家计划的Camera相关章节的学习笔记)。对于驱动工程师,我们只需要关注以下两个点:
图像算法:ISP算法(硬件)、3A算法(AE(曝光),AF(自动对焦),AWB(自动白平衡)、后处理算法(HDR、MFNR)
图像效果调试(Tunning):ISP调试、3A调试、后处理算法调试
1.3、瑞芯微平台中Camera的数据流通路
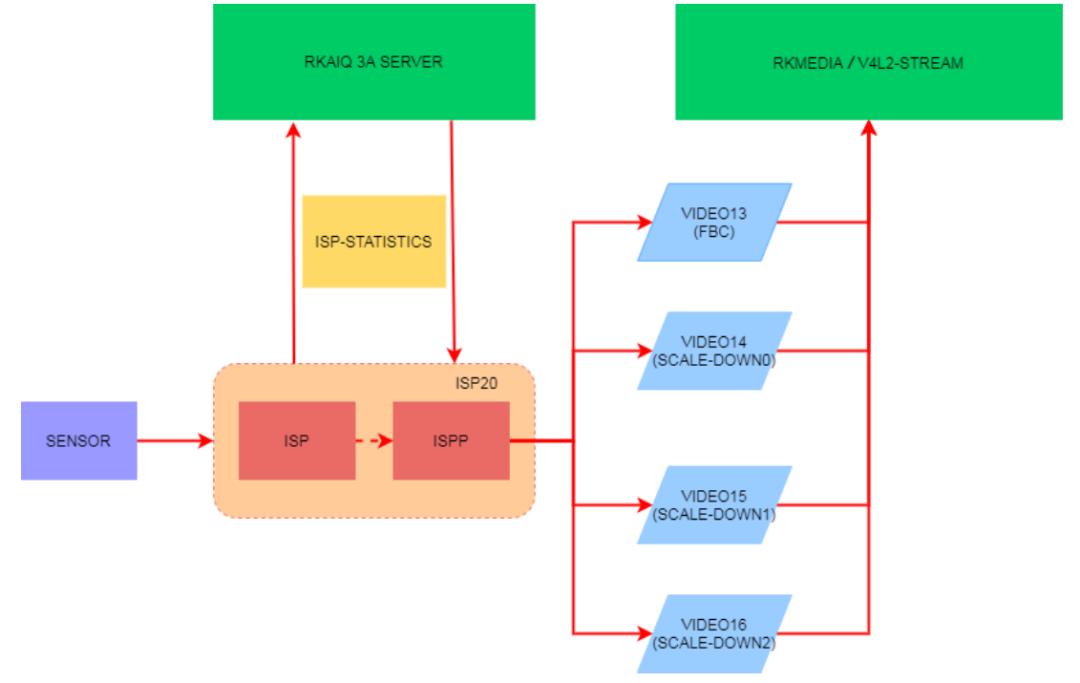 如上图(图片来源于瑞芯微原厂文档)所示,这张图反馈了以下信息:
如上图(图片来源于瑞芯微原厂文档)所示,这张图反馈了以下信息:
Camera数据经过ISP20采集,ISP20再输出经过一系列图像处理算法后的数据,RkAiq不断从ISP20获取统计数据,并经过3A等算法生成新的参数反馈给ISP20,如上所示,以上的设备节点并不是固定的,它可能会改变,我们可以使用media-ctl查看对应的节点。
RKISP驱动主要是依据v4l2 / media framework实现硬件的配置、中断处理、控制 buffer轮转,以及控制subdevice(如mipi dphy及sensor)的上下电等功能,它的处理过程其实是非常复杂的,我们来看下面这张图(图片来源于瑞芯微原厂文档)就知道了:

1.3.1、通过搜索/sys目录下查找对应的节点名称
grep "" /sys/class/video4linux/*/name
来获取相应的节点,如下所示,这是通过grep "" /sys/class/video4linux/*/name来获取的节点信息:


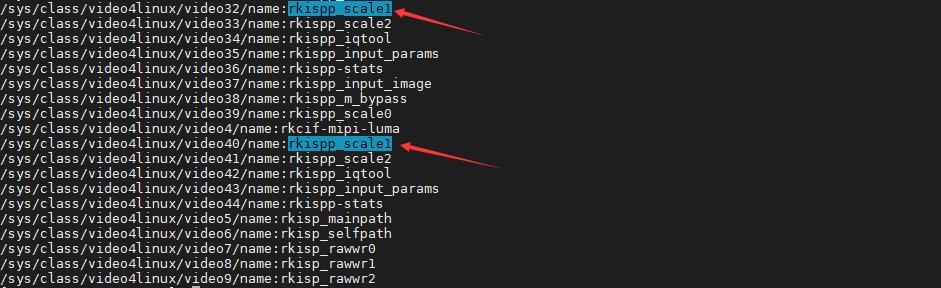
 这里你可能会发现,一个
这里你可能会发现,一个ISP节点有多个video节点的对应关系,其实它们是位于不同的media设备下的,因此在不同的media下所对应的video节点也是不同的。
其中,冒号前面的一部分表示video节点,冒号后面一部分就是ISP节点:
 如上所示,video节点为:
如上所示,video节点为:
/sys/class/video4linux/v4l-subdev0/name
ISP节点为:
rkispp-subdev
1.3.2、通过media-ctl获取拓扑信息
我们可以通过media-ctl获取拓扑信息,然后找到相应的数据通路,分别输入以下指令:
media-ctl -p -d /dev/media0
media-ctl -p -d /dev/media1
media-ctl -p -d /dev/media2
media-ctl -p -d /dev/media3
然后我们就可以找到ISP20输出的四路数据的信息了:
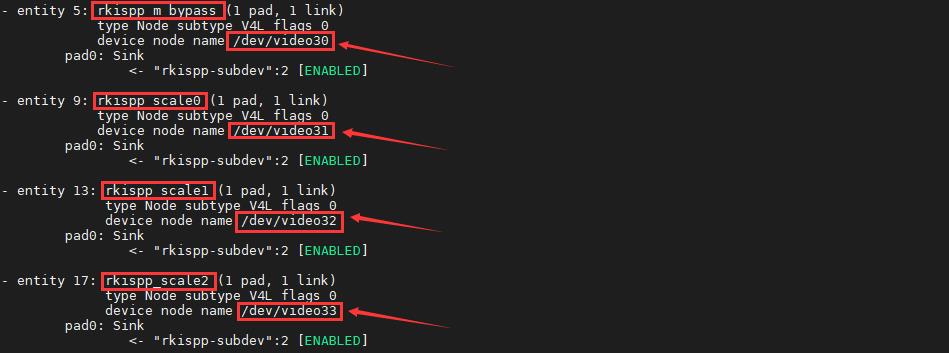 也就是说,我们在应用程序中只需要去操作:
也就是说,我们在应用程序中只需要去操作:
/dev/video30 或 rkispp_m_bypass
/dev/video31 或 rkispp_scale0
/dev/video32 或 rkispp_scale1
/dev/video33 或 rkispp_scale2
就可以对摄像头进行驱动了,另外:
rkispp_m_bypass这路数据流比较特殊,其不支持设置分辨率,其输出分辨率由ISP输入的分辨率决定,可以通过media-ctl查看拓扑结构确定ISP输入的分辨率:
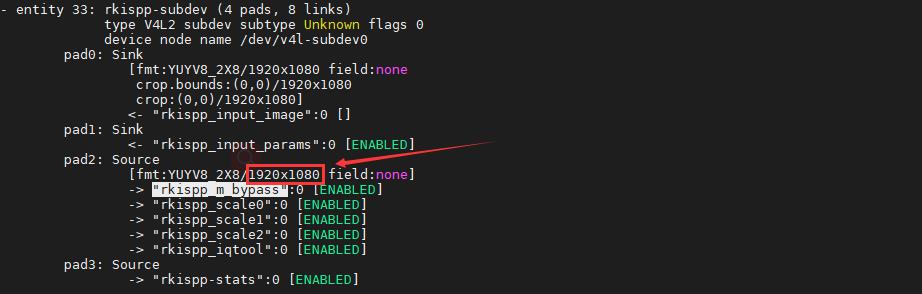 如上所示,rkispp_m_bypass这路输出的分辨率为1920x1080。
如上所示,rkispp_m_bypass这路输出的分辨率为1920x1080。
其它三路数据:rkispp_scale0、rkispp_scale1、rkispp_scale2节点支持缩放,每一路支持的最大分辨率如下所示:
| 节点名称 | 视频设备ID | 最大支持宽度 | 支持输出格式 |
|---|---|---|---|
| rkispp_m_bypass | /dev/video30 | 不支持设置分辨率,不支持缩放 | NV12/NV16/YUYV/FBC0/FBC2/ |
| rkispp_scale0 | /dev/video31 | max width: 3264,最大支持8倍缩放 | NV12/NV16/YUYV |
| rkispp_scale1 | /dev/video32 | max width: 1280,最大支持8倍缩放 | NV12/NV16/YUYV |
| rkispp_scale2 | /dev/video33 | max width: 1280,最大支持8倍缩放 | NV12/NV16/YUYV |
video id 节点不是固定的,我的节点也是通过media-ctl查看的。当然我们也可以使用v4l2-ctl来抓图,测试数据是否正常通信。
1.3.3、图像优化调试3A算法
当Sensor输出RAW BAYER RGB格式时,如RGGB,BGGR,GBRG,GRBG等,需要ISP20提供一系列图像处理算法来优化图像效果,此时需要RkAiq模块介入。
SDK提供了一种3A独立进程的方式(ispserver)集成了RkAiq库librkaiq.so,当我们使用RK提供的RKMEDIA进行编程获取据流时,能够得到具有ISP调试效果的图像。
2、RKISP调试
21、查看摄像头sensor驱动的适配情况
我选用的是gc2053这款摄像头,并且在Linux设备树中已经做了相应的支持,故我们可以通过获取内核启动信息来查看摄像头驱动的加载情况,获取方法:
dmesg | grep "gc2053"
我们可以看到如下信息:
 其中,如果能在内核信息中看到以上两行信息:
其中,如果能在内核信息中看到以上两行信息:
[ 0.831096] gc2053 1-0037: Detected GC2053 sensor
[ 0.831201] rockchip-mipi-dphy-rx ff4b0000.csi-dphy: match m00_f_gc2053 1-0037:bus type 4
即表示摄像头已经适配成功了!
2.2、获取驱动版本号
搜索相应的字段:
dmesg | grep "rkisp driver version"
dmesg | grep "rkispp driver version"
如下:
 或者通过以下命令获取:
或者通过以下命令获取:
cat /sys/module/video_rkisp/parameters/version
cat /sys/module/video_rkispp/parameters/version
如下:

2.3、如何判断RKISP驱动加载状态
RKISP驱动如果加载成功,会有video及media设备存在于/dev/目录下。系统中可能存在多个/dev/video设备,通过/sys可以查询到RKISP注册的video节点:
grep '' /sys/class/video4linux/video*/name
查询信息如下:
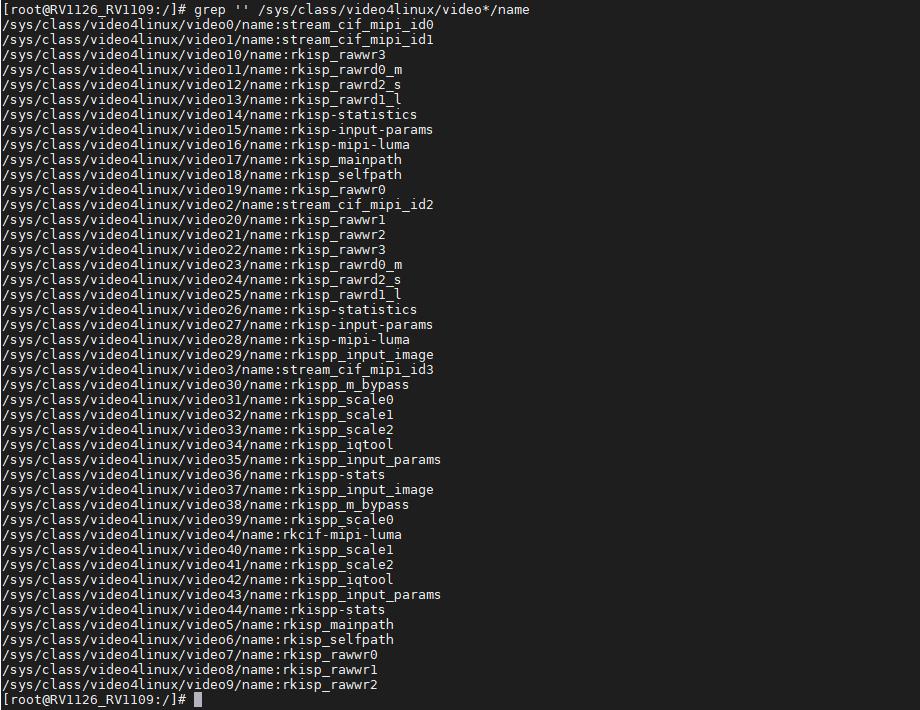 当然也可以通过
当然也可以通过media-ctl命令来打印拓扑结构查看pipeline的状态是否正常,如果RKISP驱动加载成功,则在内核中能看到如下打印:
dmesg | grep Async

如果没有的话,则需要返回到1.1步骤去检查摄像头sensor驱动是否有报错,检测I2C通讯是否正常。
往期精彩
超轻量级网红软件定时器multi_timer(51+stm32双平台实战)
RT-Thread UART设备驱动框架初体验(中断方式接收带\\r\\n的数据)
MCU串口命令解析器的实现TKM32F499评估板串口通信学习与实践笔记
觉得本次分享的文章对您有帮助,随手点[在看]并转发分享,也是对我的支持。
以上是关于Camera知识体系架构之驱动&应用&调试学习笔记-以瑞芯微RV1109为例的主要内容,如果未能解决你的问题,请参考以下文章