示例:PX4——添加msguORB
Posted XXX_UUU_XXX
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了示例:PX4——添加msguORB相关的知识,希望对你有一定的参考价值。
git clone https://github.com/PX4/Firmware
cd Firmware
git submodule update --init --recursive
git checkout v1.11.0-beta1
make distclean
在Firmware/msg/目录下添加文件test_tof.msg,内容如下
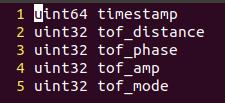
uint64 timestamp
uint32 tof_distance
uint32 tof_phase
uint32 tof_amp
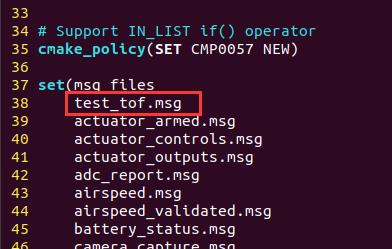
uint16 tof_mode在Firmware/msg/CMakeLists.txt中添加一行
test_tof.msg
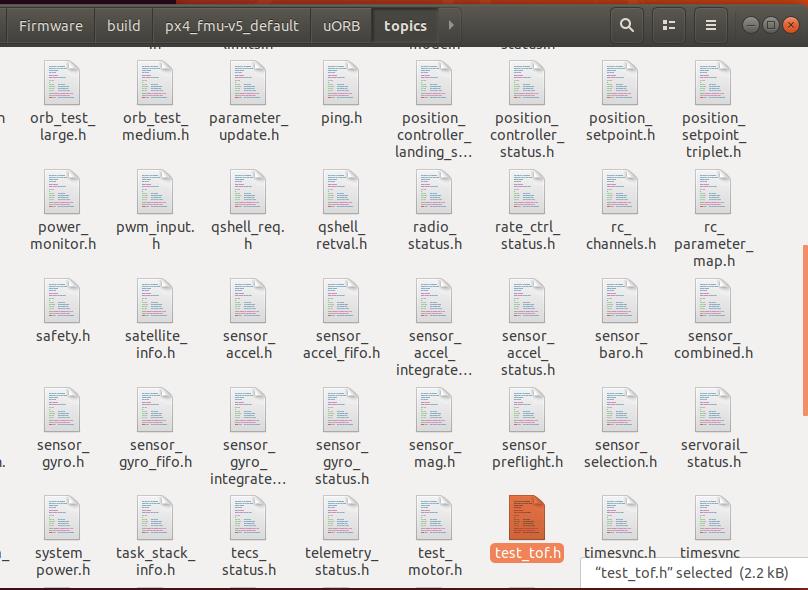
在Firmware目录下编译
make px4_fmu-v5_default
在Firmware/build/px4_fmu-v5_default/uORB/topics/目录下生成test_tof.h文件
发布订阅代码参考Firmware/src/examples/px4_simple_app
/**
* @file px4_simple_app.c
* Minimal application example for PX4 autopilot
*
* @author Example User <mail@example.com>
*/
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/tasks.h>
#include <px4_platform_common/posix.h>
#include <unistd.h>
#include <stdio.h>
#include <poll.h>
#include <string.h>
#include <math.h>
#include <uORB/uORB.h>
#include <uORB/topics/sensor_combined.h>
#include <uORB/topics/vehicle_attitude.h>
__EXPORT int px4_simple_app_main(int argc, char *argv[]);
int px4_simple_app_main(int argc, char *argv[])
{
PX4_INFO("Hello Sky!");
/* subscribe to sensor_combined topic */
int sensor_sub_fd = orb_subscribe(ORB_ID(sensor_combined));
/* limit the update rate to 5 Hz */
orb_set_interval(sensor_sub_fd, 200);
/* advertise attitude topic */
struct vehicle_attitude_s att;
memset(&att, 0, sizeof(att));
orb_advert_t att_pub = orb_advertise(ORB_ID(vehicle_attitude), &att);
/* one could wait for multiple topics with this technique, just using one here */
px4_pollfd_struct_t fds[] = {
{ .fd = sensor_sub_fd, .events = POLLIN },
/* there could be more file descriptors here, in the form like:
* { .fd = other_sub_fd, .events = POLLIN },
*/
};
int error_counter = 0;
for (int i = 0; i < 5; i++) {
/* wait for sensor update of 1 file descriptor for 1000 ms (1 second) */
int poll_ret = px4_poll(fds, 1, 1000);
/* handle the poll result */
if (poll_ret == 0) {
/* this means none of our providers is giving us data */
PX4_ERR("Got no data within a second");
} else if (poll_ret < 0) {
/* this is seriously bad - should be an emergency */
if (error_counter < 10 || error_counter % 50 == 0) {
/* use a counter to prevent flooding (and slowing us down) */
PX4_ERR("ERROR return value from poll(): %d", poll_ret);
}
error_counter++;
} else {
if (fds[0].revents & POLLIN) {
/* obtained data for the first file descriptor */
struct sensor_combined_s raw;
/* copy sensors raw data into local buffer */
orb_copy(ORB_ID(sensor_combined), sensor_sub_fd, &raw);
PX4_INFO("Accelerometer:\\t%8.4f\\t%8.4f\\t%8.4f",
(double)raw.accelerometer_m_s2[0],
(double)raw.accelerometer_m_s2[1],
(double)raw.accelerometer_m_s2[2]);
/* set att and publish this information for other apps
the following does not have any meaning, it's just an example
*/
att.q[0] = raw.accelerometer_m_s2[0];
att.q[1] = raw.accelerometer_m_s2[1];
att.q[2] = raw.accelerometer_m_s2[2];
orb_publish(ORB_ID(vehicle_attitude), att_pub, &att);
}
/* there could be more file descriptors here, in the form like:
* if (fds[1..n].revents & POLLIN) {}
*/
}
}
PX4_INFO("exiting");
return 0;
}在Firmware/src/modules/目录下创建test_tof文件夹(发布订阅实例),并在其中创建test_tof.c和CMakeLists.txt文件
/**
* @file px4_simple_app.c
* Minimal application example for PX4 autopilot
*
* @author Example User <mail@example.com>
*/
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/tasks.h>
#include <px4_platform_common/posix.h>
#include <unistd.h>
#include <stdio.h>
#include <poll.h>
#include <string.h>
/* 添加要是用的topics , test_tof*/
#include <uORB/uORB.h>
#include <../build/px4_fmu-v5_default/uORB/topics/test_tof.h>
__EXPORT int test_tof_main(int argc, char *argv[]);
int test_tof_main(int argc, char *argv[])
{
PX4_INFO("Init Tof !!!");
/* 定义两个test_tof_s 数据结构体,tof用于发布数据,tof_copy用于订阅后复制数据 */
struct test_tof_s tof;
struct test_tof_s tof_copy;
memset(&tof, 0, sizeof(tof));
/ * 公告一个消息,目的是发布这个消息 */
orb_advert_t tof_pub = orb_advertise(ORB_ID(test_tof), &tof);
/* 对数据进行虚假赋值*/
tof.tof_amp = 100;
tof.tof_distance = 200;
tof.tof_phase = 300;
/*发送数据*/
orb_publish(ORB_ID(test_tof),tof_pub,&tof);
/* subscribe to sensor_combined topic(订阅一个消息ID) */
int sensor_tof_fd = orb_subscribe(ORB_ID(test_tof));
/* limit the update rate to 5 Hz */
//设置sensor_combined消息的订阅时间间隔200毫秒一次
orb_set_interval(sensor_tof_fd, 200);
/* 将数据copy到新的结构体中进行验证*/
orb_copy(ORB_ID(test_tof),sensor_tof_fd,&tof_copy);
/* 打印数据进行验证*/
PX4_INFO("[px4_tof] amp %d, distance %d ,phase %d\\r\\n", tof_copy.tof_amp,tof_copy.tof_distance,tof_copy.tof_phase);
PX4_INFO("exiting");
return 0;
}
px4_add_module(
MODULE tof__px4_tof_app
MAIN px4_tof_app
SRCS
px4_tof_app.c
DEPENDS
)在Firmware/boards/px4/fmu-v5/default.cmake中的MODULES中添加test_tof
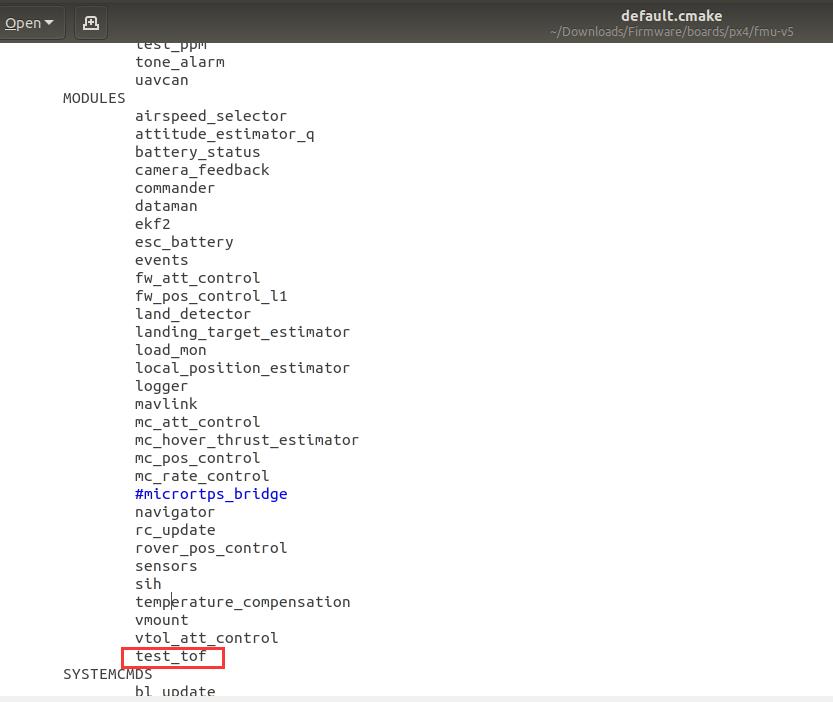
然后编译/下载
make px4_fmu-v5_default upload
以上是关于示例:PX4——添加msguORB的主要内容,如果未能解决你的问题,请参考以下文章