基于OMPAL138 +FPGA异构多核运动控制器的设计
Posted 专注DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于OMPAL138 +FPGA异构多核运动控制器的设计相关的知识,希望对你有一定的参考价值。
针对传统运动控制器稳定性差、控制效率低、软件构架不完善等特点,结合异构多核技术的优势,提出并开发一种异构多核处理器运动控制器。文章详细阐明该系统硬件设计和软件设计,硬件设计主要说明以异构多核处理器OMAPL138为核心,FPGA为扩展的系统构架;软件设计借助于不同指令集操作系统,利用Sys Link完成多系统平台通信。结合运动控制器的特性,提出异构多核任务调度策略。分析异构多核通信Sys Link的Notify和List MP组件特点,将任务调度策略各条规则,封装到List MP表头,通过查表法实现任务调度策略。通过实验表明,该运动控制器具有较好的实时性和稳定性。

通过分析基于PC机的数控系统及嵌入式数控系统架构存在的局限性,结合开放式数控系统的功能需求,设计了一个具有工业以太网功能的模块化嵌入式可重构计算机数控(CNC)系统.该系统改进了传统的基于ARM+DSP+FPGA的嵌入式系统设计架构,并扩展了工业以太网功能模块.在此基础上构建了系统硬件平台,给出了系统硬件构成及系统软件实现.该系统中央数字控制单元不再是一个通用的单CPU系统,而是一个嵌入式多CPU系统,不但运算能力强、结构灵活、成本低廉,而且具有通用性强、可组合、易扩展、可伸缩和开放性等特点.
1 评估板简介
基于TI OMAP-L138(定点/浮点 DSP C674x+ARM9)+ Xilinx Spartan-6 FPGA处理器;
OMAP-L138 FPGA 通过uPP、EMIFA、I2C总线连接,通信速度可高达 228MByte/s;OMAP-L138主频456MHz,高达3648MIPS和2746MFLOPS的运算能力;
FPGA 兼容 Xilinx Spartan-6 XC6SLX9/16/25/45,平台升级能力强;
开发板引出丰富的外设,包含千兆网口、SATA、EMIFA、uPP、USB 2.0 等高速数据传输接口,同时也引出 GPIO、I2C、RS232、PWM、McBSP 等常见接口;
通过高低温测试认证,适合各种恶劣的工作环境;
DSP+ARM+FPGA三核核心板,尺寸为 66mm*38.6mm,采用工业级B2B连接器,保证信号完整性; Ø
支持裸机、SYS/Bios 操作系统、Linux 操作系统。

图1 开发板正面和侧视图
XM138F-IDK-V3.0 是一款基于深圳信迈XM138-SP6-SOM核心板设计的开发板,采用沉金无铅工艺的4层板设计,它为用户提供了 XM138-SP6-SOM核心板的测试平台,用于快速评估XM138-SP6-SOM核心板的整体性能。
XM138-SP6-SOM引出CPU全部资源信号引脚,二次开发极其容易,客户只需要专注上层应用,大大降低了开发难度和时间成本,让产品快速上市,及时抢占市场先机。不仅提供丰富的 Demo 程序,还提供详细的开发教程,全面的技术支持,协助客户进行底板设计、调试以及软件开发。
2 典型运用领域
数据采集处理显示系统
智能电力系统
图像处理设备
高精度仪器仪表
中高端数控系统
通信设备
音视频数据处理

图2 典型应用领域
3 软硬件参数
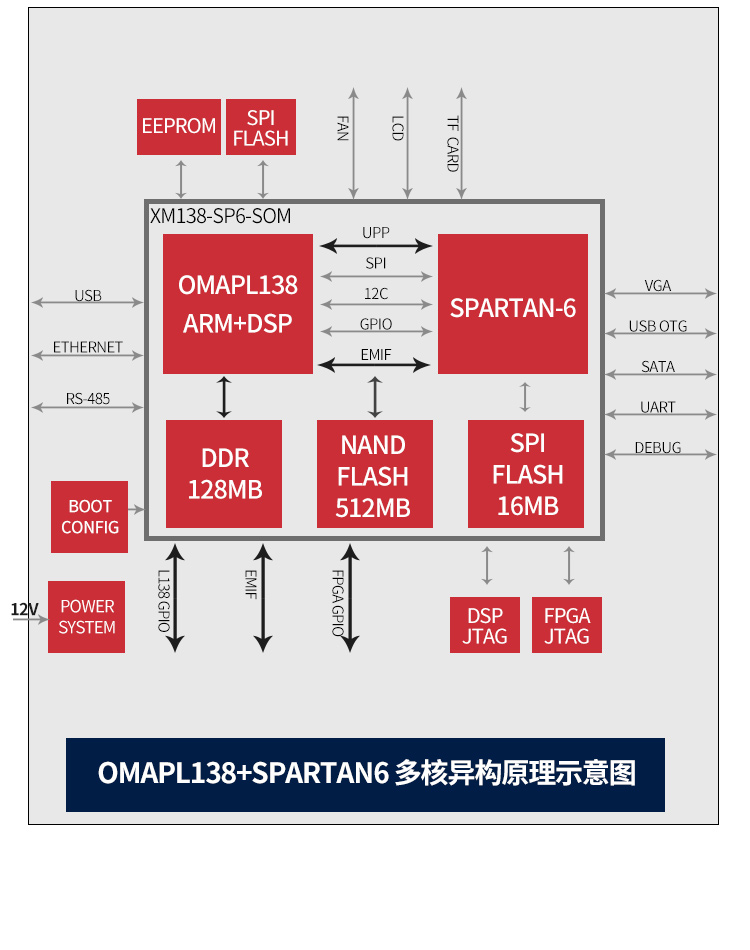
开发板外设资源框图示意图
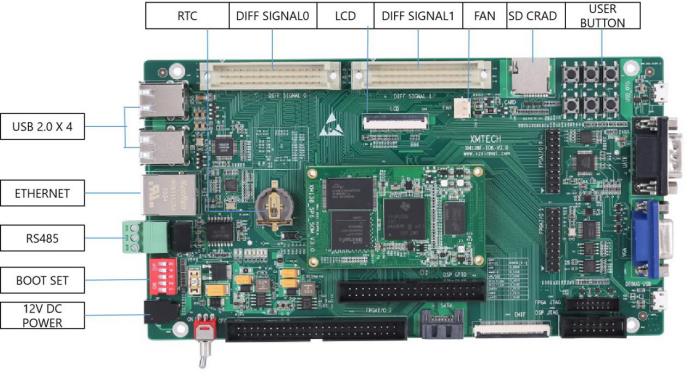
图3 开发板接口示意图
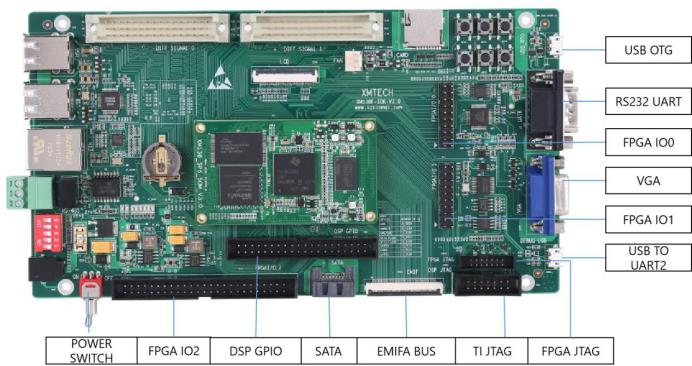
图4 开发板接口示意图
以上是关于基于OMPAL138 +FPGA异构多核运动控制器的设计的主要内容,如果未能解决你的问题,请参考以下文章
基于OMAPL138+FPGA核心板多核软件开发组件MCSDK开发入门(上)
基于OMAPL138 + FPGA嵌入式喷涂机器人控制器的设计