无人机学习Pix4
Posted XXX_UUU_XXX
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了无人机学习Pix4相关的知识,希望对你有一定的参考价值。
pix4学习
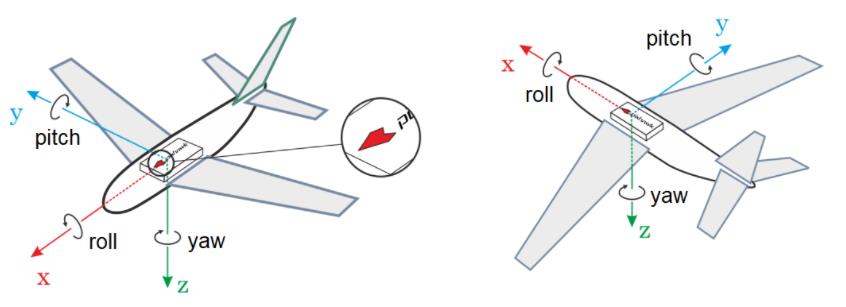
IMU(惯性测量单元)
IMU用来检测当前飞机的姿态,飞控根据当前姿态做出调整,保证飞机飞行稳定。
- 俯仰角——pitch(前后翻滚)
- 横滚角——roll(左右翻滚)
- 偏航角——yaw(左右移动)
IMU一般包括:
- 陀螺仪
- 磁力计
- 加速度计
陀螺仪:有积分漂移,导致偏差大,需要磁力计和加速度计校准。
磁力计:靠近磁场会报错,
加速度计:对震动敏感,需要对飞控做减震措施。
飞机静止不动时,陀螺仪没有角速度,磁力计指向一个固定的方向,加速度计为0,
PX4 无人机通常由锂聚合物(LiPo)电池供电。
PX4 可以通过串行接线或 WiFi 由独立的机载伴飞计算机进行控制。 机载计算机通常使用 MAVLink API(如 MAVSDK 或 MAVROS)进行通信。
Pixhawk 飞控板支持的最大 SD 卡大小为 32 GB 。PX4 使用 SD 储存卡存储 飞行日志,而且还需要内存卡才能使用 UAVCAN 外围设备,运行飞行任务。
所有车辆,船只和飞机都具有航向(机头朝向)或基于其前进运动的方向。



安装方向
基本上所有的飞控都会标示指向箭头(如下图所示)。 飞控应该顶部朝上安装在机架上,并使箭头指向与载具的前向一致

带有内置加速度计或陀螺仪的飞行控制板对振动很敏感。一些板包括内置的隔振器,而另一些板带有安装泡沫,您可以使用它来将控制器与车辆隔离。
Pixhawk 4接线

Pixhawk 4应使用减震泡沫垫(包含在套件中)安装在框架上。其位置应尽可能靠近车辆的重心,顶部朝上,箭头指向车辆前部。

将提供的带有集成罗盘、安全开关、蜂鸣器和 LED 的GPS连接到GPS MODULE端口。
GPS/指南针应安装在框架上,尽可能远离其他电子设备,方向标记朝向车辆前方(将指南针与其他电子设备分开会减少干扰)。

使用 6 线电缆将套件随附的电源管理板(PM 板)的输出连接到Pixhawk 4的电源块之一。PM 输入2~12S将连接到您的 LiPo 电池。电源管理板的连接,包括电调和舵机的电源和信号连接,如下表所示。请注意,PM 板不通过FMU PWM-OUT 的+ 和 - 引脚为舵机供电。

手动控制车辆,则需要遥控 (RC) 无线电系统(PX4 不需要用于自主飞行模式的无线电系统)。


数传电台遥测无线电可用于从地面站通信和控制飞行中的车辆(例如,您可以将无人机引导到特定位置,或上传新任务)。
车载电台应如下图所示连接到TELEM1端口(如果连接到此端口,则无需进一步配置)。另一个无线电连接到您的地面站计算机或移动设备(通常通过 USB)。


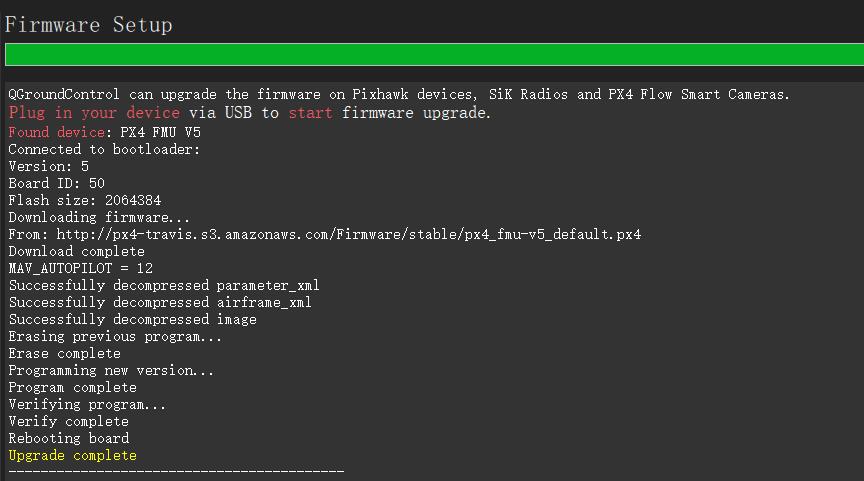
安装稳定的PX4版本
首先在顶部工具栏中选择 齿轮 图标 (Vehicle Setup) ,然后在侧边栏中选择 Firmware 。
通过 USB 将飞行控制器直接连接到您的计算机。直接连接到机器上有源 USB 端口(不要通过 USB 集线器连接)。
选择 PX4 飞行栈 X.x.x Release 为您的硬件(自动检测)安装最新版的PX4。
点击 OK 按钮开始更新固件。
然后,固件将进行一系列升级步骤 (下载新固件,删除旧固件等)。 每个步骤都打印到屏幕上,整个进度显示在进度条上。
设置机架类型
机架设置步骤如下:
-
打开 QGroundControl 并连接上飞机。
-
在工具栏上选择齿轮图标 (载具设置),然后在侧边栏选择 机架。
-
先选择你的机架符合的大致分类,然后在下拉菜单中选择最匹配的机架类型。
-
点击 应用并重启。 看到提示后点击 应用 保存设置并重启载具 (飞机)。

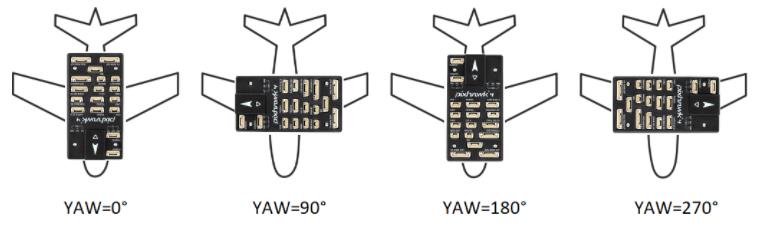
设置朝向
要设置方向:
-
打开 QGroundControl 并连接上飞机。
-
在工具栏选择 齿轮 图标 (机体设置),然后在侧边栏选择 传感器。
-
选择 Set Orientations 按钮。
-
选择 自驾仪方向(AutoPilot Orientation)
-
同样的选择 外置罗盘方向(External Compass Orientation)(只有当您的飞行器有外部罗盘时,才会显示此选项)。
-
点击 OK。

罗盘校准
校准步骤如下:
-
选择远离大型金属物体或磁场的位置。避免在办公桌顶部(通常包含金属条)或车辆旁边进行校准。如果您站在钢筋分布不均的混凝土板上,校准甚至会受到影响。
-
打开 QGroundControl 并连接上飞机。
-
在工具栏选择 齿轮 图标(机体设置),然后在侧边栏选择 传感器。
-
点击 Compass 传感器按钮。
-
点击确定开始校准。
-
把你的飞机放置在下面显示的某一个方向,并保持静止。 随后提示(方向图像变为黄色)在指定方向旋转飞行器。 该位置标定完成后,屏幕上的相应图示将变成绿色。
-
在机体的所有方向上重复校准步骤。

陀螺仪校准
标定步骤如下:
-
单击陀螺仪传感器按钮
-
将车辆放在一个表面上并保持静止。
-
单击确定开始校准。
-
完成后,QGroundControl会显示一个进度条Calibration complete

加速度计校准
校准步骤如下:
-
打开 QGroundControl 并连接上飞机。
-
在工具栏选择 齿轮 图标(机体设置),然后在侧边栏选择 传感器。
-
点击 加速度计 传感器按钮。
-
点击确定开始校准。
-
按照屏幕上的图示引导,将机体翻转到指定位置。 看到 (图示位置变成黄色) 的提示,握紧机体并保持静止。 该位置标定完成后,屏幕上的相应图示将变成绿色。
-
在机体的所有方向上重复校准步骤。

水平平面校准
要调平地平线:
- 打开 QGroundControl 并连接上飞机。
- 在工具栏选择 齿轮 图标 (机体设置),然后在侧边栏选择 传感器。
- 点击 Level Horizon 按钮。
- 将飞行器放置于水平方向:
- 这是飞行器在水平飞行时的位置(飞行器通常会向上轻微翘起!)
- 对于旋翼机,这是悬停位置。
- 点击 OK 开始校准。
- 等待校准过程结束。

多旋翼 PID 调整
控制器是分层的,这意味着较高级别的控制器将其结果传递给较低级别的控制器。最底层的控制器是速率控制器,其次是姿态控制器,最后是速度和位置控制器。PID 调整需要按照相同的顺序完成,从速率控制器开始,因为它会影响所有其他控制器。
每个控制器(速率、姿态、速度/位置)和轴(偏航、滚转、俯仰)的测试程序始终相同:通过非常快速地移动操纵杆并观察响应来创建快速设置点变化。然后调整滑块(如下所述)以改进对设定点响应的跟踪。
- 速率控制器调整是最重要的,如果调整好,其他控制器通常不需要或只需要微调
- 通常,相同的调谐增益可用于横滚和俯仰。
- 使用 Acro/Stabilized/Altitude 模式来调整速率控制器
- 使用位置模式调整速度控制器和位置控制器。确保切换到简单位置控制模式,以便您可以生成阶跃输入。

机架组装
DJI F450
https://docs.px4.io/master/zh/frames_multicopter/dji_f450_cuav_5plus.html
以上是关于无人机学习Pix4的主要内容,如果未能解决你的问题,请参考以下文章
Pix4Dmapper无人机航测之3D数据处理工作站硬件配置方案