matlab无人机UAV农药喷洒路径优化matlab优化算法十七
Posted 张叔zhangshu
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了matlab无人机UAV农药喷洒路径优化matlab优化算法十七相关的知识,希望对你有一定的参考价值。
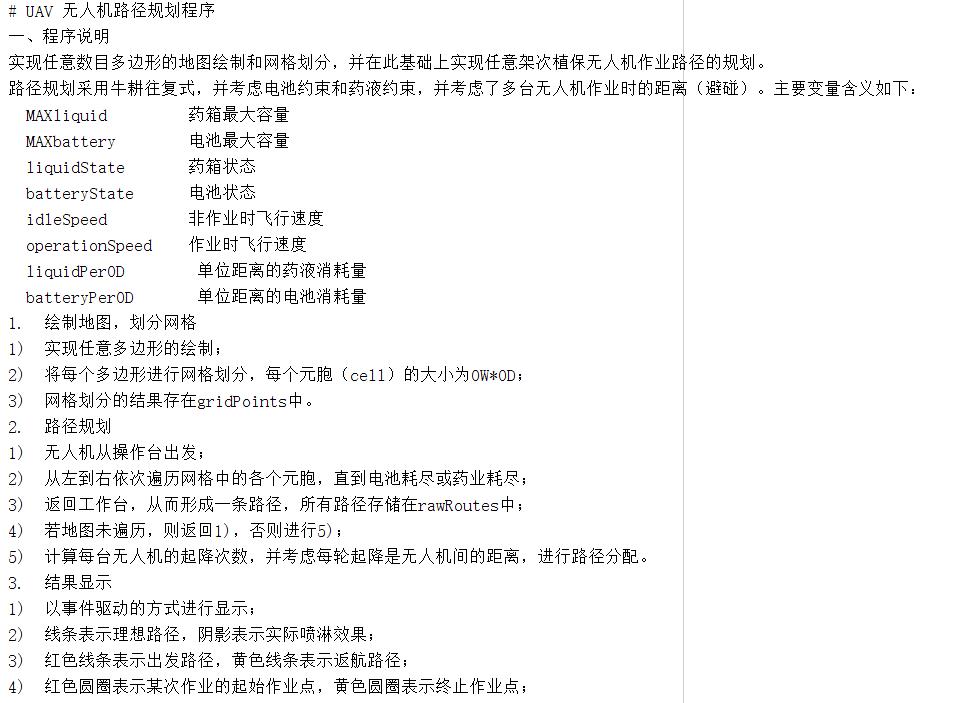
无人机路径规划程序
function rawRoutes=UAV2(amount)
clc
close all
%% name space
% MAXliquid 药箱最大容量
% MAXbattery 电池最大容量
% liquidState 药箱状态
% batteryState 电池状态
% idleSpeed 非作业时飞行速度
% operationSpeed 作业时飞行速度
% liquidPerOD 单位距离的药液消耗量
% batteryPerOD 单位距离的电池消耗量
%%
global OW OD MAXliquid MAXbattery
global idleSpeed operationSpeed liquidPerOD batteryPerOD;
OW = 0.02;
OD = 0.02;
MAXliquid = 3;
MAXbattery =3;
idleSpeed = 0.3;
operationSpeed = 0.2;
liquidPerOD = OD*1;
batteryPerOD = OD*1;
if nargin < 1
amount =4;
end
%% 绘制地图
origin=[-1,0];
gridPoints = [];
fill([-0.1 0.1 0.1 -0.1 ]*0.2-0.98,[0.2 0.2 0 0]*0.2,'black');
%顺时针输入区域的横坐标和纵坐标
xv=[0.2 0.5 0.6 0.1];
yv=[0.7 0.8 0.3 0.4];
gridPoints = addPatch(xv,yv,gridPoints);
xv=[-0.8 -0.7 -0.3 -0.2 -0.5];
yv=[0.25 0.7 0.6 0.3 0.2];
gridPoints = addPatch(xv,yv,gridPoints);
%xv=[0.8 0.95 0.85 0.7];
%yv=[0.8 0.7 0.6 0.7];
%gridPoints = addPatch(xv,yv,gridPoints);
disp('请按任意键开始运行...')
pause;
%% 规划路径
matrixRoutes = routesPlanning(gridPoints,amount)
matrixRoutes = reshape(matrixRoutes,prod(size(matrixRoutes)),1);
minDis=inf;
for ii= 1:length(matrixRoutes)
if ~isempty(matrixRoutes{ii})
rawRoutes{ii}=matrixRoutes{ii};
end
end
len = length(rawRoutes);
C=ceil(len/amount);
F=floor(len/amount);
for ii=1:amount
if ii<=len-F*amount
Numbering{ii}=(ii-1)*C+1:ii*C;
else
S=(len-F*amount)*C+(ii-1-(len-F*amount))*F;
Numbering{ii}=S+1:S+F;
end
end
%% 结果显示
hold on
FPS=0;
for i=1:C
title(['第' num2str(i) '轮飞行']);
len=0;
for j=1:amount
Vj=Numbering{j};
if length(Vj)>=i &&len<size(rawRoutes{Vj(i)},1)
len =size(rawRoutes{Vj(i)},1);
end
end
for k=1:len
FPS=FPS+1;
%disp(['FPS:' num2str(FPS)])
for j=1:amount
Vj=Numbering{j};
if length(Vj)>=i
currentRoute = rawRoutes{Vj(i)};
else
continue;
end
% if k == 1
% plot(currentRoute(2,1),currentRoute(2,2),'ro','LineWidth',2);
% plot(currentRoute(1:2,1),currentRoute(1:2,2),'b','LineWidth',1.5);
% continue;
% elseif k == length(currentRoute)
% plot(currentRoute(end-1:end,1),currentRoute(end-1:end,2),'y','LineWidth',1.5);
% plot(currentRoute(end-1,1),currentRoute(end-1,2),'rx','LineWidth',3);
% continue;
% elseif k > length(currentRoute)
% continue;
% else
% plot(currentRoute(k:k+1,1),currentRoute(k:k+1,2),'-b');
% end
num = ceil(size(currentRoute,1)/len*k);
if num < 1 || num > size(currentRoute,1)
continue;
elseif num==1
plot(currentRoute(2,1),currentRoute(2,2),'ro','LineWidth',2);
plot(currentRoute(1:2,1),currentRoute(1:2,2),'b','LineWidth',1.5);
continue;
elseif num+1 < size(currentRoute,1)
plot(currentRoute(num:num+1,1),currentRoute(num:num+1,2),'-b');
else
plot(currentRoute(end-1:end,1),currentRoute(end-1:end,2),'y','LineWidth',1.5);
plot(currentRoute(end-1,1),currentRoute(end-1,2),'rx','LineWidth',3);
continue;
%pause(0.2);
end
x0=currentRoute(num,1);
y0=currentRoute(num,2);
rgbj=j/amount;
fill([x0-OW/2 x0+OW/2 x0+OW/2 x0-OW/2]+rand*0.2*OW,[y0+OD/2 y0+OD/2 y0-OD/2 y0-OD/2]+rand*0.2*OD,[rgbj,rgbj,0],'edgealpha',0)
%fill([x0-OW/2 x0+OW/2 x0+OW/2 x0-OW/2],[y0+OD/2 y0+OD/2 y0-OD/2 y0-OD/2],[rgbj,rgbj,0],'edgealpha',0)
%plot(currentRoute(num,1),currentRoute(num,2),'o-','color',[i/size(Routes,1),0,0]);
end
getframe;
%m(FPS)=getframe;
end
pause(1);
end
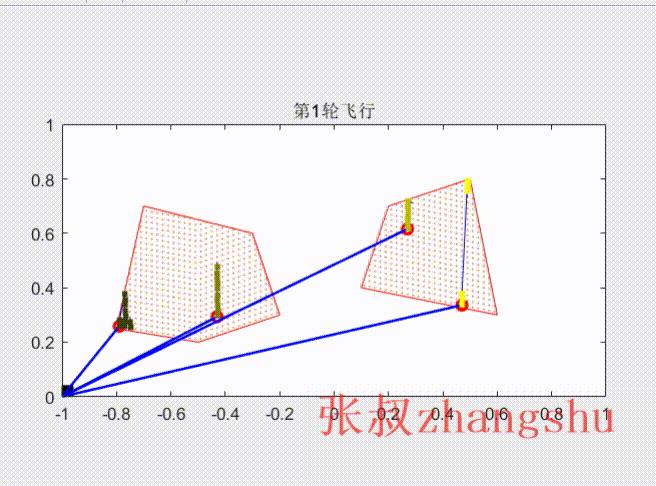
结果展示
代码下载链接
以上是关于matlab无人机UAV农药喷洒路径优化matlab优化算法十七的主要内容,如果未能解决你的问题,请参考以下文章