完善虚拟的I2C\_Adapter驱动并模拟EEPROM
Posted 韦东山
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了完善虚拟的I2C\_Adapter驱动并模拟EEPROM相关的知识,希望对你有一定的参考价值。
完善虚拟的I2C_Adapter驱动并模拟EEPROM
参考资料:
-
Linux内核文档:
Linux-4.9.88\\Documentation\\devicetree\\bindings\\i2c\\i2c-gpio.txtLinux-5.4\\Documentation\\devicetree\\bindings\\i2c\\i2c-gpio.yaml
-
Linux内核驱动程序:使用GPIO模拟I2C
Linux-4.9.88\\drivers\\i2c\\busses\\i2c-gpio.cLinux-5.4\\drivers\\i2c\\busses\\i2c-gpio.c
-
Linux内核真正的I2C控制器驱动程序
- IMX6ULL:
Linux-4.9.88\\drivers\\i2c\\busses\\i2c-imx.c
- IMX6ULL:
-
STM32MP157:
Linux-5.4\\drivers\\i2c\\busses\\i2c-stm32f7.c -
本节视频的代码在GIT仓库里
- IMX6ULL:
doc_and_source_for_drivers\\IMX6ULL\\source\\04_I2C\\06_i2c_adapter_virtual_ok - STM32MP157:
doc_and_source_for_drivers\\STM32MP157\\source\\A7\\04_I2C\\06_i2c_adapter_virtual_ok
- IMX6ULL:
1. 实现master_xfer函数
在虚拟的I2C_Adapter驱动程序里,只要实现了其中的master_xfer函数,这个I2C Adapter就可以使用了。
在master_xfer函数里,我们模拟一个EEPROM,思路如下:
- 分配一个512自己的buffer,表示EEPROM
- 对于slave address为0x50的i2c_msg,解析并处理
- 对于写:把i2c_msg的数据写入buffer
- 对于读:从buffer中把数据写入i2c_msg
- 对于slave address为其他值的i2c_msg,返回错误
2. 编程
看视频
3. 上机实验
3.1 设置工具链
-
IMX6ULL
export ARCH=arm export CROSS_COMPILE=arm-linux-gnueabihf- export PATH=$PATH:/home/book/100ask_imx6ull-sdk/ToolChain/gcc-linaro-6.2.1-2016.11-x86_64_arm-linux-gnueabihf/bin -
STM32MP157
注意:对于STM32MP157,以前说编译内核/驱动、编译APP的工具链不一样,其实编译APP用的工具链也能用来编译内核。export ARCH=arm export CROSS_COMPILE=arm-buildroot-linux-gnueabihf- export PATH=$PATH:/home/book/100ask_stm32mp157_pro-sdk/ToolChain/arm-buildroot-linux-gnueabihf_sdk-buildroot/bin
3.2 编译、替换设备树
在设备树根节点下,添加如下代码:
i2c-bus-virtual {
compatible = "100ask,i2c-bus-virtual";
};
1. STM32MP157
-
修改
arch/arm/boot/dts/stm32mp157c-100ask-512d-lcd-v1.dts,添加如下代码:/ { i2c-bus-virtual { compatible = "100ask,i2c-bus-virtual"; }; }; -
编译设备树:
在Ubuntu的STM32MP157内核目录下执行如下命令,
得到设备树文件:arch/arm/boot/dts/stm32mp157c-100ask-512d-lcd-v1.dtbmake dtbs -
复制到NFS目录:
$ cp arch/arm/boot/dts/stm32mp157c-100ask-512d-lcd-v1.dtb ~/nfs_rootfs/ -
开发板上挂载NFS文件系统
-
vmware使用NAT(假设windowsIP为192.168.1.100)
[root@100ask:~]# mount -t nfs -o nolock,vers=3,port=2049,mountport=9999 192.168.1.100:/home/book/nfs_rootfs /mnt -
vmware使用桥接,或者不使用vmware而是直接使用服务器:假设Ubuntu IP为192.168.1.137
[root@100ask:~]# mount -t nfs -o nolock,vers=3 192.168.1.137:/home/book/nfs_rootfs /mnt
-
-
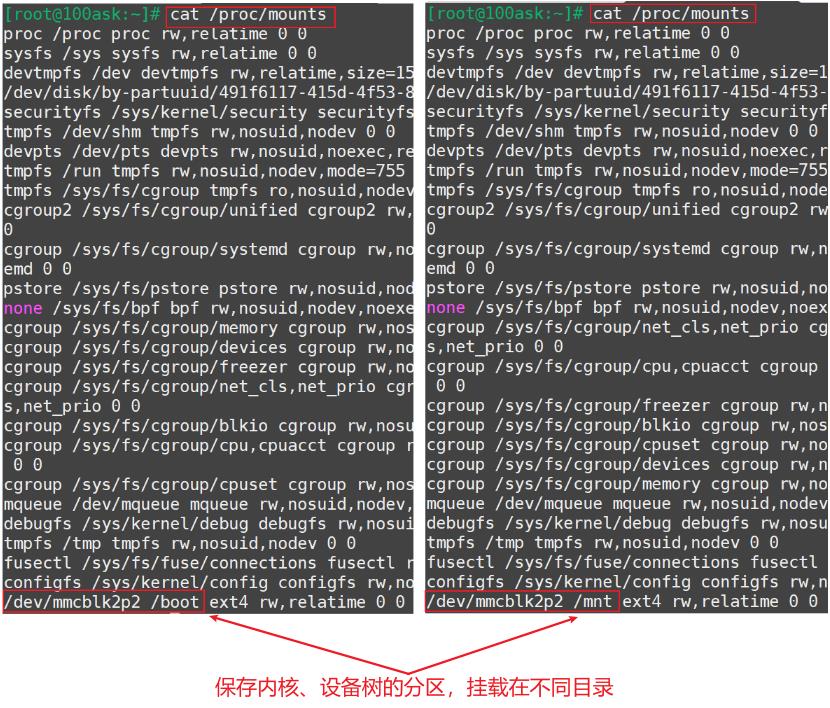
确定设备树分区挂载在哪里
由于版本变化,STM32MP157单板上烧录的系统可能有细微差别。
在开发板上执行cat /proc/mounts后,可以得到两种结果(见下图):-
mmcblk2p2分区挂载在/boot目录下(下图左边):无需特殊操作,下面把文件复制到/boot目录即可
-
mmcblk2p2挂载在/mnt目录下(下图右边)
- 在视频里、后面文档里,都是更新/boot目录下的文件,所以要先执行以下命令重新挂载:
mount /dev/mmcblk2p2 /boot
- 在视频里、后面文档里,都是更新/boot目录下的文件,所以要先执行以下命令重新挂载:
-
-
更新设备树
[root@100ask:~]# cp /mnt/stm32mp157c-100ask-512d-lcd-v1.dtb /boot [root@100ask:~]# sync -
重启开发板
2. IMX6ULL
-
修改
arch/arm/boot/dts/100ask_imx6ull-14x14.dts,添加如下代码:/ { i2c-bus-virtual { compatible = "100ask,i2c-bus-virtual"; }; }; -
编译设备树:
在Ubuntu的IMX6ULL内核目录下执行如下命令,
得到设备树文件:arch/arm/boot/dts/100ask_imx6ull-14x14.dtbmake dtbs -
复制到NFS目录:
$ cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs/ -
开发板上挂载NFS文件系统
-
vmware使用NAT(假设windowsIP为192.168.1.100)
[root@100ask:~]# mount -t nfs -o nolock,vers=3,port=2049,mountport=9999 192.168.1.100:/home/book/nfs_rootfs /mnt -
vmware使用桥接,或者不使用vmware而是直接使用服务器:假设Ubuntu IP为192.168.1.137
[root@100ask:~]# mount -t nfs -o nolock,vers=3 192.168.1.137:/home/book/nfs_rootfs /mnt -
更新设备树
[root@100ask:~]# cp /mnt/100ask_imx6ull-14x14.dtb /boot [root@100ask:~]# sync
-
-
重启开发板
3.4 编译、安装驱动程序
-
编译:
- 在Ubuntu上
- 修改
06_i2c_adapter_virtual_ok中的Makefile,指定内核路径KERN_DIR,在执行make命令即可。
-
安装:
-
在开发板上
-
挂载NFS,复制文件,insmod,类似如下命令:
mount -t nfs -o nolock,vers=3 192.168.1.137:/home/book/nfs_rootfs /mnt // 对于IMX6ULL,想看到驱动打印信息,需要先执行 echo "7 4 1 7" > /proc/sys/kernel/printk insmod /mnt/i2c_adapter_drv.ko
-
3.5 使用i2c-tools测试
在开发板上执行,命令如下:
-
列出I2C总线
i2cdetect -l结果类似下列的信息:
i2c-1 i2c 21a4000.i2c I2C adapter i2c-4 i2c i2c-bus-virtual I2C adapter i2c-0 i2c 21a0000.i2c I2C adapter注意:不同的板子上,i2c-bus-virtual的总线号可能不一样,上问中总线号是4。
-
检查虚拟总线下的I2C设备
// 假设虚拟I2C BUS号为4 [root@100ask:~]# i2cdetect -y -a 4 0 1 2 3 4 5 6 7 8 9 a b c d e f 00: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: 50 -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 70: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -
读写模拟的EEPROM
// 假设虚拟I2C BUS号为4 [root@100ask:~]# i2cset -f -y 4 0x50 0 0x55 // 往0地址写入0x55 [root@100ask:~]# i2cget -f -y 4 0x50 0 // 读0地址 0x55
以上是关于完善虚拟的I2C\_Adapter驱动并模拟EEPROM的主要内容,如果未能解决你的问题,请参考以下文章