立体视觉入门指南:对级约束与Fusiello法极线校正
Posted 李迎松~
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了立体视觉入门指南:对级约束与Fusiello法极线校正相关的知识,希望对你有一定的参考价值。
亲爱的同学们,我们的世界是3D世界,我们的双眼能够观测三维信息,帮助我们感知距离,导航避障,从而翱翔于天地之间。而当今世界是智能化的世界,我们的科学家们探索各种机器智能技术,让机器能够拥有人类的三维感知能力,并希望在速度和精度上超越人类,比如自动驾驶导航中的定位导航,无人机的自动避障,测量仪中的三维扫描等,都是高智机器智能技术在3D视觉上的具体实现。
立体视觉是三维重建领域的重要方向,它模拟人眼结构用双相机模拟双目,以透视投影、三角测量为基础,通过逻辑复杂的同名点搜索算法,恢复场景中的三维信息。它的应用十分之广泛,自动驾驶、导航避障、文物重建、人脸识别等诸多高科技应用都有它关键的身影。
本课程将带大家由浅入深的了解立体视觉的理论与实践知识。我们会从坐标系讲到相机标定,从被动式立体讲到主动式立体,甚至可能从深度恢复讲到网格构建与处理,感兴趣的同学们,来和我一起探索立体视觉的魅力吧!
本课程是电子资源,所以行文并不会有太多条条框框的约束,但会以逻辑清晰、浅显易懂为目标,水平有限,若有不足之处,还请不吝赐教!
个人微信:EthanYs6,加我申请进技术交流群 StereoV3D,一起技术畅聊。
CSDN搜索 :Ethan Li 李迎松,查看网页版课程。
随课代码,将上传至github上,地址:StereoV3DCode:https://github.com/ethan-li-coding/StereoV3DCode
让大家久等了,最近工作变动,尚在适应中,望大家海量!
在前面的博文中,我们已经介绍完了基础知识和相机标定,同学们一定想着下一步该往那个方向,在相机标定之后,相机的位姿就确定了,而接下来,拿着相机采集图像是自然会发生的事情,那采集完图像之后呢?我们该做什么呢?
回到立体视觉的最终目标,是通过对图像做双视匹配计算场景的三维坐标,在这入门系列,我不得不得提前解释下什么叫双视匹配,特别是匹配二字的含义。
匹配,英文是match,从字面意义来说,是将N(N>=2)个目标配到一起,这N个目标通常有一些共同或者近似的属性,比如一对耳机的左右两只,他们是同属于一副耳机,比如你和你的兄弟姐们,你们都是你爸妈的孩子。自然地,双视匹配,就是在两个视图中,寻找共同属性的像素点配成对,在立体视觉里,这个共同属性是:它们是空间中同一个点在各自视图的投影,也就是说它们代表了空间中的同一个点。
那为何要做双视匹配呢?这要从三角测量说起,
三角测量是非常简单的一个概念,指的是确定两个点和从两个点出发的射线,就可以计算出两条射线相交的另一个点坐标,三个点形成一个三角关系,所以叫三角测量。
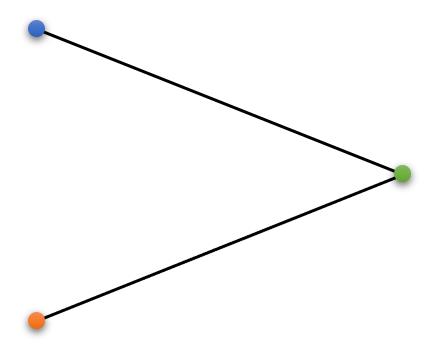
对应到立体视觉里面,三个点分别是:两个相机的光心点和一个空间点,光心的位置通过标定确定,而两条射线是两光心各自和空间点的连线,如果再确定了两条射线,就可以计算出空间点的坐标,有人问,怎么确定两条射线呢?那就是匹配要干的事情了。
我们在上图中加点东西,左边两个点为两个相机的光心
C
C
C,右边的一个点为空间点
P
P
P,在光心前面加上像平面
I
I
I(我在前面博文中就已经说过,像平面的其实是在光心的后方,拿到前面来是等价的,但是理解起来更直观一些)。空间点和光心的连线与像平面的交点为
p
p
p。
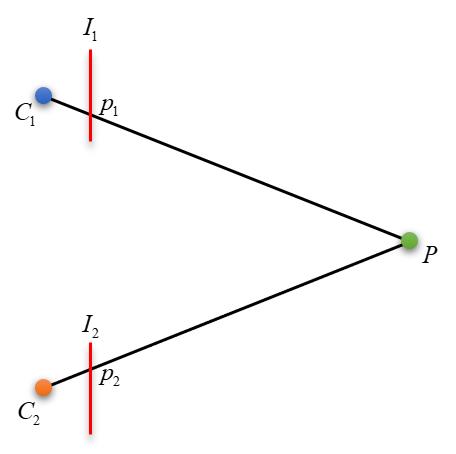
从另一个角度来说,
p
p
p是空间点
P
P
P在图像上的投影点,也就是我们在图像上看到物体的的成像。
好了,回到前面的问题,怎么确定射线 C 1 P , C 2 P C_1P,C_2P C1P,C2P呢?显然,图中有一个很明显的恒等关系是, C 1 P ≡ C 1 p 1 , C 2 P ≡ C 2 p 2 C_1P\\equiv C_1p_1,C_2P\\equiv C_2p_2 C1P≡C1p1,C2P≡C2p2,所以确定射线 C 1 P , C 2 P C_1P,C_2P C1P,C2P可以转换成确定射线 C 1 p 1 , C 2 p 1 C_1p_1,C_2p_1 C1p1,C2p1。 C 1 , C 2 C_1,C_2 C1,C2我们已经通过标定得到了,而 p 1 , p 2 p_1,p_2 p1,p2的确定过程就称为匹配了。一般情况下,我们给定一个像素 p 1 p_1 p1,在另外一个视图中寻找对应的匹配点 p 2 p_2 p2,找到了就可以计算 P P P了。
好了,关于匹配的定义就说到这里。我们回到今天的主题:对极约束。
为什么研究对极约束
在计算机科学中,给定一个确定的问题,一定会有各种算法从研究如何解决它,再上升到如何高效的解决它,而它们也不是依次进行,而是交叉地,即研究最确定解和研究最高效解是同步进行的。而对于匹配问题而言,寻找对应匹配点对这个问题,实在不是个简单问题,几十年来,没有一个算法能完美寻找所有正确匹配点对,角度产生的图像之间的仿射扭曲、弱纹理、重复纹理、暗光、过曝、透明等等,头疼的问题确实非常多,而且有些看上去是无解的,但这丝毫不妨碍众多学者们研究对该问题的浓厚兴趣,从而产生了很多优秀的算法,有很多在实际工程应用中被证明是精确且高效的(这里的精确并不是说它们是几何意义上的精确,而是说工程意义上的精确)。
回到正题,熟悉一点优化思想的人都知道,一旦涉及到搜索空间这个词,就会有人自然而然的想到如何减少搜索空间来提高搜索效率,毕竟我们的计算机是三维空间的人设计的,它的运动也准循着三维空间的规律,没有高维空间折叠能力,在搜索这件事上还是要受限制于空间的大小和距离,但是我们可以也做几件事情:
- 让它的运动空间变小。
- 让它在不存在目标点的位置少做停留。
我们的对级约束就是为了做第一件事,让匹配的搜索空间变小,略去完全不可能是解的像素。简单来说,作为匹配对的两个像素,一定会满足一个约束公式,如果不满足则肯定不是匹配点。这样可以省去非常多的无意义搜索,但稍显遗憾的是,这个约束不是唯一约束,也就是说对于左视图上一个像素点,在右视图上还是会有很多像素满足这个约束,所以只能缩小搜索空间,不能直接确定解。
对极约束,是将搜索空间约束到像平面内的一条直线上,这个我们下面慢慢来说。
极平面和极线
对极约束是怎么来的呢?我们看下图:
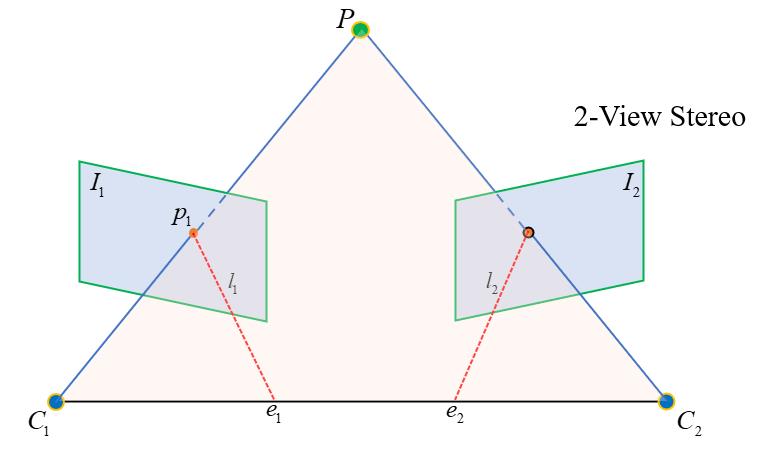
光心 O 1 , O 2 O_1,O_2 O1,O2(原谅我换了个符号)和空间点 P P P形成一个三角关系,实际上它们确定了一个空间平面,这个平面和两个像平面都相交,交线分别是 l 1 , l 2 l_1,l_2 l1,l2,发挥我们的想象力,很容易发现,在 l 1 l_1 l1上的所有点,他的匹配点一定在 l 2 l_2 l2上,这就是对极约束,它将匹配的搜索空间限制到了一条直线上,大大减少了搜索的空间大小,提高匹配效率。而两条直线 l 1 , l 2 l_1,l_2 l1,l2就叫做极线,我们可以称它们两为极线对。这个概念大家记一下,后面会出现。
那怎么确定这条直线呢?我们已知 O 1 , O 2 , p O_1,O_2,p O1,O2,p,可以计算平面 O 1 p O 2 O_1pO_2 O1pO2的方程,它和像平面 I 2 I_2 I2(就是 p 2 p_2 p2所在的像平面)相交的直线即为 l 2 l_2 l2,有了 l 2 l_2 l2的方程就可以在像平面 I 2 I_2 I2里挨个遍历位于线 l 2 l_2 l2上的像素了。在稀疏点匹配里,我们就可以这样做从而提高搜索效率。
极线校正
好了,上面我们讲了对级约束,大家明白了它的概念和空间意义,下面我还要讲一个重要的概念:极线校正,同样要问一句,为什么要讲它,在上面一章中我们提到,对级约束可以让我们减小搜索空间,有了对级约束,对于左视图的一个像素点 p 1 p_1 p1,可以计算出右视图中匹配点 p 2 p_2 p2所在的那条极线 l 2 l_2 l2,从而在 l 2 l_2 l2上搜索正确解。听上去确实不错,大大减少了搜索空间,但它还是存在一个缺点,就是对于左视图的每个待匹配像素,都要计算它对应的那条极线,如果我的待匹配像素非常多(这正是稠密匹配的研究方向:逐像素匹配),那计算量还是挺大的。
有没有一种方法,可以不用计算,直接确定右边的极线呢?
答案当然是有,极线校正就是来回答这个问题!
还是观察上图,我们会进一步发现,极线 l 1 l_1 l1上的所有像素和 l 2 l_2 l2上的像素满足同一种约束公式呢,也就是说极线 l 1 l_1 l1上的所有像素,算出的对应极线,都是同一条 l 2 l_2 l2。究其原因,是因为它们都属于同一个极平面呀!所以可以这样认为,一个极平面就可以在两个视图上找到一对极线,这对极线上的所有像素满足同一个约束公式,而多个极平面就产生了多个极线对,众多的极线对可以涵盖图像上的所有像素点!
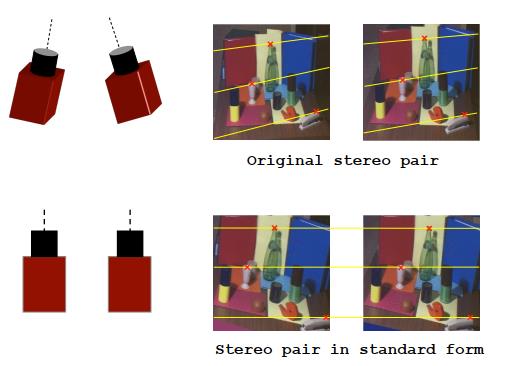
进一步,我们可以将这些极线对上的像素重排列在像平面,同一对极线上的像素排列到同一行,这样我们就可以通过行号来确定同一极线对的像素,不用在计算极线方程了。简言之,左视图像素 p 1 p_1 p1的匹配点一定位于右视图行号相同的那一行像素内。
以上是对于极线校正的一个简单的意义解释。而从几何上来说,我们有更专业的解释:
极线校正是通过对两个相机进行旋转,并重新定义新的像平面,让极线对共线且平行于像平面的某条坐标轴(通常是水平轴),该操作同时建立了新的立体像对。纠正完成后,同一匹配点对,位于两个视图的同一行内,这意味着它们只有水平坐标(或者说列坐标)的差异,这个差异称为视差(简写
d
d
d),数学定义上,视差
d
=
c
o
l
(
p
1
)
−
c
o
l
(
p
2
)
d=col(p_1)-col(p_2)
d=col(p1)−col(p2)(
c
o
l
col
col指水平方向坐标,或者说列坐标$)
这个操作使得稠密匹配变得容易很多,当然,只是相对容易了。
解释完极线校正的概念和意义,我们关心的另一件事是,如何做极线校正?
这就有不同的方式来完成,今天我们主要来讲一讲Fusiello校正法。
我们先来看看我们的目标:
- 极线对平行于某条坐标轴。
- 极线对共线,匹配点对位于像平面的同一行。
为达到这两个目标,我们要进行不同分析,前面说到,极线校正是通过旋转相机和重新定义像平面来做,实际上,两个操作的本质在于重新定义投影矩阵
M
=
K
[
R
∣
−
R
C
]
M=K[R|-RC]
M=K[R∣−RC]。通过旋转相机重定义旋转矩阵
R
→
以上是关于立体视觉入门指南:对级约束与Fusiello法极线校正的主要内容,如果未能解决你的问题,请参考以下文章