matlab多架次无人机(uva)协同植保路径优化(避障)matlab优化算法十五
Posted 张叔zhangshu
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了matlab多架次无人机(uva)协同植保路径优化(避障)matlab优化算法十五相关的知识,希望对你有一定的参考价值。
思路说明
% 一、程序说明 实现任意数目多边形的地图绘制和网格划分,并在此基础上实现任意架次植保无人机作业路径的规划。 路径规划采用牛耕往复式,并考虑电池约束和药液约束,并考虑了多台无人机作业时的距离(避碰)。主要变量含义如下:
MAXliquid 药箱最大容量
MAXbattery 电池最大容量
liquidState 药箱状态
batteryState 电池状态
idleSpeed 非作业时飞行速度
operationSpeed 作业时飞行速度
liquidPerOD 单位距离的药液消耗量
batteryPerOD 单位距离的电池消耗量
主程序展示
global OW OD LineNum MAXliquid MAXbattery
global idleSpeed operationSpeed liquidPerOD batteryPerOD;
OW=0.02;
OD=0.02;
MAXliquid = 5;
MAXbattery =5;
idleSpeed = 0.3;
operationSpeed = 0.2;
liquidPerOD =1;
batteryPerOD =1;
LineNum=1;
%%
% xv1=[0.2 0.5 0.6 0.1];
% yv1=[0.7 0.8 0.3 0.4];
% boundary1=[xv1;yv1];
%
% xv2=[-0.9 -0.7 -0.4 -0.5 -0.8];
% yv2=[0.9 0.95 0.7 0.5 0.6];
% boundary2=[xv2;yv2];
%ght
xv1=[0.2 0.6 0.6 0.1];
yv1=[0.7 0.75 0.3 0.4];
boundary1=[xv1;yv1];
xv2=[-0.9 -0.7 -0.3 -0.4 -0.8];
yv2=[0.9 0.9 0.7 0.5 0.6];
boundary2=[xv2;yv2];
barrier={};
aBarrier=[0.4 0.5 0.5 0.4;0.5 0.5 0.4 0.4];
barrier=[barrier;aBarrier];
aBarrier=[0.2 0.3 0.35 0.2; 0.6 0.6 0.5 0.5];
barrier=[barrier;aBarrier];
aBarrier=[-0.6 -0.4 -0.4 -0.6; 0.3 0.3 0.1 0.1];
barrier=[barrier;aBarrier];
aBarrier=[-0.7 -0.6 -0.6 -0.7;0.8 0.8 0.6 0.6];
barrier=[barrier;aBarrier];
Lines=[];
%Lines = addPatch2Line(boundary,barrier,Lines);
Angle1=pi/6;
Lines1 = addPatch2LineWithAngle(boundary1,barrier,Angle1);
Lines=[Lines;Lines1];
Angle2=pi/4;
Lines2 = addPatch2LineWithAngle(boundary2,barrier,Angle2);
Lines=[Lines;Lines2];
disp('请按任意键开始运行...')
pause;
Routes=routesPlanning2(Lines,barrier,3)
## 运行结果
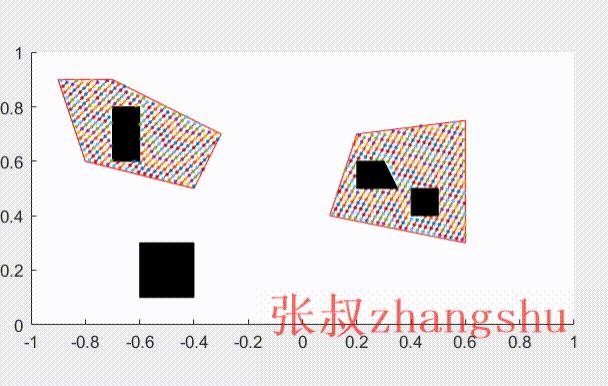
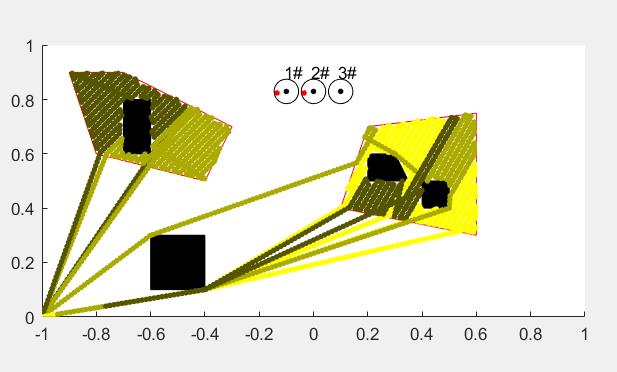
运行结果
某一条路径走过的点
代码下载链接
以上是关于matlab多架次无人机(uva)协同植保路径优化(避障)matlab优化算法十五的主要内容,如果未能解决你的问题,请参考以下文章
协同任务基于matlab蚁群算法多组群UAV协同任务路径规划含Matlab源码 1578期