波士顿动力机器人会跑酷了!单手跨栏高难度后空翻,太6了
Posted QbitAl
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了波士顿动力机器人会跑酷了!单手跨栏高难度后空翻,太6了相关的知识,希望对你有一定的参考价值。
萧箫 发自 凹非寺
量子位 报道 | 公众号 QbitAI
一只手就能翻过“栏杆”:

连踩数个斜坡,稳稳当当:

还有熟悉的双“人”后空翻:

没错,波士顿动力机器人Atlas又来炫技了,这次带来了新活:跑酷!

网友调侃,下一次挑战就是「美国极限体能王」了。

别说,还真有那么一点像:

这样的跑酷机器人,究竟是怎么炼成的呢?
“背后NG无数次”
据波士顿动力表示,这套跑酷动作并非只是包装和“预设”。
也就是说,从切换动作到协调四肢,Atlas都需要依靠视觉算法来调整行为,来适应这一套跑酷环境。
这里面不仅包括大量的硬件设计,还有无数次电脑仿真,一套程序就要用几个月的时间:

同时,在测试时,还要面临无数次NG和修复Atlas的过程。
不仅是斜坡跑酷时,可能会摔倒:

就是在弹跳、上斜坡的时候也可能会滑翻(看着就痛):

至于难度较高的跑酷动作“翻越”(vault),Atlas失败的概率更是达到了50%:

即使是其他的步骤,也都有一定失败的几率,甚至连机器人“挥拳头”的动作,也有可能出现失败。
相比于人来说,机器人没有脊柱,手臂关节也非常弱,因此需要在测试中反复进行调整。
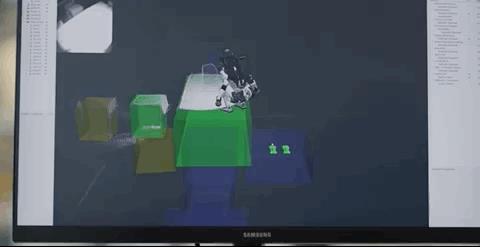
所以,在我们面前炫技的Atlas,放大后其实长这样:

团队的日常,就是加强Atlas的“核心”训练,包括单脚站立等动作:

为了更合理地设计动作,团队自己也得掌握一些跑酷技巧:

再经过无数次反复仿真和重新测试,才有了我们看到的那1分钟完美的Atlas“跑酷”视频。
这次突破,距离上一次我们看见Atlas“跳舞贺新年”,似乎也才过去了几个月的时间。

在实验室突破极限
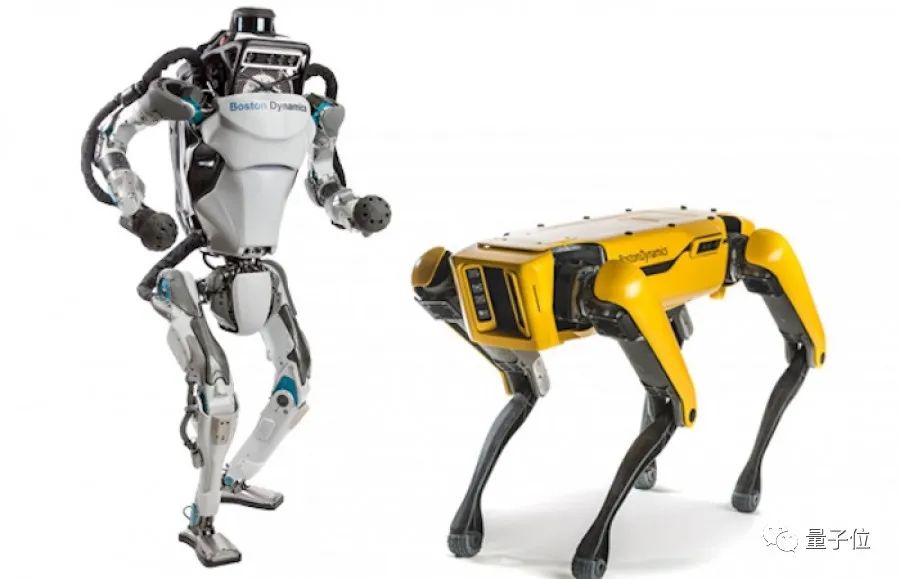
对于波士顿动力来说,机器人Atlas和机器狗Spot其实不太一样。
机器狗Spot是波士顿动力的产品(上市了),但机器人Atlas更像是公司的研究项目,用来不断突破机器人技术的极限。
Atlas团队负责人Scott Kuindersma表示:
我们做的工作,有点类似于“机器人基建”,即构建所有机器人都会需要的核心工作能力。
没错,相比于直接将Atlas上市,它更像是一个实验模型,在产出新研究的同时,也能将这些研究用到波士顿动力的其他产品上。
这个“总能站起来”的机器人Atlas,还会给我们带来什么惊喜?

拭目以待。
Atlas跑酷视频:
参考链接:
[1]https://www.youtube.com/watch?v=EezdinoG4mk
[2]https://www.engadget.com/boston-dynamics-atlas-robots-parkour-demo-141057531.html
[3]https://newatlas.com/robotics/boston-dynamics-atlas-acrobatic-robots-behind-the-scenes/
以上是关于波士顿动力机器人会跑酷了!单手跨栏高难度后空翻,太6了的主要内容,如果未能解决你的问题,请参考以下文章